汽车零部件智能物流与生产一体化系统设计及应用
2016-11-29 00:46东风模具冲压技术有限公司刘寿明战卫红常伟
物流技术与应用 2016年11期
东风模具冲压技术有限公司 / 刘寿明 战卫红 常伟
沈阳沈飞电子科技发展有限公司 / 梅林
汽车零部件智能物流与生产一体化系统设计及应用
东风模具冲压技术有限公司 / 刘寿明 战卫红 常伟
沈阳沈飞电子科技发展有限公司 / 梅林
本文针对东风模具冲压技术有限公司新建二层焊接厂房生产、仓储、物流的特殊需求,开发了由提升机、AGV、RFID等多种硬件设备和应用软件系统组成的汽车零部件生产智能化物流系统——“仓储物流管控一体化系统”。经过近两年的生产检验,证明该系统运行安全可靠,准点高效,具有较大的推广应用价值。
汽车零部件、智能化、物流系统、管控一体化
2013年东风模具冲压技术有限公司为满足生产经营需要启动新建焊装车间,厂房一楼为高位仓库(标高8m),二楼为焊接生产阵地(标高6m),总面积为9870m2,楼层间通过升降机运输,物流系统纳入同步工程设计。其中二楼焊接车间设计共有点焊机器人70台,固定点焊机28台,以及其它辅助设备,预计生产轿车零部件250多个品种。一楼高位仓库有货架59架,每列高6层,库位6957个,主要用于轿车零部件成品、半成品的储存及运输。考虑到零件品种繁多、承载和造价等因素,设计没有采用立体仓库方式,引入高位货架配套高位叉车的智能货位指示存取系统进行存取零件。
出入库零部件品种预计有500余种/天,面对如此多的零件品种,如何对应上6957个库位,并且还要确保库位利用率大、效率高,仅仅依靠人工管理显然难度极大,需要借助智能化物流系统实现高效精准的管理。
一、前提条件
1.工作班次:白班+夜班。
2.周转方式:所有零件规定由一定规格的容器装箱后搬运周转。
3.每天周转需求:入库≥500箱,出库≥650箱。
4.容器规格有近140多个,从 780mm×570mm×470mm至2300mm×1600mm×1050mm不等。材料为金属瓦楞板或金属网和型钢构成,85%的容器为通用容器,零件箱粘贴有二维码标签。
5.生产品种主要为轿车汽车零部件,以轿车侧围类、地板类零件为主。
6.最长的梁类零件长度有2180mm, 单件 净 重20kg左右;最宽的后地板后部零件尺寸1100×900mm,单件净重10kg左右;最小零件的尺寸为40×50mm。
该厂房的第一、二楼间的物流搬运采用7台升降机完成,二楼生产阵地物流采用AGV完成。一般企业的AGV在固定的路径转运固定的产品,而该项目现场一个AGV回路有近50多个工位,涉及到6个车型的成品、半成品近200多个品种。如何保证车间每一平方米、每一个人、每一个物料都安全、精准,需要重点考虑解决。
通过调研国内先进的汽车零部件公司,发现尚未有类似仓库的管理经验可借鉴。目前国内类似仓库的管理通常是:零件箱与库位采用一一对应的固定式管理,在每个货架前挂一对应的零件品种布置图及相应的库位零件品种、数量卡片,再配一个简单的管理软件,作业人员通过软件查找,或通过记忆零件存放的具体位置,办理物料出入库,再将卡片放上或拿走。这样的话,库位利用率低,操作慢,适用于库存量少、周转量小的仓库。

>> 图1 智能物流系统总体设计思路
二、整体物流方案设计
1.方案总体思路
(1)整个物流路线上以料车作为运送单元,所有物料(白件、成品、空箱)放在料车上输送,料车设四个万向轮,规格一致(能够用于AGV搬运)。
(2)以AGV、提升机、自动输送装置和叉车作为物流工具,除一层分拣料、备料需人工操作外,其他物流为无人作业。
(3)以生产计划为导向建立物流配送系统,实现物流的自动配送和物料管理。
(4)按照最短物流路线原则,采用物料存放与生产相对应进行区域划分。
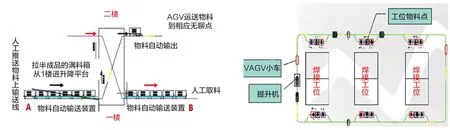
>> 图2 智能物流系统总体设计布局
(5)白件半成品或成品空箱由叉车从相应存放点取下,放到A点料车上,依次推到提升机入口自动输送线前,自动输送线可预备5~6箱等待,货物从入口自动进入提升机;到位后,提升机自动上行到二层,由AGV送到需求工位。
(6)当某一个工位有成品或半成品空箱发送需求时,该工位操作人员先将货物或空箱推送到AGV站点,由AGV将货物运送到相对应提升机入口点;当货物进入提升机到位后,提升机开始下行到一层,到位后提升机自动将货物送到输送链板上,约预备5、6箱等待自动前行、下货、分拣;空箱由人工分配到相应空箱区,成品由叉车存放到成品区。
2.系统设计难点
现场物流管理的载体在于“物流”,如果无物可流的话,现场非常好管理,但最怕的是有物难流,这样就容易产生“乱流”,进而出现各种无效的工作和救火式的管理,现场日渐混乱。因此,首先要理顺现场的逻辑关系,做到“物道自然”,那么现场就不会有过多在制品、容器具,人员、物料也不会到处都是,因为每一平方米、每一个人、每一个物料都在自然流淌。
通过对生产计划、车间作业、升降机、AGV、叉车等各环节间的作业分析,一、二层焊接车间整体物流要顺畅,存在难点如下:
(1)何时、送何种产品、到何工位?
(2)升降机与二楼AGV如何衔接?
(3)二楼AGV与生产工位如何衔接?
(4)升降机与叉车如何衔接?
(5)入库零件信息的快速识别。
(6)出库零件信息的快速传递。
(7)库位的自动分配与防错。

>> 图3 智能物流系统示意图
3.方案分析及方案制定
整个焊接车间智能物流系统由高位叉车、升降机、AGV、高位货架等设备以及协调控制各设备工作的物流控制系统组成,其功能如下:
a.物流环节包括:入库、上货架、出库、上楼、到工位、工位发货、下楼;
b.高位货架:储存放置物料箱,确保物、位一一对应,便于管理;
c.升降机:垂直输送车间与仓库物料;
d.高位叉车:升降机与高位货架间的物料搬运;
e.AGV:焊接车间工位间物料搬运;
f.物流控制系统:精确指挥协调各设施间的工作和物料数据管理。

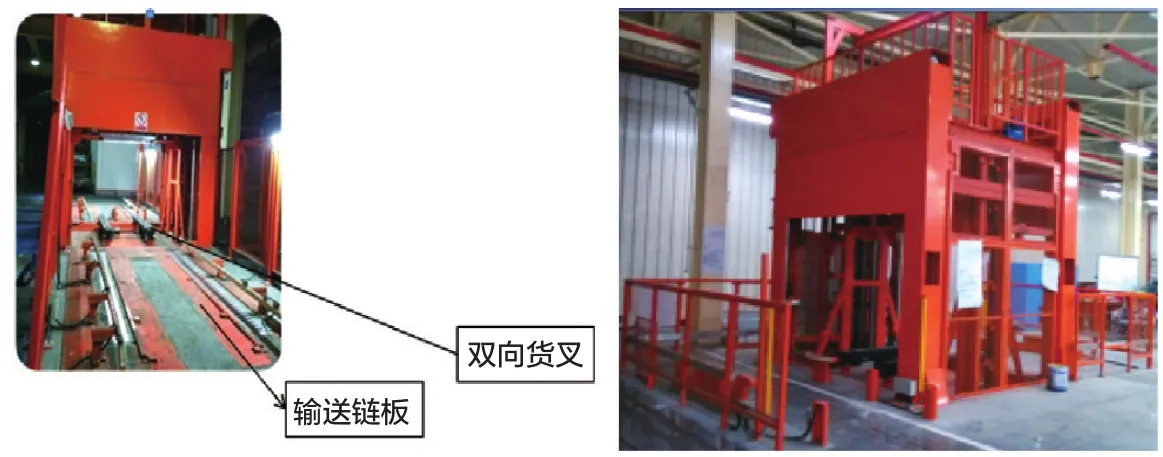
>> 图4 升降机、高位叉车、高位货架
(1)物流控制系统方案设计(见图6)
(2)系统结构

>> 图5 智能物流AGV
整体物流系统是由多种硬件设备和多个应用软件系统组成的一个协同工作的综合系统。采用三层结构,即任务和数据管理(管理层)、集中监控和设备调度(监控调度层)、多种任务执行设备(设备控制层)。

>> 图6 新型物流控制系统硬件配置
其中管理层负责统一协调全系统的运行,是管理与指挥中心。通过接收并分解企业MES下达的作业计划,将作业计划分解为作业指令下达给调度监控层,实现作业管理与仓储管理;
监控调度层,是连接物流管理层及设备执行层的枢纽。上接管理层,接收作业指令,优化调度分解作业指令,将执行命令下达给控制系统,实时监控设备运行状况及故障信息,提供动态仿真画面与人机交互界面。
设备执行层控制系统接收监控调度层下达的执行命令,主要由现场操作终端、变频器以及AGV、升降装置系统等设备组成。PLC基于工业以太网的总线方式控制设备运行。

>> 图7 新型物流系统流程图
(3)设施选型方案
要实现系统方案,必须对系统涉及的设备有一定的结构要求。选型原则:快速采集物料信息,快速信息传递;保证高位库的利用率最大;保证出入库效率最高。
随着技术的不断进步,满足各类工况使用的物流设备大量涌现,如何选择适用现场物流方案的设备,是该项目实施前要考虑的一大问题。而整个物流系统的每个环节都与物料信息相关,系统如何快速获得物料信息是整个项目的关键。

>> 图8 RFID电子标签
①射频识别技术开发应用
根据RFID(射频识别技术)和二维码的技术特点,考虑到现场的生产使用环境:a.电子标签可重复使用,因为容器大部分是通用容器;b.可远程识别,因为要快速识别信息就要做到叉车司机无需下车就可获得零件信息;物料一上楼,系统就可获得信息等一系列实际作业情况。
鉴于RFID电子标签具有诸多优点:a.抗金属标签能够穿过任意材料的物品而不降低它的读取距离;b.标签有不同的封装形式;c.该频率的磁场区域能够产生相对均匀的读写区域;d.大容量存储,可以把物品信息数据、重复写入标签中等,决定采用RFID电子标签。这样,每一个装了电子标签的物料在整个生产物流环节,在一定范围内(约25m)信息都尽在掌握中。
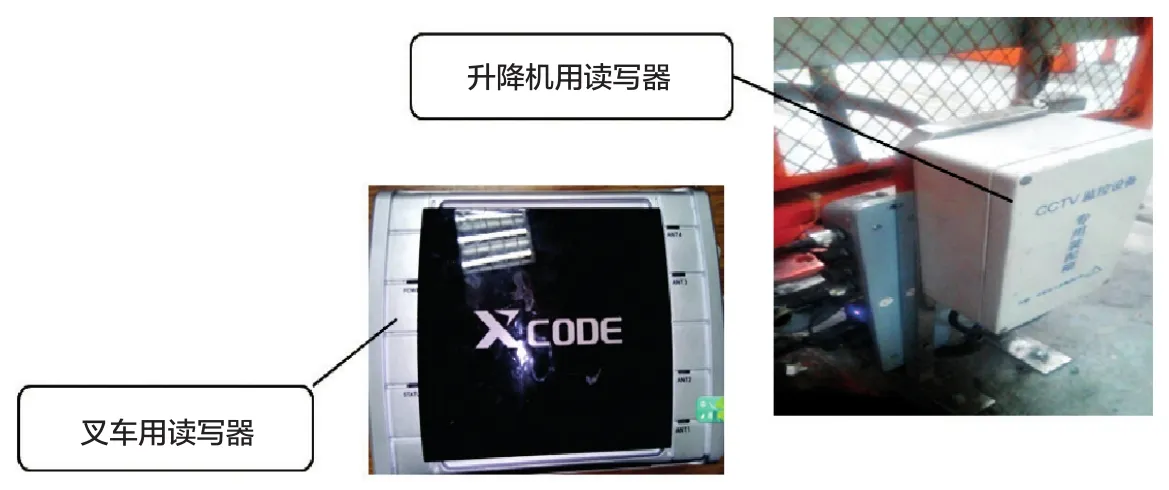
>> 图9 新型物流系统读写器布置
②读写器的布置
阅读器根据使用的结构和技术不同可以是读或读/写装置,是RFID系统信息控制和处理中心。阅读器通常由耦合模块、收发模块、控制模块和接口单元组成。阅读器和应答器之间一般采用半双工通信方式进行信息交换,同时阅读器通过耦合给无源应答器提供能量和时序。在实际应用中,可进一步通过Ethernet或WLAN等实现对物体识别信息的采集、处理及远程传送等管理功能。
>> 图10 新型物流系统标签信息读取
③RFID配置
将电子标签通过红色绳子固定在容器箱上,因入库零件箱上已粘贴二维码信息,所以系统将RFID与零件箱二维码信息绑定即可。零件信息包含:零件号、零件名称、零件数量、生产日期、生产批次。运行数据全程保存,可实现全过程信息采集、跟踪,并保证可追溯。
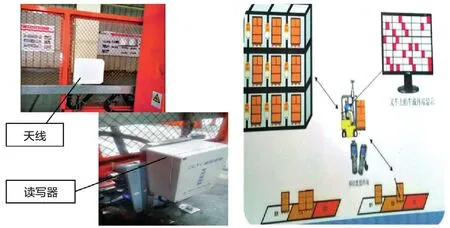
为了能够方便叉车人员迅速找到需要存取物料的货位,在高位叉车上配置车载终端电脑、阅读器、天线。车载终端系统与物流管理系统紧密连接,接收存取任务,合理调度各个叉车进行有序工作,为叉车操作人员进行路线导航。提高现场出入库效率。

>> 图11 新型物流系统用手持终端
在升降机出口处安装天线、读写器。物料上楼、出升降机门,系统出口处的天线感应料箱电子标签,读写器将信息反馈给系统,系统将作业信息发送给AGV控制系统;作业信息指示最近AGV小车将料箱拉到相应物料需求工位。
④手持终端
采用具有数据存储及计算能力的智能手持终端,根据业务需要进行二次编程开发,借助无线AP交换机联接入局域网中,通过SOCKET方式或直接访问数据库的方式与条码系统进行数据交换与业务流程衔接。

>> 图12 新型物流系统流程图
⑤工位呼叫装置
在二楼焊接车间每个生产工位安装有4个需求按钮,分别代表成品发交、空箱发交、半成品需求和空箱需求。工人每次按需求通过几个按钮来拉动生产。
⑥货位防错功能设置
在每个货位上安装一电子标签,货位电子标签与货位零件箱信息绑定。这样叉车放、取零件时可校验零件箱的正确与否。
在位于高位库巷道两边安装货架指示灯,同时在每列货架的立柱上也安装指示灯。将入架的零件箱货位与指示灯进行一一对应,根据所接信息,点亮货架指示灯,直到操作者确认取出(送入)为止即结束(指示灯熄灭)。
通过专用控制器对货架进行管理,可构筑独立的系统。使用较少配线的机器,对货架更改少,安装更方便。在起到防错功能的同时还为叉车操作人员进行路线导航。
4.升降机方案设计
升降机为链式四柱结构,减速电机带动链传动线体传动。升降车载重1吨,设置有通过式对开门洞,即一边进物料,另一边出物料。升降机结构由三部分组成:往复式升降装置、与往复式升降装置对接的地面输送装置和安装在往复式升降装置内的接送料箱的双向叉式移栽装置(货叉)。升降机一层进出口设置地面垂直链或链板式输送链,可存放4个缓存料箱。料箱按“一”字型排列,自动依次往前行进,直至双向货叉将料箱叉入升降装置。一层升降装置物料出口亦如进口处,自动出一个,前进一个,按“一”字型排列存放4个料箱,直至人工转移走。这样可缓解进出口物料堆积。升降机控制系统具有与现场总线控制系统进行数据传输的能力。

>> 图13 新型物流系统货位防差错
>> 图14 新型物流系统升降机
5.AGv方案设计
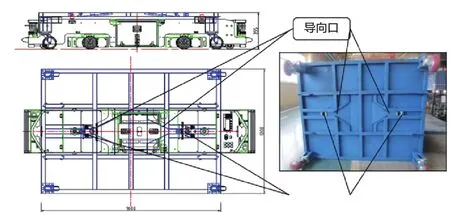
为了提高自动化水平,减少用工及降低成本,近几年来汽车厂普遍应用AGV物流技术。由于多品种生产的需要,现场使用零件箱种类较多,零件箱的结构受零件结构和客户要求限制,难以做到规格大小标准化。此外,考虑到物流周转的方向性、升降机进出口的定位等因素,决定采用单向、潜入拖拉型的潜伏式AGV。运行方式:将所有零件箱分别放置在一四轮托盘小车上,AGV从料车底部进入,检测到位后,升起牵引销,带动料车行走。
>> 图15 新型物流系统料箱图

>> 图16 新型物流系统AGV路径设计
(1)料箱托盘的结构设计
作为料箱与AGV之间的介子料箱托盘,既要满足AGV牵引尺寸的要求,又要满足升降机二楼进出口定位的要求,所以,还要设有两个AGV嵌入口,因为只有这样才可保证料车不受方向限制。而容器规格繁多,要适合所有料箱的尺寸要求,只有考虑单边尺寸合适,另一边的单向两边可超出托盘部分,小的按放2箱设计的原则。
鉴于零件箱最大尺寸(长×宽×高):2300mm×1600mm× 1500mm, 到 800mm×600mm× 640mm规格不等,确定料箱托盘尺寸(长×宽):1600mm× 1200mm,考虑AGV的穿入高度(高度应≤340mm);料车托盘的4个轮子均采用万向轮,这样可不受方向限制。考虑定位牵引方式及升降装置中叉子的位置,料车运行方向两端均可以作为牵引方向,即两端各有一套定位牵引装置;适用所有零件箱运输。

>> 图17 新型物流系统指令设计
(2)AGV路径设计
根据二楼焊接车间生产工位(A01….A11,B01….B11)的布置,设计了AGV运行环线及停靠站点的位置。围绕2台升降机,分别设计2个回路,左边为一号升降机回路,右边为二号升降机回路,参见图16。
6.高位库区域设计
根据二楼焊接车间生产阵地布置情况,以及升降机周转就近原则,将一楼高位货架存放零件品种与二楼生产车型一一对应。这样可确保物流周转路径最短。

>> 图18 新型物流调度系统指令

>> 图19 新型物流系统半成品入库扫码
根据容器型号大小和数量,同时尽量减少货架类型,增加容器通用性,容器按尺寸大小进行分类:1000mm以下的为一类;1000mm至1400mm为一类;1400mm以上为一类。
货位的分配原则:
(1)大件容器、托盘容器放在货架的低层,如第一、二层;
(2)中型容器、小型容器、好操作的容器放在货架的高层;
(3)周转频次高的货物放在距离升降机最近的位置;
(4)同区域、同类容器零件共用同一类货位,同类货位通用。
这样基于成本和效率的货位分配策略,使得货位的利用率最大,物流的路径最短。
三、方案实施
焊接车间物流管控一体化项目,硬件部分包含:一套升降机系统、一套AGV输送系统、高位货架库、一套指示灯库房拣选系统、一套无线呼叫系统、一套高位叉车系统(高位叉车与车载智能设备);软件部分包含:一套自主研发的物流管理系统、一套条码规范、一套WMCS物流管控系统(包含运行于PC系统的物流管控软件WMCS、手持终端及手持系统、车载终端及车载系统、LED任务指示系统),以及用于PC-PLC、PC-设备间通讯的若干网络设备,RFID标签与制签设备等。

>> 图20 新型物流系统半成品入库
1.新型物流系统构成
(1)存储系统
货架、指示灯系统与叉车系统,辅以若干手持设备,组成了本系统的核心物流存储体系。该系统使用的条码规则,为东风模具冲压技术有限公司唯一条码规则,规定了货架存储区域内(也包括部分平面堆场)的所有物料、物资均符合该条码规则。货架区使用RFID技术进行货位认址。高位叉车系统接收任务指令,同时指示灯系统与叉车车载终端均对任务位置与任务类型等信息做出指示,使用高位叉车上的RFID设备进行货物、货位识别,即可进行仓储业务。整个任务执行过程,均由系统发出指令,无需人工判断。
(2)物流调度系统
升降机、AGV、呼叫系统组成了物流调度系统:焊接工位的操作人,使用手持终端进行半成品要货,该信息由WMCS系统处理后,分发到库房仓储系统执行,所需物料到达升降机入口后,由控制系统接管,通过物料容器上的RFID标签,系统判断调度路径,经由升降机、AGV运输,到达指定工位卸货处(货到人运输)任务完成。整体调度过程,除手持扫码外,无其他人工操作,主要依靠系统对设备的启动、停止、运输路径进行操控。同时为保证运输的效率,系统对AGV、升降机进行了交通管控,保障了运输路径的畅通与物流现场的安全。
2.物流管控系统功能
(1)软件系统具有角色、用户权限分配管理功能,定义不同角色和权限,并对系统的操作进行动态日志跟踪管理;
(2)系统可提供多种报表,包含日报表、月报表,提供灵活的报表平台,作业人员可以通过设置工具进行报表的自动调整,报表数据可导出为常用的电子表格形式。

>> 图21 新型物流系统半成品出库
3.物流管控
(1)半成品入库
半成品挂签——先入高位库规定的所属暂存区,由保管员通过手持终端扫零件箱二维码与电子标签绑定(见图19)。
入库——高位叉车叉取货物,系统通过车载读写器读取该零件箱,并在叉车显示屏上提醒所对应的库位编码,同时相应货架信号灯、库位信号灯亮起提醒。将零件箱对号入座至相应库位,核对库位标签与系统显示库位一致时,放下零件、确认、系统自动入库、上账,库位信号灯、巷道信号灯熄灭。
(2)半成品出库
车间半成品需求——车间生产线班长根据生产作业计划需求,通过手持扫二维码册、输入出库数量(系统自动折算零件箱数量)、输入零件停靠站点号、确认所有零件品种。
叉车出库——系统通过车载显示屏通知高位叉车具体库位,同时相应库位货架信号灯、库位信号灯亮起提醒。高位叉车取下货物放到规定的升降机入库备货区后确认,系统自动出库下账。
(3)半成品上楼
物料放进升降机进口输送链上自动前行,到入口位置升降机货叉自动取货上升;当物料由升降机输送到二层出口时,货叉自动送到出口,出口处读写器可获取料箱电子标签信息,将信息反馈给AGV控制系统;AGV控制系统接到信息后,调度最近AGV小车将料箱运送到相应物料需求工位。

>> 图22 新型物流系统半成品上楼
(4)空箱上楼
焊接车间生产线班长根据生产作业计划需求,扫空箱二维码,系统将信息传输到升降机口LED屏显示通知(容器型号、站点编号),由升降机口作业人员将写有相应站点信息的标签挂到所要零件箱上,送进升降机进口输送链上自动前行,到入口位置升降机货叉自动取货上升;当物料由升降机输送到二层出口时,货叉自动送到出口,出口处读写器可获取料箱电子标签信息,将信息反馈给AGV控制系统;AGV控制系统接到信息调度最近AGV小车将料箱运送到相应物料需求工位。
(5)物料下楼
焊接车间工位成品完工需要下楼时,工位操作工将物料到线边物料站点,启动发货按钮,系统指示最近AGV小车将物料送到升降机入口处时,触碰控制开关;AGV离开,升降机货叉取料箱进入、下一楼,系统通知相应库位区域高位叉车取成品入库。空箱下楼与此相同。

>> 图23 新型物流系统与现行物流的衔接
(6)与现行物流系统接口
物料下楼向物流系统反馈半成品出库、半成品入库数据。
①半成品入库反馈(给物流系统):每小时或每2小时一次,定期按单位编码、零件号、批次汇总半成品入库数据后,通过链接服务器反馈给物流系统。
②半成品出库反馈(给物流系统):每小时或每2小时一次,定期按单位编码、零件号、批次汇总半成品出库数据后,通过链接服务器反馈给物流系统。这样使高位库的信息始终与公司现用物流系统信息保持一致。
四、项目实施成果
该项目与新厂房建设同步,厂房建设、产品工艺布局、流程的建立、物流的规划、物流设备选型等同步实施,涉及技术部、物流部、生产车间、设备部、规划部、采购部等多个部门,相互关联大,影响大,由于在实施过程中各团队的及时沟通,保持了信息的透明与流畅,使得整个项目分批实施,不断完善,把人员、物料、设备、能源、场地和信息等生产要素组成了一个富有生产力和有效运行的整体系统。
该项目针对新建二层楼焊接车间生产、仓储、物流的特殊性,建立了“仓储物流管控一体化系统”。该系统采用信息集成技术,结合先进的RFID、指示灯拣选技术设施,按生产作业顺序计划,实现AGV系统、升降机系统、工位呼叫系统等多个物流输送设备的智能化协同调配,使整个焊接生产、仓储、物流管控自动化。将信息网络技术与传统制造业相互渗透、深度融合,将现有物流设施资源效率发挥到最大化。通过RFID使得物料信息在整个物流系统的各个环节快速识别、快速传递;解决了升降机与AGV、AGV与工位的衔接问题;并通过采用工位呼叫与系统结合,解决工位实时需求问题;同时,实现了库位的自动分配和防错功能。
猜你喜欢
石材(2022年2期)2022-05-25
石材(2022年1期)2022-05-23
食品界(2020年4期)2020-05-03
制造业自动化(2019年11期)2019-12-05
中国特种设备安全(2019年4期)2019-05-20
好孩子画报(2019年10期)2019-01-10
中国特种设备安全(2018年10期)2018-12-18
物流科技(2017年2期)2017-03-27
凿岩机械气动工具(2016年3期)2016-03-01
中国现代药物应用(2013年15期)2013-10-31