电传动装甲车辆发动机-发电机组建模与仿真研究
2016-11-28 05:39刘春光刘越战
微特电机 2016年6期
刘春光,项 宇,刘越战
(1.装甲兵工程学院 全电化技术重点实验室,北京 100072;2.太和县马集乡农业综合服务站,阜阳 236600)
电传动装甲车辆发动机-发电机组建模与仿真研究
刘春光1,项 宇1,刘越战2
(1.装甲兵工程学院 全电化技术重点实验室,北京 100072;2.太和县马集乡农业综合服务站,阜阳 236600)
发动机-发电机组是电传动装甲车辆的核心部件,建立其仿真模型对电传动技术研究具有重要意义,其较强的非线性特性大大增加了其建模仿真难度。通过采用实验数据与控制理论相结合的方式建立了发动机稳态模型。基于发电机时变参数建立其仿真模型,设计了整流稳压及弱磁控制方案。通过仿真与台架试验验证了部件及机组模型的可靠性。
电传动装甲车辆;发动机-发电机组;建模仿真
0 引 言
当前,全电战斗车辆成为装甲车辆发展方向[1],而电传动技术是全电化的基础。由于当前储能技术还不能满足车辆行驶、防护、火力等系统的电力需求,发动机-发电机组仍然是电传动车辆的主能量源[2-3],发挥着不可代替的作用,与动力电池和超级电容一起为各类用电设备提供电力。负载在多动力源之间的分流控制是电传动领域研究的关键技术之一[4],建立发动机-发电机组模型,能够为研究主动力源和辅助动力源的优化控制提供基础。本文将在MATLAB/Simulink环境下,建立发动机-发电机组的仿真模型,并对模型进行验证。
1 发动机建模
发动机工作过程受多种因素影响[5],依据发动机原理的建模过程过于复杂,而根据实验数据、公式法等方式描述发动机工作特性的建模方法较适用于控制策略研究。因此,本文根据发动机实验数据及其油门调节原理建立其动态仿真模型。
1.1 发动机稳态模型
对发动机台架试验获得的发动机稳态输出数据进行拟合,结果用于模拟发动机稳态条件下的输入输出特性。对数据的学习方法较多,但是各种方法的学习精度不同,其中神经网络学习精度高[6-7],适用于发动机稳态数据学习。
设计双输入、单输出,含有一个隐含层的BP神经网络,输入为发动机油门和转速,输出为发动机转矩,如图1所示。网络训练迭代次数1000,学习率0.1,训练目标0.000 1。
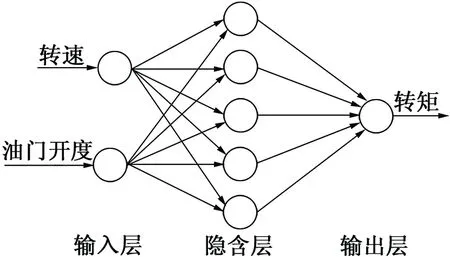
图1 神经网络拓扑结构
利用测得的发动机台架数据对神经网络进行训练,选取部分实验数据对网络学习结果进行测试。测试结果如图2和图3所示。
由图2和图3可知,网络预测输出与实际输出相近,预测误差在1%以内,学习精度较高。发动机转速、油门开度、转矩关系如图4所示,作为发动机稳态模型。

图2 测试结果图3 测试误差
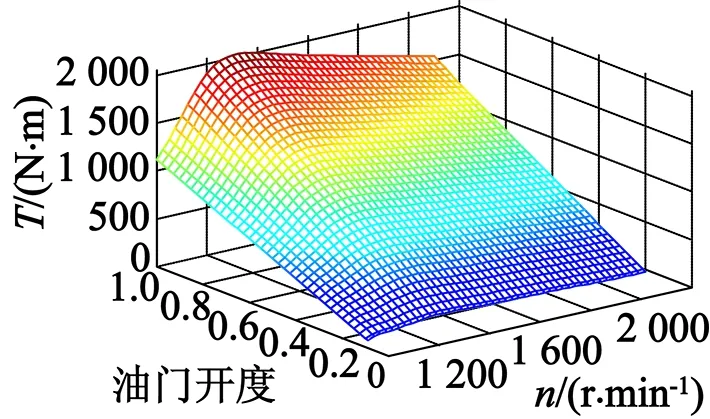
图4 转速-油门开度-转矩关系
1.2 发动机动态模型
在发动机稳态模型的基础上,用发动机转矩方程描述发动机在各工作点间的调整过程,两者相结合可构成发动机动态模型。
(1)
式中:T为轴输出转矩;Tem为发电机电磁转矩;T0为空载转矩;J为转动惯量;D为发动机轴的摩擦系数。
图5为发动机模型。与发动机实际调速控制相同,通过速度闭环PID控制器调节油门大小,实现对发动机转速的控制,跟踪给定转速。τ为控制系统的响应时间。

图5 发动机模型
1.3 发动机模型测试
在恒定负载条件下,测量发动机目标转速阶跃变化时的转速调整时间,仿真和实验结果对比如表1 所示。
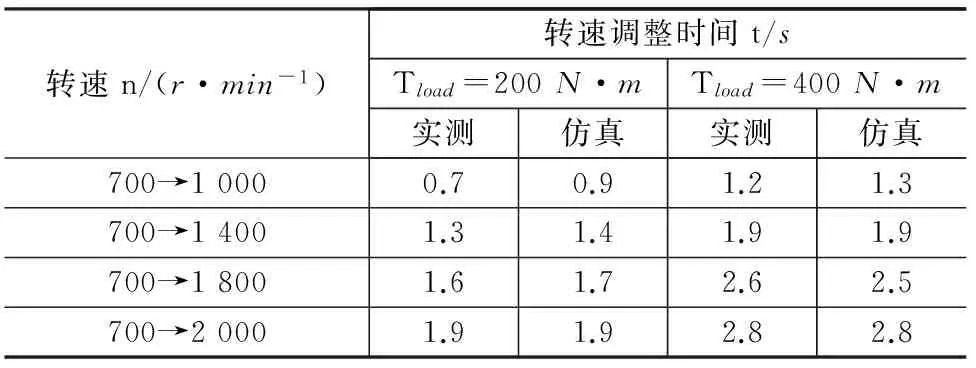
表1 仿真与实验结果对比
由表1可知,发动机转速调整时间仿真值与实测值差值基本上在0.1s以内,在可接受范围之内。
2 发电机建模
2.1 发电机模型
发电机为永磁同步发电机,为更加准确地体现发电机运行特性,考虑电动机参数时变特性,建立在旋转坐标系下的永磁同步发电机数学模型[7]:
(2)
式中:Ud,Uq,id,iq,Ld,Lq分别是定子电压、电流、电感的d,q轴分量;p为极对数;ωr为电机的电角速度;ψf为转子磁链;Tem为电磁转矩。f1,f2为电感Ld,Lq与直交轴电流id,iq的函数。
在实际运行中,定子电流增大会引起磁路饱和,导致交直轴电感发生变化,如图6所示,致使电机实际转矩与不计饱和情况下的输出转矩存在差异。
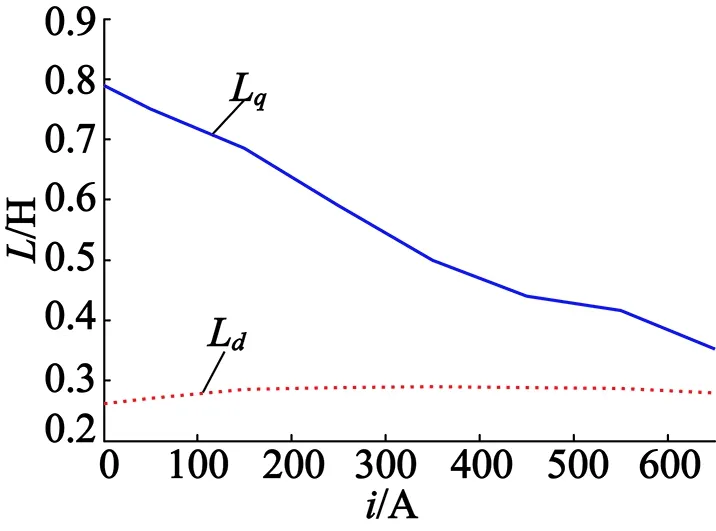
图6 交直轴电感与电流关系
通过有限元仿真获得考虑磁链饱和情况下的发电机最大转矩和交直轴电流关系,如图7所示,用于最大转矩电流比(MPTA)控制。
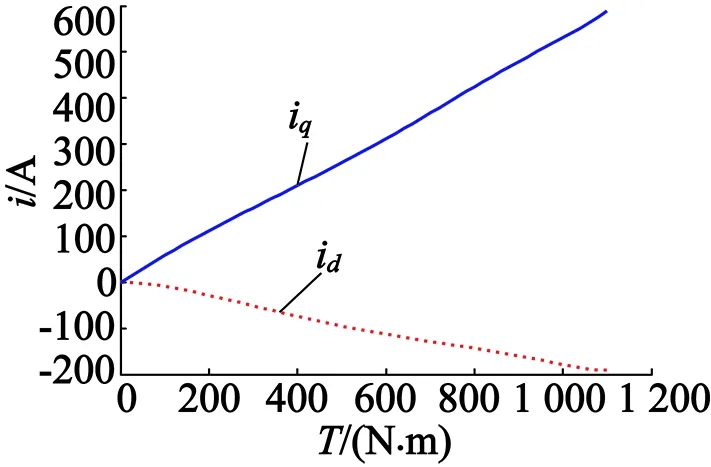
图7 最大转矩和交直轴电流关系
2.2 发电机控制方案
图8为发电机稳压控制方案。发动机起动后,发动机调速至怠速800 r/min,发电机开始调压发电,此过程中转速较低,不需进行弱磁控制,采用MTPA控制策略。发电时采用双闭环控制模式,电压外环,电流内环,实现对直流侧母线电压的控制;当电机转速过高时,电机反电势增加,为了控制母线电压,采用电压反馈弱磁控制策略。

弱磁控制方案如图8中弱磁控制模块所示。矢量控制输出的d,q轴参考电压被反馈回来,其幅值与电压限值进行比较,当其小于电压限值时,弱磁模块不起作用。当其大于电压限值时,PI4被激活,得到d轴电流偏移量,增大弱磁电流。d轴最大弱磁电流为电机短路电流。弱磁时,修正q轴电流限幅,使电流幅值不超过电流限值。
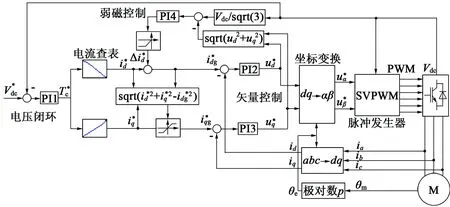
图8 发电机弱磁控制方案
3 仿真验证
3.1 模型验证
在发电机不控整流、空载模式下,控制发动机转速在0~1 500 r/min范围内(发电机反电势过高,因此为保证安全,控制发动机转速在1 500 r/min以内),记录整流器直流侧电压。在相同的转速给定条件下,测量发动机-发电机组模型不控整流时的直流侧电压,转速与整流器关系曲线如图9所示。
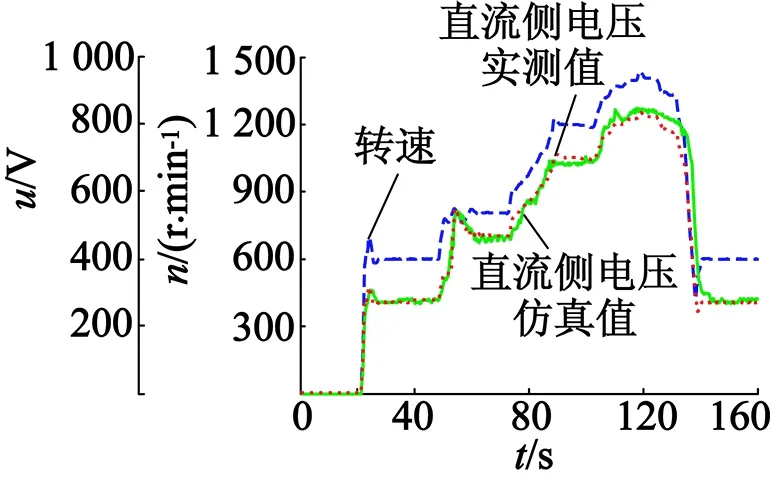
图9 不控整流时转速与直流侧电压关系
由图9可知,不控整流模式下,发电机整流器直流侧电压随转速的增大而增大,当转速为1 400 r/min时,直流侧电压达到了约830 V。在相同转速给定下,整流器直流侧电压仿真值与实测值变化趋势相同,两者比较接近。
同时,在800 r/min和1 200 r/min时发电机交流侧AB相线电压实测值与仿真值对比结果如图10所示,AB相电压仿真值与实测值接近但存在一定误差,这一误差是直流侧电压不同的主要原因,引起这种误差的因素可能是:模型的简化,模型参数与实际参数存在误差。然而,线电压和直流侧电压仿真值与实测值差距不大,在可接受范围内。
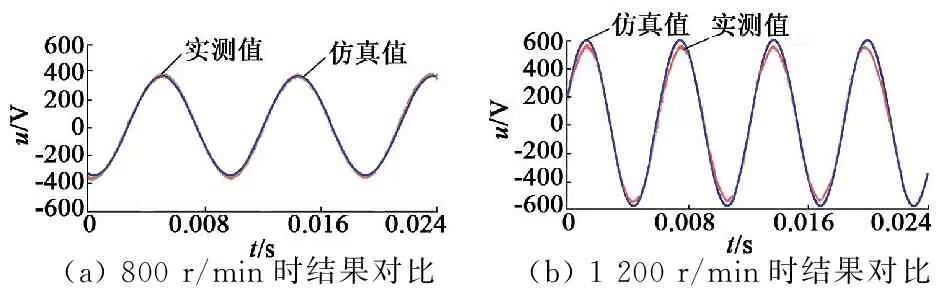
(a)800r/min时结果对比(b)1200r/min时结果对比
图10AB相线电压实测值与仿真值对比
3.2 控制方案验证
发动机-发电机组及其控制系统实物台架试验条件:发电机整流器在800 r/min以上转速可控整流发电,800 r/min以下不控整流;可控整流时目标电压750 V;发动机转速在0~2 100 r/min范围内变化;直流侧负载为电阻箱。采用相同的试验条件进行发动机-发电机组及其控制系统模型仿真,试验结果及对比如图11所示。

(a)转速变化曲线(b)负载电流及直流侧电压
图11 实测与仿真结果
由图11可知,电机转速在允许范围内变化以及在相同的负载变化条件下,模型和实物样机都能实现750 V稳压功能。台架试验中最大负载91 kW时,直流侧电压波动±5 V,仿真中直流侧电压波动±4 V。仿真中的交轴和直轴电流如图12所示,其变化趋势与实际相符。
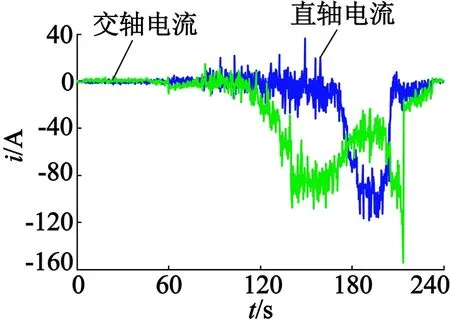
图12 交/直轴电流变化曲线
上述不控整流和可控整流试验分别证明了建立的发动机-发电机模型的可靠性以及发电机控制系统模型的可靠性。
4 结 语
本文立足于解决电传动装甲车辆发动机-发电机组建模难题。建立了发动机动态模型与发电机变参数数学模型,完成稳压发电和弱磁控制方案设计。仿真结果与台架试验数据对比表明,建立的发动机-发电机组模型精度较高,能够满足研究需求,为进一步开展多动力源优化控制研究奠定基础。
[1] 廖自力,马晓军,臧克茂,等.全电战斗车辆发展概况及关键技术[J].火力与指挥控制,2008,33(5):1-4.
[2] 孙逢春,张承宁.装甲车辆混合动力电传动技术[M].北京:国防工业出版社,2008:71-72.
[3] 李华.混合动力装甲车辆电驱动系统控制策略研究与仿真[D].北京:装甲兵工程学院,2006.
[4] 刘春光,初华.战车电传动能量管理策略研究[C]//全电战斗车辆发展趋势及关键技术研讨会论文集.金华:全电战斗车辆技术研讨会,2010:55-57.[5] 刘秋丽,刘春光.电传动车辆发动机建模方法[C]//全电战斗车辆发展趋势及关键技术研讨会论文集.金华:全电战斗车辆技术研讨会,2010:477-478.
[6] 张乃亮,阎平宽.神经网络与模糊控制[M].北京:清华大学出版社,1998:10-12.
[7] 严干贵,魏治成,穆刚,等.直驱永磁同步风电机组的动态建模与运行控制[J].电力系统及其自动化学报,2009,21(6):34-38.
Modeling and Simulation Research on Engine-Generator Set for Electric Drive Armored Vehicle
LIUChun-guang1,XIANGYu1,LIUYue-zhan2
(1.Key Laboratory of All-Electric Technology,Academy of Armored Force Engineering,Beijing 100072,China 2.Maji Agricultural Service Station,Fuyang 236600,China)
Engine-generator set is the core component of electric drive armored vehicle, establishing its simulation model is of great significance for electric drive technology research, but its strong nonlinear characteristics have greatly increased the difficulty of modeling and simulation. In this paper, by the combination of the experimental data and the control theory the engine steady state model was established. Based on time-varying parameters to establish the generator simulation model was established, and the rectifier voltage regulator and weak magnetic control scheme were designed. Simulation and bench test verify the feasibility of the model.
electric drive armored vehicle; engine-generator set; modeling and simulation
2016-01-18
TM351
A
1004-7018(2016)06-0010-03
猜你喜欢
山东冶金(2022年4期)2022-09-14
物流技术与应用(2022年8期)2022-08-26
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
物流技术与应用(2020年4期)2020-05-06
中国自行车(2018年8期)2018-09-26
制造技术与机床(2017年3期)2017-06-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
新疆钢铁(2015年3期)2015-02-20