
高动态通信接收机载波同步技术研究
2016-11-23 08:30吴必旗
无线互联科技 2016年20期
吴 健,崔 森,吴必旗
(南京熊猫汉达科技有限公司,江苏 南京 210014)
高动态通信接收机载波同步技术研究
吴健,崔森,吴必旗
(南京熊猫汉达科技有限公司,江苏 南京 210014)
高机动性造成的多普勒效应给高机动平台的无线通信产生较大的多普勒频偏和多普勒频偏变化率,严重影响接收机的相干解调性能。文章通过对高动态信号、三阶锁相环和二阶锁频环进行建模仿真分析,提出了FLL和PLL辅助结合的解调方式方案,能够满足捕获及时性与跟踪精确性要求。
无线通信;高动态;接收机;载波同步
1 实际通信系统存在的问题
在实际通信系统中,造成频率偏移的原因主要有:(1)接收端接收机本振不稳定引起的频偏[1];(2)发送端发射机的载频( 包括载频发生器和本振信号)不稳定引起的频偏;(3)信道传输中多普勒效应引起的频偏在接收端产生的偏移。这些频偏将会对接收数据造成严重的影响。通信系统中常用到相干解调,而相干解调的关键是恢复出与载波同频同相的相干载波[2]。高动态环境下,不仅有多普勒频偏,而且多普勒频率变换率很大,接收机的载波同步难度非常大。
2 高动态信号建模
高机动通信系统中存在着较大的加速度及加加速,在卫星通信系统中,卫星和载体的相对运动可用下面公式表示[3]。
初始速度用v0表示,卫星和载体之间相对的加速度和加加速度分别用a,b表示。如果存在较大的加速度和加加速度,则会出现多普勒频率偏移量,公式如下:

卫星和载体之间的相对速度用V表示,光速用C表示,载波频率用fcarr表示,多普勒偏差用fd表示,公式如下:

可以看出卫星和载体之间的高动态运动导致较大的多普勒,这对调制解调系统中的载波跟踪造成巨大的影响。
3 锁相环的建模分析
3.1高动态载波跟踪同步能力分析
锁相环跟踪解调系统框图如图1所示。
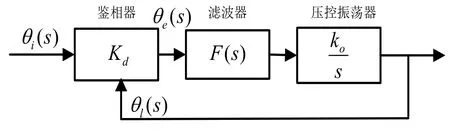
图1 锁相环系统框图
图1中,鉴相增益表示为Kd(V/Rad),压控振荡器的增益表示为Ko(Rad/V)。
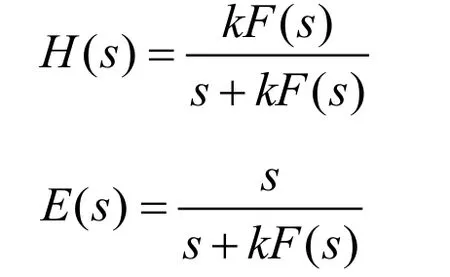
从图1可得环路的系统函数以及误差传递函数:
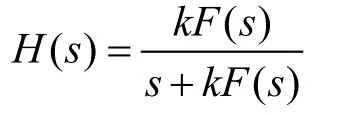
相位误差函数的传递函数为:
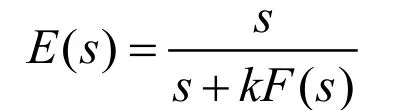
其中k是环路总增益,k=kd×k0。
通常选取二象限反正切鉴相器,因为这种的鉴相器具有很好的鉴相性能。
3.2高机动载体接收信号载波同步分析
高机动运动载体的运动状态整体分成2种,相对匀速运动和相对加速度运动。
相对匀速运动时,输入信号(零中频)为频率阶跃信号,输入信号相位θi=ωtu(t),进行拉普拉斯变换后利用三阶锁相环(Phase Locked Loop, PLL)对该信号进行稳定跟踪后,由终值定理可得稳态后误差为:

当F(s)为二阶滤波器(PLL环为3阶)时,θe,∞=0。

当F(s)为二阶滤波器(PLL环为3阶)时,θe,∞=0。
图2—3为假设多普勒变化率为7 kHz/s时,业务速率为2.4 kbps,信噪比为CNR=70 dB,环路带宽Bn=18 Hz时三阶PLL环跟踪性能。
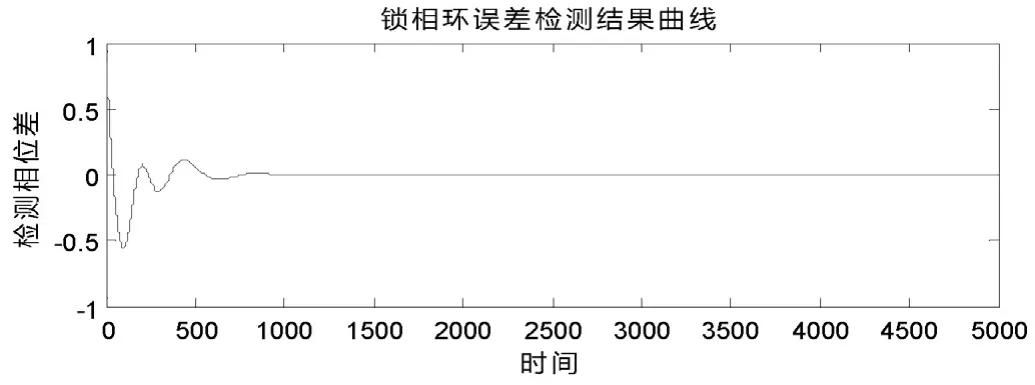
图2 锁相环误差检测结果曲线
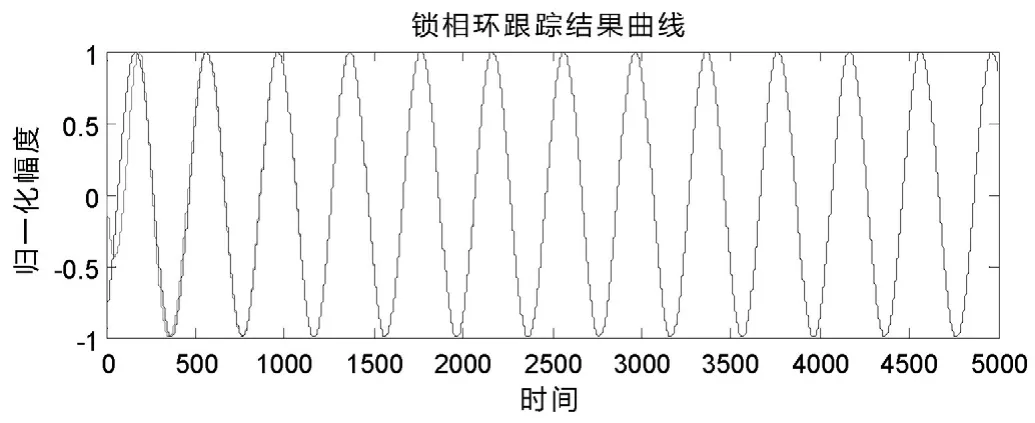
图3 锁相环跟踪结果曲线
从以上分析可以看出,3阶PLL环具有跟踪大动态运动状态载波跟踪能力。
4 锁频环建模
锁频环(Frequency Locked Loop, FLL)的拉普拉斯域系统框图如图4所示。
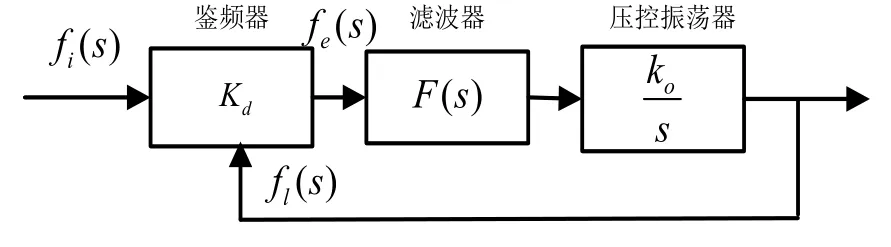
图4 FLL系统框图
其中,鉴相增益表示为Kd(V/Hz),压控振荡器的增益表示为Ko(Rad/Hz)。FLL的阶数决定了FLL的跟踪性能。
从图4可得环路的系统函数以及误差传递函数:
其中k是环路总增益,k=kd×k0。
当载波环路常用的2阶锁相环为例(即环路滤波器为1阶)时,F(s)可以表示为:
其中的τ1、τ2是滤波器的滤波系数。误差传递函数可以为:
鉴频器一般采用选用四象限反正切鉴频器,这是一种最大似然估计器,其频率牵引范围为,在高低信噪比下都具有比较好的鉴别性能。但在实际工程化中,一般采用改进的反正切鉴频器,即反正弦频偏估计鉴频器,其频率索引搜索范围与四象限反正切鉴频器索引范围相同。
相对匀速运动时,输入信号为频率阶跃信号,在载体接收到的信号频率为f0u(t),其拉普拉斯变换为利用二阶FLL对该信号进行稳定跟踪后,由终值定理可得稳态后误差为:

图5—6为假设多普勒变化率为7KHz/s时,业务速率为2.4 kbps,信噪比为CNR=70 dB,环路带宽Bn=5 Hz时二阶FLL环跟踪性能。
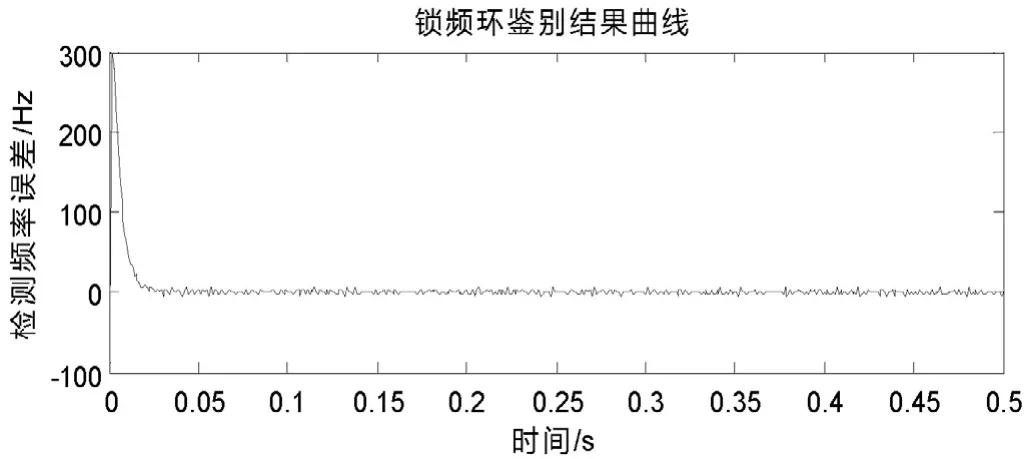
图5 锁频环鉴别结果曲线
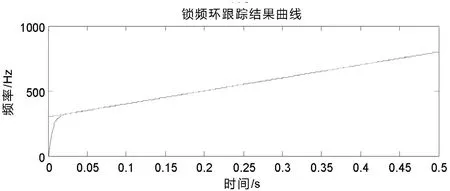
图6 锁频环跟踪结果曲线
从以上分析可以看出:2阶FLL载波跟踪环能以零稳态误差跟踪加速度引起的频率斜率升信号。
5 结语
在低动态的通信系统中,采用锁相环(PLL)能够带来较好的抗噪声性能和较好的解调精度性能。可是,当有着较大的多普勒频偏情况下,只有增加环路带宽才能对载波进行跟踪解调。此时,由于环路带宽的增加,导致混入更多的噪声,这样跟踪精度又会被降低。相反,如果只是用锁相环(FLL)进行跟踪解调,虽然能够具有较好的动态适应性能,但是跟踪精度上往往达不到要求。
高动态接收机载波跟踪环路通常采用锁频环(FLL)和锁相环(PLL)来结合实现。锁相环PLL估计输入信号的准确频率和相位完成载波与数据的剥离,锁频环FLL则用复现近似的频率以完成载波的同步。由于锁频环FLL具有良好的抗动态应力性能,而且对于I和Q支路信号的180°翻转不敏感,因此在初始同步时,锁频环FLL比锁相环PLL更容易保持载波频率的锁定。DuLL工作在FLL工作模式。等到FLL锁定了以后,DuLL切换至FLL和PLL相结合的工作模式;在实时解调的过程中,还可以进行实时监测动态调整。即发现当前动态变小,则可切换DuLL至PLL模式,这样能够带来更好的跟踪精度。
[1]沈锋,徐定杰,薛冰.基于FLL/PLL相结合的载波跟踪在导航接收机中的应用[J].中国航海,2004(2):51-54.
[2]黄振,陆建华,杨士中.卫星通信中多普勒频移的快速捕获[J].电子学报,2003(7):1052-1056.
[3]刘高,黄国策,袁小刚.移动卫星通信信道多普勒频移特性研究[J].信息技术,2006(9):19-21.
Research on carrier synchronization technology of high dynamic communication receiver
Wu Jian, Cui Sen, Wu Biqi
(Nanjing Panda Handa Electronic Co., Ltd., Nanjing 210014, China)
Large Doppler frequency offset and Doppler frequency shift rate on wireless communication of high mobility platform for moving terrace from Doppler effect caused by high motility, seriously influencing coherent demodulation.This paper puts forward a demodulation scheme of aided combination of FLL and PLL through modeling and simulation, and making analysis of high dynamic signal, three order and two order frequency locked loop PLL, the scheme can be able to meet the requirement of timeliness and tracking accuracy.
wireless communication; high dynamic; receiver; carrier synchronization
吴健(1978— ),男,江苏盐城;研究方向:卫星通信领域设计。
猜你喜欢
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
电子测试(2018年14期)2018-09-26
上海公路(2018年4期)2018-03-21
电测与仪表(2017年24期)2017-12-19
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
电测与仪表(2015年9期)2015-04-09
电测与仪表(2014年8期)2014-04-04
现代防御技术(2014年6期)2014-02-28
