
三相8极无刷直流电机控制系统设计*
2016-11-28 06:12岳学磊杨瑞坤华伟民
电子技术应用 2016年4期
岳学磊,白 鹏,杨瑞坤,华伟民
(空军工程大学 理学院,陕西 西安 710051)
三相8极无刷直流电机控制系统设计*
岳学磊,白鹏,杨瑞坤,华伟民
(空军工程大学 理学院,陕西 西安 710051)
以TMS320F28335 DSP作为核心控制器,提出三相8极无刷直流电机控制系统的设计方案。对主要硬件电路和软件程序做了详细设计,并给出了相应的电路原理图和程序流程图。其中转速调节算法采用改进单神经元自适应PID控制算法,通过自适应调整控制参数,提高了控制系统对环境的自适应性。通过实验可知:所设计的无刷直流电机控制系统是可行的,采用改进单神经元自适应PID控制算法可以使无刷直流电机的响应时间更短,超调量和波动更小。
无刷直流电机;硬件电路;控制软件;单神经元
0 引言
无刷直流电机是电力电子技术、微电子技术、控制理论和电机技术相结合的产物。具有启动时间短、启动转矩和制动转矩大、调速范围大、结构简单、噪声低、可靠性高、维护周期长等优点。被广泛应用于国防、航空航天、机器人、自平衡车、无人机、电动汽车、家用电器、办公自动化以及工业过程控制等领域。
本文给出了基于TMS320F28335 DSP的无刷直流电机的控制系统设计方案,对控制系统的主要硬件电路模块进行了详细设计,包括电机驱动电路和控制电路的设计。并给出了转速调节子程序的设计方法[1-2]。
速度调节算法通常采用传统PID控制算法,但它的控制参数采用一次整定方式,要想在各个运行阶段都达到良好的控制效果,参数的确定往往难以实现。文献[3]提出了一种基于模糊调节的免疫反馈PID控制,具有传统PID控制结构简单、可靠性高、鲁棒性强等优点,提高了抗干扰性和对工况的适应性;文献[4]将微粒群优化算法和单神经元自适应控制结合,应用在无刷直流电机的控制系统中,提高了系统的自适应性;文献[5]将遗传算法和模糊控制结合,对电机进行优化控制,控制系统的自适应性得到了提高。文献[6]利用RBF神经网络对无刷直流电机控制系统进行优化,对电机转速和相电流进行实时采样,修正神经网络的权向量,通过控制电枢电压实现对电机转速的控制。
本文采用改进单神经元自适应PID控制算法,可以对控制参数进行自适应调整,从而提高系统对环境的自适应性。实验表明,采用的改进单神经元自适应PID控制算法可以使无刷直流电机的响应时间更短,超调量和波动更小。
1 系统总体设计方案
以TMS320F28335 DSP为核心控制芯片,设计了无刷直流电机控制系统。DSP通过捕获口 CAPl、CAP2、CAP3捕捉位置传感器的跳变信号,触发捕获中断,通过读取 3个CAP口的电平状态,得到电机控制字,然后DSP发出相应的控制指令,以改变PWM信号的开关量,进而改变开关管的导通顺序,实现对电机转速和旋转方向的控制。控制系统的设计框图如图1所示。

图1 控制系统设计框图
控制系统的控制对象为 24 V/65 W的三相 8极无刷直流电机,采用转速、电流双闭环实现对电机的转速控制。系统的外环为速度环,DSP根据给定速度值与经霍尔传感器得到的速度值通过改进单神经元自适应PID控制算法得到电流给定值。内环为电流环,对速度控制器的输出电流给定值与由经A/D采样得到的电流值比较,通过传统PID控制算法,给出对应的PWM控制信号,实现对电机的调速控制。
2 硬件电路设计
2.1无刷直流电机驱动电路
功率变换电路的主要功能是将直流母线电压逆变为交流电压来驱动无刷直流电机旋转。本文的控制对象是65 W的中小型电机,因此功率变换电路采用驱动芯片+MOSFE的方式,DSP输出的PWM信号经过功率放大、光电隔离处理后送入驱动芯片,驱动功率管MOSFET开通和关断。
驱动芯片选用 International Rectifier公司生产的IR2136,此芯片为三相逆变电路驱动器集成电路,适用于驱动无刷直流电机、永磁同步和交流异步电机等。驱动芯片的电路图如图2所示。
图2中,二极管D1、D2、D4与电容C4、C5、C6组成升压电路,二极管的作用是防止电流倒灌,电容的作用是存储电压。脉冲频率较高时,升压电路的电压为输入电压加上电容存储电压,导致电压增大。设计升压电路是为了提高驱动电压幅值,使驱动芯片能够可靠地驱动高压侧功率管的开通。

图2 IR2136电路原理图
2.2控制电路
TMS320F28335的ePWM模块有ePWM1~ePWM6共6个子模块,每个ePWM子模块有两路PWM输出,分别为ePWMxA和ePWMxB。三相电流桥由6个功率管MOSFET组成,每个桥臂上的两个功率管MOSFET的控制信号相互关联。所以,前3个ePWM子模块(ePWM1、ePWM2、ePWM3)就可以满足无刷直流电机的控制要求,PWM控制信号分别为 ePWM1A和 ePWM1B、ePWM2A和 ePWM2B、ePWM3A和ePWM3B。因为DSP引脚输出信号的负载能力有限,所以输出的PWM信号需要经过功率放大器提升负载能力,选用的功率放大器为 74HC245,相应的电路如图3所示。

图3 PWM缓冲电路
3 转速调节子程序
釆用改进单神经元自适应PID控制算法实现转速的调节,算法可以对控制参数进行自适应调整,从而提高系统的抗干扰性和对环境的自适应性。算法表达式如下:

式中,ηI、ηP、ηD分别为积分、比例、微分的学习速率;wi(k)为加权系数;K为比例系数,K>0;e(k)为速度偏差;De(k)为速度偏差的变化量。
算法的实现过程为:电机运行时,通过DSP的通用定时器可以获取相邻两次霍尔信号变化的时间间隔,从而计算出电机的实时转速。与给定速度比较,可以得到转速的偏差error。与上次得到的偏差error_1相减,可得偏差的变化量 d_error。根据算法表达式,可以得到程序的流程图,如图4所示。

图4 改进单神经元自适应PID控制的流程图
图中,r为给定转速,y为电机反馈的实际转速,error和error_1为转速偏差,d_error为偏差的变化量,lr_p、lr_i、lr_d分别为比例、积分、微分的学习速率,wp、wi、wd、wp_1、wi_1、wd_1、wp_11、wi_11、wd_11、wadd为加权系数,K为比例系数,u和u_1为系统的输出。
4 实验结果与分析
4.1PWM控制信号的测试
为了降低功率管MOSFET的功率损耗,采用上桥臂工作于PWM状态进行调压的控制方法,下桥臂工作于常通状态。如图5、图6分别为A相上桥臂和下桥臂的MOSFET工作波形。
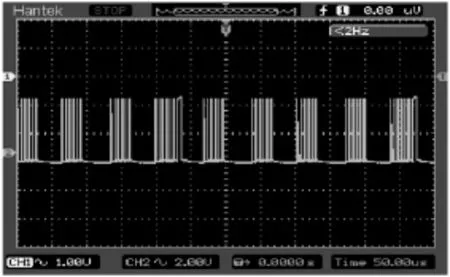
图5 上桥臂的MOSFET工作波形
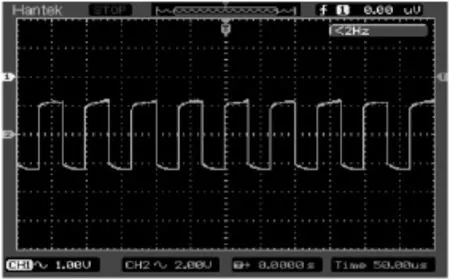
图6 下桥臂的MOSFET工作波形
4.2转速信号检测
转速调节程序中首先采用传统PID控制算法,设置电机的运行时间为5 s,给定转速为2 500 r/min。电机开始运行,期间每隔 50 ms计算一次转速,并保存在数组中,5 s后电机停止运行。转速调节程序采用改进单神经元自适应PID控制算法,重复上述实验,分别得到如图7、图8所示的速度响应曲线。

图7 基于传统PID控制算法的响应曲线

图8 基于改进单神经元自适应PID控制算法的响应曲线
通过对比上面速度响应曲线,可以得出:在给定转速(2 500 r/min)下,采用传统 PID控制算法,系统自空载启动到达稳态所需时间为 0.6 s,且超调量较大,约为20%;采用改进单神经元自适应 PID控制算法,系统自空载启动后在较短时间内(约0.2 s)进入稳定状态,超调量很小,仅为1%左右,此外,速度曲线的波动很小。
5 结论
本文以三相8极无刷直流电机为控制对象,设计了无刷直流电机控制系统,对主要硬件电路和软件程序做了详细设计,并给出了相应的电路原理图和程序流程图,其中转速调节算法采用改进单神经元自适应PID控制算法。实验表明,所设计的无刷直流电机控制系统是可行的,转速调节采用改进单神经元自适应PID控制算法,可以使无刷直流电机的响应时间更短,超调量和波动更小,达到了预期目的。
[1]马文斌,杨延竹,洪运.步进电机控制系统的设计及应用[J].电子技术应用,2015,41(11):11-13.
[2]徐龙威,杨帆,徐令令,等.基于TMS320F28335无刷直流电机控制系统设计[J].电子测量技术,2013,36(9):79-83.
[3]夏长亮,刘丹,王迎发,等.基于模糊规则的无刷直流电机免疫 PID控制[J].电工技术学报,2007,22(9):68-73.
[4]代睿,曹龙汉,何俊强,等.基于微粒群算法的无刷直流电机单神经元自适应控制[J].电工技术学报,2011,26(4):57-63.
[5]夏长亮,郭培健,史婷娜,等.基于模糊遗传算法的无刷直流电机自适应控制[J].中国电机工程学报,2005,25(11):129-133.
[6]胡云宝,王加祥,曹闹昌.基于RBF神经网络无刷直流电机调速系统[J].微电机,2013,46(1):63-66.
Design of control system for three-phase 8 pole brushless DC motor
Yue Xuelei,Bai Peng,Yang Ruikun,Hua Weimin
(College of Science,Air Force Engineering University,Xi′an 710051,China)
By applying TMS320F28335 DSP as the core controller,the design scheme of the control system of three-phase 8 pole brushless DC motor was given.The main hardware circuit and software were designed in detail,and the corresponding circuit schematic diagram and program flow chart were given.The speed adjusting algorithm adopts improved single neuron adaptive PID control algorithm.Through adaptive adjustment of control parameters,the adaptability to the environment control system was improved.The experiment showed that:the design of brushless DC motor control system is feasible with the improved single neuron adaptive PID control algorithm,the response time of the brushless DC motor was shorter,overshoot and the curve of speed wave were smaller.
brushless DC motor;hardware circuit;control software;single neuron
TM36+1
A
10.16157/j.issn.0258-7998.2016.04.017
陕西省科学技术研究发展计划项目(2011K06-115)
(2015-12-11)
岳学磊(1988-),通信作者,男,硕士研究生,主要研究方向:无刷直流电机优化控制及故障检测,E-mail:yuexuelei2014@126.com。
白鹏(1966-),男,博士,副教授,主要研究方向:信号与系统。
杨瑞坤(1978-),男,博士,教员,主要研究方向:开关磁阻电机优化与故障诊断。
中文引用格式:岳学磊,白鹏,杨瑞坤,等.三相 8极无刷直流电机控制系统设计[J].电子技术应用,2016,42(4):60-62,66.
英文引用格式:Yue Xuelei,Bai Peng,Yang Ruikun,et al.Design of control system for three-phase 8 pole brushless DC motor[J].Application of Electronic Technique,2016,42(4):60-62,66.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
纺织科学研究(2020年1期)2020-05-21
现代装饰(2018年5期)2018-05-26
制造技术与机床(2017年6期)2018-01-19
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
中国生化药物杂志(2015年4期)2015-07-07
弹箭与制导学报(2015年1期)2015-03-11
舰船科学技术(2015年8期)2015-02-27
