
焊缝跟踪RBF整定PID控制算法
2016-11-23 04:01黄有概高向东
电焊机 2016年1期
黄有概,高向东
焊缝跟踪RBF整定PID控制算法
黄有概,高向东
(广东工业大学机电工程学院,广东广州510006)
针对电弧焊接系统,研究一种基于径向基神经网络与比例积分微分控制相结合的焊缝跟踪控制新方法。在建立基于视觉传感的电弧焊焊缝跟踪系统的基础上,分析系统运动机构原理并研究两相混合式步进电机驱动焊炬运动数学模型,结合研究对象进行计算机仿真研究。试验结果表明,基于径向基整定比例积分微分的控制方法能够有效提高焊缝跟踪性能。
焊缝跟踪;混合式步进电机;RBF神经网络;PID控制
0 前言
焊接是一个非常复杂的过程,影响焊接的因素具有不确定、非线性的特点。在电弧焊过程中,准确地识别焊缝位置和精确的焊缝跟踪是保证焊接质量的前提[1]。常规PID控制器结构简单、算法实用、控制效果良好,大量应用于工业过程控制中。但是,对于工程实际中多输入多输出系统,系统内部的关联耦合以及对象参数的复杂性与不确定性,导致了常规PID控制系统控制效果不理想。因此,在焊缝自动跟踪系统中采用经典控制的理论和方法进行控制,在实际焊接生产中往往得不到令人满意的结果。为了使控制器具有较好的自适应性,实现控制器参数的自动调整,采用神经网络控制的方法。径向基(RBF)神经网络是一种具有单隐层的三层前馈网络,它模拟了人脑中局部调整、相互覆盖接受域的神经网络结构,是一种局部逼近网络,能以任意精度逼近任意非线性函数[2]。文献[3-4]采用RBF神经网络来辨识非线性系统,自适应整定PID参数以实现对复杂系统的控制,结果显示比常规PID控制具有超调量小、较强的鲁棒性和适应性。利用RBF神经网络的自学习能力这一特性,并结合传统的PID控制理论,构造RBF神经网络PID控制器,实现控制器参数的自动调整。针对弧焊过程中焊缝跟踪控制的这一难点,设计了一种基于RBF神经网络与传统PID控制相结合的新策略。通过对电弧焊控制系统进行分析和数学建模,对其控制性能进行试验分析,提高控制能力和跟踪精度。
1 电弧焊焊缝跟踪控制系统
试验采用钨极惰性气体保护焊GTAW(Gastungsten arc welding)焊接方式,试验装置是基于视觉传感器CCD(Charged coupled decvice)的电弧焊焊缝跟踪系统。视觉传感器在弧焊机器人智能化控制技术中起关键作用[5]。如图1所示,CCD传感器安装在焊枪行进方向的前面,用于获取焊件待焊区域图像信息,经系统图像处理后得到焊枪行走路径。试验装置主要由以下部分组成:机架平台、步进驱动模块、步进电机、图像采集模块、CCD摄像机、继电器控制模块、工控机、焊接系统。

图1 基于视觉传感的焊接控制系统
焊接过程某一时刻CCD传感器采集到的图像如图2所示,相对应的焊后焊缝图像如图3所示。

图2 GTAW焊接采集的焊接区图像
2 步进电机数学模型
试验系统平台有底座x轴、底座y轴、龙门架x轴和龙门架y轴四个轴。各轴均采用滚珠丝杆螺母机构传动,龙门架两轴构成与工作台平面相垂直的平面运动,主要控制焊炬和CCD的位置,实现焊炬的快速定位。底座x、y轴是控制工作台和焊件的运动,y轴控制工作台的进给运动,x轴主要用于纠偏。在焊缝跟踪系统中,CCD传感器与焊炬刚性连接,因此焊接前通过检测焊缝中心位置即可得到焊缝中心与焊炬的偏差[6]。

图3 GTAW焊后采集的焊件图像
建立二相混合式步进电机的数学模型是对自动电弧焊控制系统进行分析和研究的前提。由于步进电动机是一类高度非线性的装置,要得到其模型的精确描述以及参数的精确测定都比较困难。因此,在研究二相混合式步进电动机时做了如下简化和假定:在不计定子极间和端部的漏磁、不计永磁体回路的漏磁、忽略磁滞和涡流的影响、忽略饱和的影响、忽略定子线圈自感的谐波分量等影响的情况下,对其数学模型进行分析[7]。
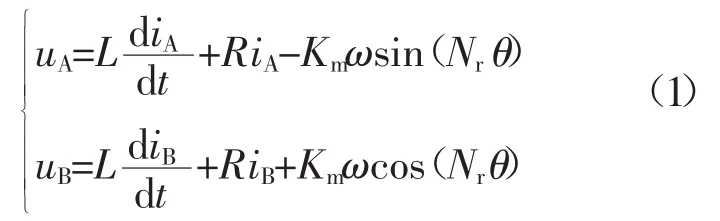
电压平衡方程为
转子力矩平衡方程为

转速与角度关系方程为

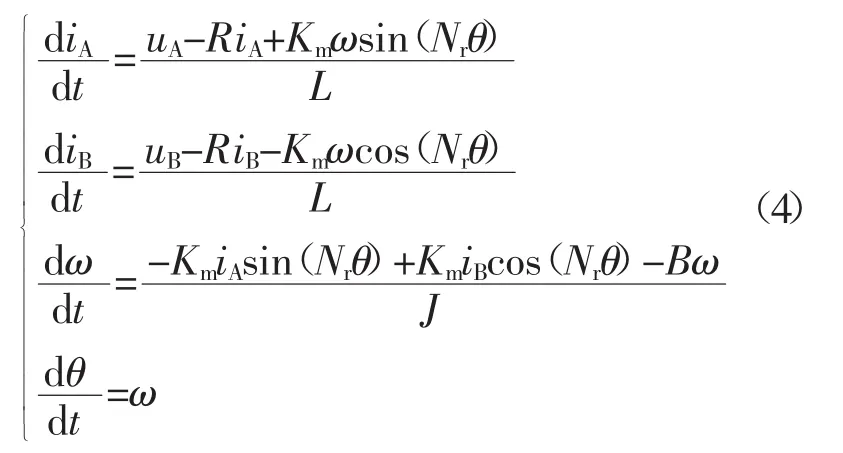
式中uA、uB及iA、iB分别为两相的电压和电流;R和L为绕组电阻和电感;θ,ω,Km,Nr分别为电动机的转动角度及角速度、反电动势系数及转子齿数;Te,J,B,TL为混合式步进电动机的电磁转矩、转动惯量、粘滞阻尼系数及负载转矩。
式(1)~式(3)组成两相混合式步进电机的数学模型,其微分方程形式为[7]
同时也可以用传递函数形式表示为[8]

3 RBF神经网络PID控制
RBF神经网络PID控制是RBF神经网络应用于PID控制并与传统PID控制相结合而产生的一种新型控制方法。与BP网络相比,径向基网络是一种三层前向网络,由输入到输出的映射为非线性,而隐含层空间到输出空间的映射为线性,可加快学习速度并避免局部极小问题[9]。
在RBF网络结构中,输入向量为X=[x1,x2,…,xn]T,设RBF网络的径向基向量为h=[h1,h2,…,hm]T,其中hj为高斯基函数[2]

式中cj为网络第j个节点的中心矢量的变量;bj为节点j的基宽度参数且大于零。
辨识网络的输出为

式中wj为网络权向量的变量。
辨识器的性能指标函数为

式中y(k)为网络的输出。
基于RBF神经网络的PID自适应控制系统原理如图4所示。由神经网络在线辨识得到梯度信息,PID参数根据梯度信息在线调整,适应系统参数的变化,使系统的控制品质得到改善。
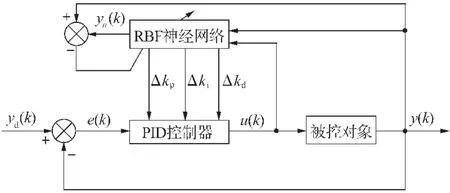
图4 基于RBF神经网络整定PID原理
在电弧焊焊缝跟踪系统中,被控对象包括二相混合式步进电机、运动工作台和焊件等。试验选用二相混合式步进电机的步距角为1.8°,驱动器细分倍数为8,底座平台x轴滚珠丝杠螺距1 mm,x轴步进电机的脉冲当量可根据式(9)计算

同时可知,位移y(k)与电动机转角θ之间的关系可表示为y(k)=θ/360。
基于RBF神经网络整定的PID控制原理如下[2]。
PID控制器采用增量式算法,控制误差为

式中yd(k)和y(k)分别为输入和输出。
控制器PID的三项输入分别为

则PID控制算法为[2]

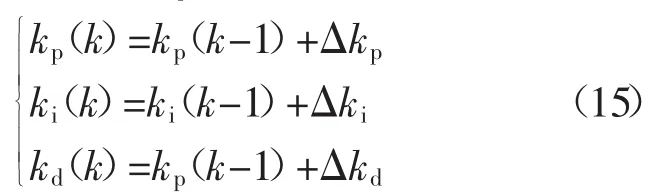
系数kp,ki,kd由RBF神经网络进行整定,整定性能指标函数为

由梯度下降法得到kp,ki,kd的调整公式为
式中
4 焊炬运动控制算法仿真
试验选用二相混合式步进电动机,转子齿数Zr=50,额定电流I=3 A,静转矩1.25 N·m,起动转矩6.8 N·cm,绕组电阻R=1.1 Ω,绕组电感L=1.7 mH,电机的转动惯量为3.4×10-7kg·m2,负载转动惯量为2.85×10-6kg·m2,粘滞阻尼系数B=0.03 kg·m2/s。
根据式(5)并考虑到负载,相应被控对象的传递函数为

采样时间为1 ms,采用Z变换对G(s)进行离散化,经过Z变换后的被控对象为

式中num和den为离散化系数。
在RBF网络中,网络辨识的三个输入为:y(k)、y(k-1)、Δu(k),网络的学习速率均为0.45。为了比较RBF神经网络PID和普通PID的控制效果,分别对两种控制算法进行阶跃信号跟踪仿真,仿真中取系统的输入信号为1的阶跃信号,仿真结果如图5所示。
由图5可知,RBF神经网络整定PID控制与传统PID控制相比,调节速度快、调整时间短,说明该算法具有更好的控制特性。
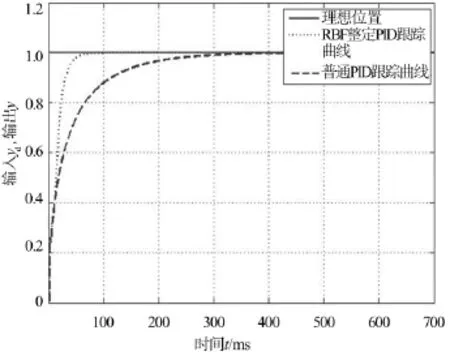
图5 两种不同方法的电机控制系统PID控制曲线
5 结论
研究了基于两相混合式步进电机的位置闭环控制系统,并对焊缝位置的跟踪采用RBF神经网络整定PID的控制策略。由试验结果可知,RBF神经网络PID控制的响应效果较传统的PID控制迅速、稳定,有效地改善了步进电动机控制系统的动态性能。将基于RBF神经网络PID控制器应用于电机控制系统的PID参数寻优中,解决了普通PID控制器在控制时变、非线性系统中所出现的问题,为电弧焊焊缝跟踪系统的控制提供了一条新的思路。
[1]高向东,罗锡柱.基于卡尔曼滤波的焊缝检测技术研究[J].机械工程学报,2004,40(4):172-176.
[2]刘金琨.先进PID控制MATLAB仿真(第3版)[M].北京:电子工业出版社,2011.
[3]高向东,莫玲.焊缝偏差RBF神经网络预测算法[J].焊接学报,2011,4(33):1-5.
[4]WeiqiangYue,ShuxingFeng,QiangZhang.AnAuto-adaptive PID Control Method Based on RBF Neural Network[A].2010 3rd InternationalConferenceonAdvancedComputerTheory and Engineering[C].Chengdu:IEEE,2010.
[5]陈华斌,黄红雨,林涛,等.机器人焊接智能化技术与研究现状[J].电焊机,2013,43(4):8-15.
[6]陈章兰,高向东.基于视觉传感的焊缝中心检测技术研究[J].电焊机,2005,35(2):58-61.
[7]刘川,刘景林.基于Simulink仿真的步进电机闭环控制系统分析[J].测试技术,2009,28(1):44-49.
[8]周碧书.步进电机的传递函数研究法[J].微电机,1988(1):9-14.
[9]刘泽华,高亚奎.RBF-PID控制在防滑刹车系统中的应用研究[J].计算机仿真,2010,10(27):24-28.
Control algorithm of PID adjusted by RBF neural network for seam tracking
HUANG Yougai,GAO Xiangdong
(School ofElectromechanical Engineering,GuangdongUniversityofTechnology,Guangzhou 510006,China)
A new approach is proposed for seam tracking based on PID(proportion,integral,derivative)control adjusted by RBF(radial basis function)neural network during arc welding.After the establishment of seam tracking system based on machine vision,the movement mechanism of seam tracking system and mathematical model of hybrid stepping motor were analyzed.Then the computer simulation for seam tracking system was investigated.The experimental results showed that the performance of seam tracking could be promoted by the proposed algorithm based on the combination of PID and RBF neural network.
seam tracking;hybrid stepping motor;RBF neural network;PID control
TG409
A
1001-2303(2016)01-0014-04
10.7512/j.issn.1001-2303.2016.01.04
2014-12-20;
2015-10-07
广东省自然科学基金资助项目(10251009001000001);高等学校博士学科点专项科研基金资助项目(20104420110001)
黄有概(1985—),男,广东人,在读硕士,主要从事焊接自动化的研究。
猜你喜欢
建材发展导向(2021年6期)2021-06-09
精密成形工程(2020年4期)2020-08-05
纺织科学研究(2020年1期)2020-05-21
金属加工(热加工)(2020年12期)2020-02-06
制造技术与机床(2018年12期)2018-12-23
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年7期)2018-01-19
山东工业技术(2017年11期)2017-06-13
制造业自动化(2017年2期)2017-03-20
山东工业技术(2017年5期)2017-03-16
