
基于SOPC平台远程机器人控制系统的设计
2016-11-23 08:30黎会鹏
无线互联科技 2016年20期
黎会鹏,冯 杰
(黄冈师范学院 电子信息学院,湖北 黄冈 438000)
基于SOPC平台远程机器人控制系统的设计
黎会鹏,冯杰
(黄冈师范学院 电子信息学院,湖北 黄冈 438000)
本设计基于SOPC嵌入式平台,提出了机器人远程控制系统的初级方案。该系统的硬件由DE1-SoC控制板、WiFi无线节点模块和履带机器人驱动电路等组成。软件基于Altera公司的Qsys平台,根据需要搭建控制器和外设框架,利用C语言采取模块化编程,驱动外围硬件电路,实现了机器人的运动控制。
SOPC;DE1-SOC;WiFi;Qsys
可编程片上系统(System on a Programmable Chip,SOPC),它是用可编程逻辑技术把整个系统集成到一块硅片上,用于嵌入式系统的研究和电子信息处理。它具有灵活的设计方式,可裁减、可扩充、可升级,并具备软硬件在系统可编程的功能。
无线网络技术飞速发展进一步促进了网络技术在机器人的控制领域的应用,基于网络的机器人控制技术也从初期的遥操作机器人的应用逐步扩展到分布式机器人系统等研究领域。
1 系统方案
机器人远程控制系统的本质是人机之间,以及机器设备之间的协同和合作,机器人控制设计采用ALTERA公司的Cyclone V FPGA芯片平台,基于Nios Ⅱ嵌入式处理器进行设计。该处理器是具有32位指令集的第二代片上可编程的软核处理器, 其最大优势和特点是模块化的硬件结构, 以及由此带来的灵活性和可裁减性。
机器人作为网络数据的连接终端,将WiFi节点模块通过AT指令配置,连接到服务端,建立数据链路。此时,服务端的控制指令可以通过WiFi传送到单机器人平台。平台根据指令译码程序,调整机器人运动方向和机械臂动作。
1.1控制端
监控中心采用C/S架构,完成客户端登录信息的监听,待客户机登录后,通过以太网进行通信。操作员通过控制界面可以在对该系统进行操作,也可通过板载的按键或重力传感器检测倾角对机器人的运动进行控制。
1.2无线通信的实现
本设计采用WiFi联网方式在客户端和服务器端进行数据交换,WiFi是一种无线联网技术,能够将个人电脑、手持设备(如pad、手机)等终端以无线方式互相连接 。
1.3控制终端
机器人连接WiFi智能控制终端,终端设置成客户机模式,上电后监测服务器状态,申请连接。接收服务器端的操作指令,经过指令译码后控制各执行机构动作,执行机器人的速度控制以及前进、后退、转弯控制、六自由度机械手的操作。
2 系统硬件总体设计
整个控制系统主要包括电源、控制器、存储系统、电机驱动电路、WiFi网络通信接口等资源。
机器人控制采用友晶科技的DE1-SoC开发板进行设计,该硬件采用ALTERA公司的Cyclone V FPGA芯片为控制核心,通过AT指令配置WiFi节点模块为STA模式,设置链路网络信息和通信端口。根据接收到的服务端的指令,控制相应的驱动电路,完成机器人的运动控制,控制系统结构框图如图1所示。
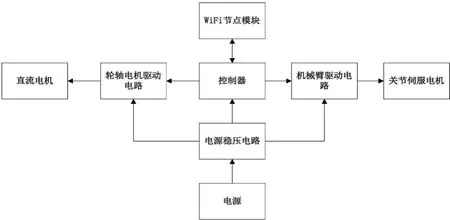
图1 机器人结构框图
2.1无线模块
本设计选用汇承科技推出的全新HC-21(S2WM02WiFi)模块,是基于UART接口的符合WiFi无线网络标准的嵌入式模块,内置无线网络协议IEEE802.11协议栈以及TCP/IP协议栈, 能够实现用户串口数据到无线网络之间的转换。
2.2电机驱动器
机械手伺服电机驱动器选用parallax公司的Servo Controller模块,用于驱动控制Hitec公司的HS-645MG大扭矩舵机,完成机械手的操作。
2.3六自由度机械手
机械手为德普斯机械手,它主要由执行机构、驱动系统、控制系统以及位置检测装置等组成。该机械手由6个伺服电机作为动力系统,其构造仿生于人类的手臂,能够灵活地全方位转动,完成各项命令。
2.4车体动力部分
本系统主要采用履带结构,共有4组直流伺服电机驱动轮。履带式机器人具有动载荷小,设计紧凑等特点。它能够平稳、迅速、安全地通过各种复杂路况。履带上有花纹,所以在雪、雨、冰、上坡等路面上能牢牢地抓住地面、不会滑转。
3 系统软件总体设计
Altera公司在QuartusII 11.0版本中就正式使用Qsys作为主要的SOPC工具,Qsys系统集成工具自动生成互联逻辑,能自动连接集成的知识产权(IP)功能和自定义子系统,从而显著节省了时间,减轻了FPGA开发工作量。与之前发行的SOPC Builder版本相比,提高了性能,增强了设计重用功能,更迅速的进行验证。
本设计根据设计需要,利用Qsys平台搭建了功能系统,主要包含了几个组件:NiosII Processor、onchip_ memory,timer,jtag_uart,uart和pio。系统架构如图2所示。外设中断号和和基地址有系统自动分配,也可根据设计本身进行修改。
系统软件基于eclipse平台进行设计和编译,采用C语言编程。
3.1初始化函数设计
系统正常工作前,将配置模块的外设资源进初始化,主要包括WiFi模块配置初始化、定时器初始化、舵机控制器初始化等操作。
3.2控制信息处理
机器人和控制端通过WiFi进行通信,通过软件监听WiFi模块接收的数据,根据解码协议定义功能函数,将控制命令转发给处理单元。
3.3机械手控制
根据控制单元转发的信息,驱动关节电机进行操作。
3.4车体运动控制
根据解码控制单元转发的信息,驱动车体直流驱动电机,进行相应的速度调节和位置控制。
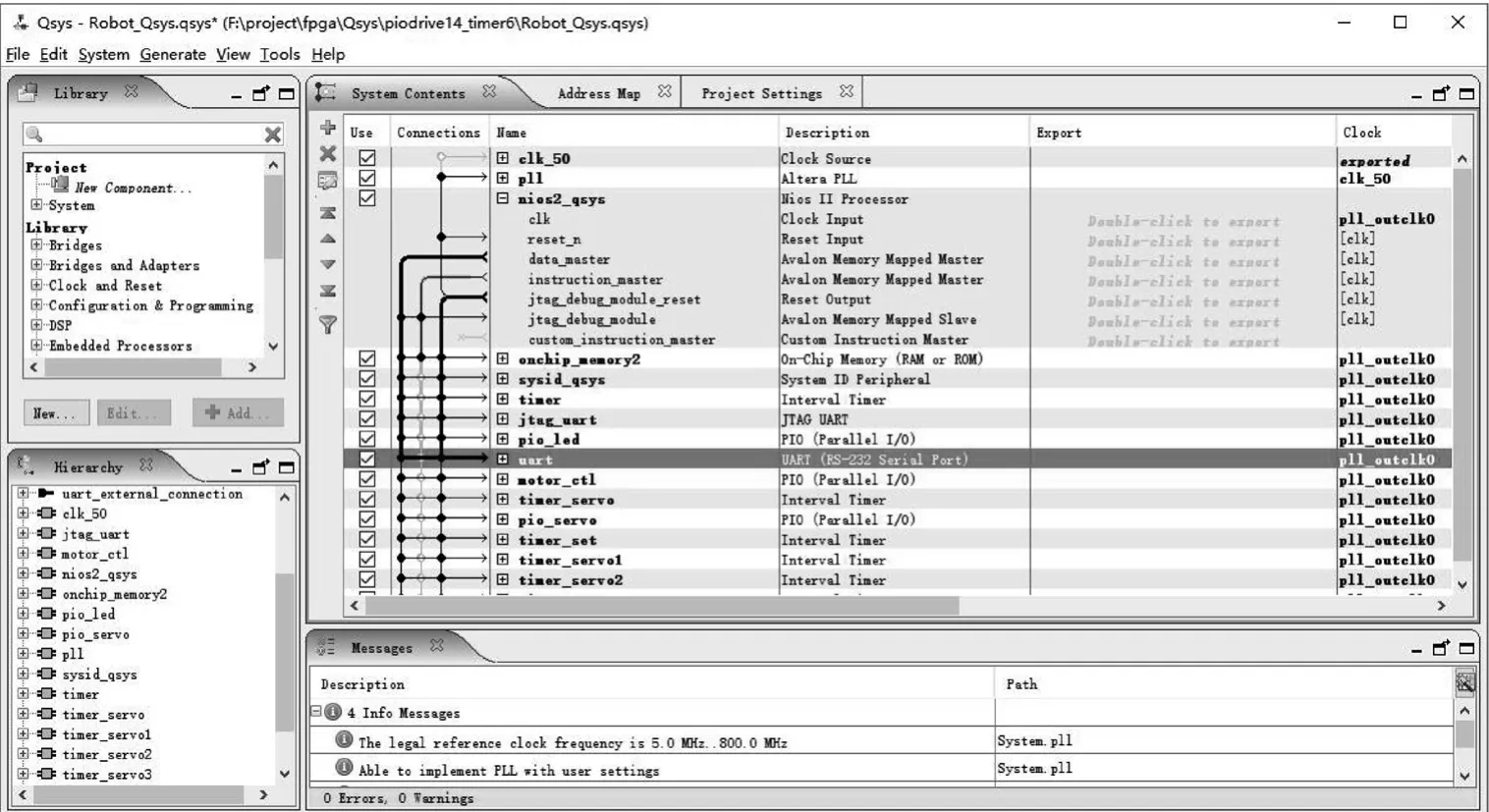
图2 Qsys系统框架图
4 结语
本设计围绕DE1-SOC平台应用展开研究,进行嵌入式现场控制器软硬件系统平台设计以及应用软件设计。将履带机器人作为对象,经过软硬件调试,机器人能正常工作,实现远程网络控制功能,可广泛应用于科研和教学领域。
[1]李贞妮,金硕巍,李晶皎,等.基于FPGA的SOPC设计实践教学方法探索[J].电气电子教学学报,2013(6):81-82.
[2]李芸,易志强,黄继业.EDA/SOPC实验教学方法探讨[J].高校实验室工作研究,2010(4):45-46.
[3]朱敏杰,潘张鑫,罗珩.电子信息工程专业“嵌入式系统”实践教学探索[J].电气电子教学学报,2012(1):67-69.
[4]周立功.SOPC嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2006.
[5]李兰英.NIOS II嵌入式软核SOPC设计原理及应用[M].北京:北京航空航天大学出版社,2006.
[6]冯志华,高社生.基于Ni∞Ⅱ软核处理器的阿M控制器设计[J].微处理机,2008(1):54-56.
Remote robot control system design based on SOPC platform
Li Huipeng, Feng Jie
(Electronic and Information School of Huanggang Normal University, Huanggang 438000,China)
A preliminary programme about robot remote control system is presented based on SOPC embedded platforms. The hardware of the system consists of DE1-SoC board, WiFi wireless node module and tracked robot driving circuit and so on. Software is based on Altera Qsys platform to build framework for controllers and peripherals according to demands, and using C language to modular programming and drive peripheral hardware, which fulfill the motion control of robots.
SOPC; DE1-SOC; WiFi; Qsys
黄冈师范学院转型发展项目;项目编号:zxfz2016B008,zxfz2016A014。
黎会鹏(1981— ),男,湖北荆门,硕士,讲师;研究方向:嵌入式系统设计。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2018年2期)2018-04-18
电镀与环保(2016年3期)2017-01-20
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年1期)2016-04-16
机电信息(2015年3期)2015-02-27
单片机与嵌入式系统应用(2014年9期)2014-03-11
自动化博览(2014年4期)2014-02-28
