基于AMT的自动换挡协调控制策略研究
2016-11-23 03:20张炳力周德明吴鑫平
合肥工业大学学报(自然科学版) 2016年9期
张炳力, 汤 波, 周德明, 吴鑫平
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
基于AMT的自动换挡协调控制策略研究
张炳力, 汤 波, 周德明, 吴鑫平
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
为了改善电控机械式自动变速箱(automated mechanical transmission,AMT)自动换挡品质,文章针对电机-变速器一体化电驱动系统的控制特点,在分析无离合动力传动系统自动换挡原理的基础上,制定了自动换挡协调控制系统框架和实现流程,提出了一种基于驱动电机转矩、转速双闭环控制的自动换挡协调控制策略。设定综合工况下的仿真试验表明,系统自动换挡协调控制策略正确、可靠,换挡品质较好。
电控机械式自动变速箱(AMT)系统;无离合;自动换挡;协调控制;驱动电机
在国家大力发展“绿色、节能、环保”新能源汽车的趋势下,深入研究纯电动汽车动力系统的集成驱动技术和自动换挡协调控制,开发汽车电驱动系统,有利于我国环境保护和能源安全,实现汽车工业领域人-资源-环境的可持续发展。电控机械式自动变速箱(automated mechanical transmission,AMT)自动变速系统有着成本低、效率高、控制方便等众多优势,但是由于其换挡过程依赖于同步环的滑摩结合,噪声冲击很大、换挡时间长,严重影响车辆换挡的平顺性和乘坐舒适性,因而实际运用受到很大的限制。
近年来,国内外学者在AMT电驱动系统的换挡协调控制方面做了大量的研究。文献[1]制定了混合动力系统中无离合AMT变速器的自动换挡实现方法,利用电机控制实现动力系统的协调换挡;文献[2]提出了取消离合器的AMT传动系统换挡控制方法,分析了AMT选挡、换挡伺服电机在换挡过程中的调速控制,开发了适用于纯电动客车的无离合多挡AMT;文献[3]对用于轻型电动汽车的电机-变速器集成驱动系统进行了研究,分析了汽车传动系统取消离合器的可行性,提出了基于2挡AMT的2参数换挡策略。
在关于无离合AMT电驱动系统的自动换挡控制中,对协调控制的机理和具体控制方法的研究较少。本文以纯电动汽车电机-变速器一体化电驱动系统中无离合2挡AMT为研究对象,对其自动换挡协调控制策略进行研究。
1 自动换挡原理及协调控制
1.1 自动换挡原理
在无离合电机-变速器一体化动力传动系统中,驱动电机与变速器之间取消了离合器,通过花键直接连接。运用等效集中质量法对系统进行简化,其传动系统动力学模型如图1所示。
无离合AMT电驱动系统在换挡过程中要求即将分离或啮合的齿轮副具有相同的线速度并达到无载状态,使摘挡或挂挡过程平稳无冲击,顺利完成换挡[4]。
传统AMT汽车在换挡过程中通过离合器的分离来切断整车动力传递,依靠同步环的滑摩完成同步过程,实现换挡。对于无离合AMT电驱动系统,由于驱动电机转子转动惯量小,转矩、转速响应快,可以通过对驱动电机的主动调节,即可达到无离合换挡条件,使齿轮副无载分离与啮合,
实现平顺换挡。
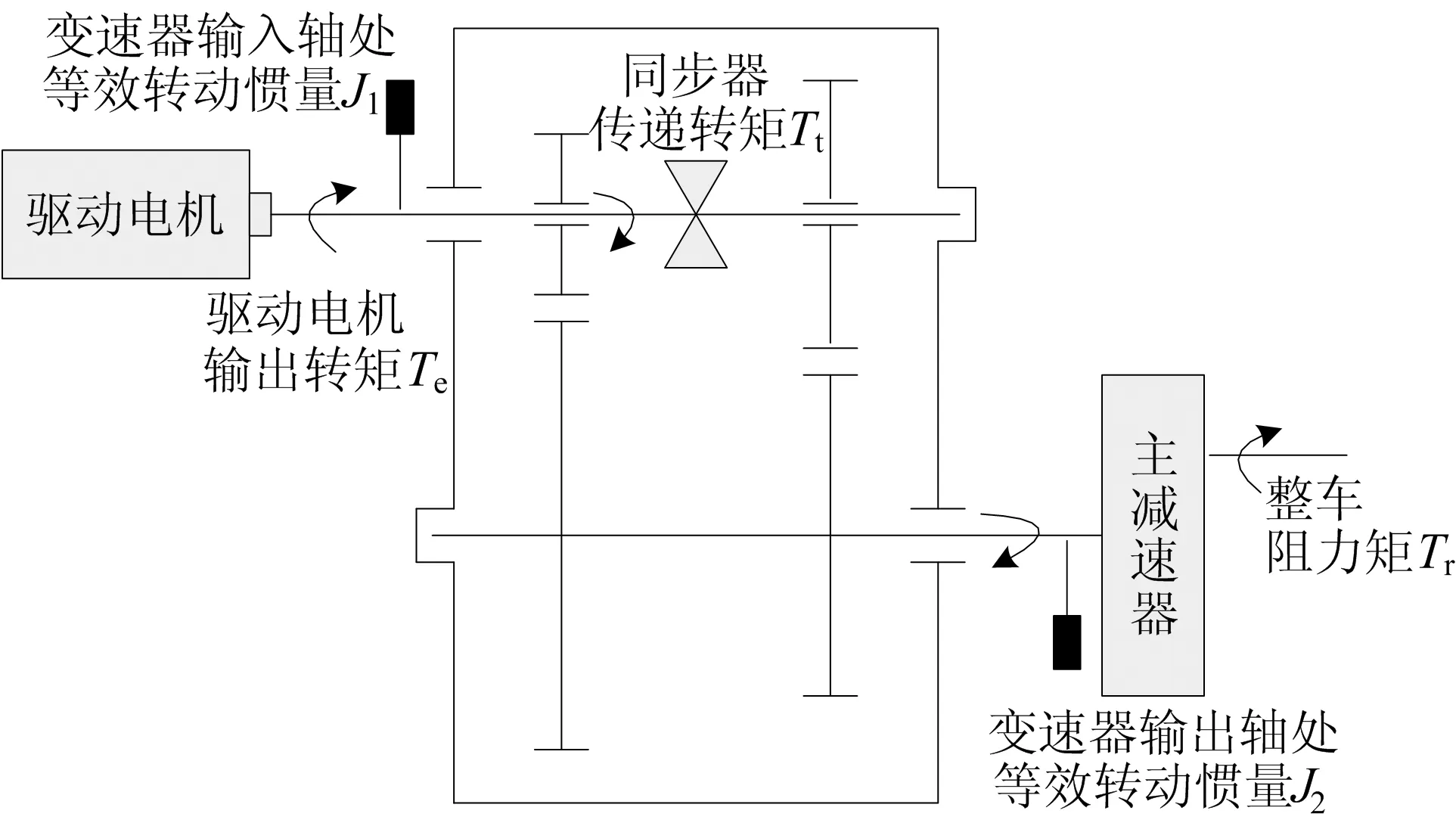
图1 整车传动系统动力学模型
1.2 自动换挡协调控制
在电动汽车自动换挡过程中,传动系统发生了一系列动态变化,如电机负载工况与空载工况的交替、变速器挡位变换(含同步器结合与分离)等。对于无离合AMT电驱动系统,自动换挡实现的关键在于对驱动电机、变速器及换挡执行机构进行协调控制。
根据自动换挡过程中具体控制方法的不同,可以将换挡过程分为卸载摘挡、同步挂挡和加载行驶3个阶段。自动换挡协调控制系统框架如图2所示。
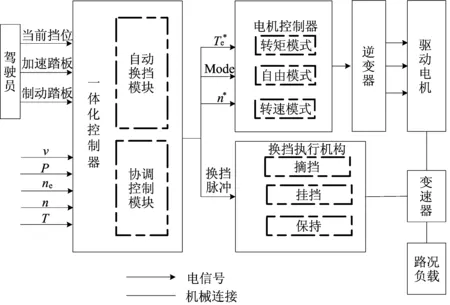
图2 自动换挡协调控制系统框架
在汽车行驶过程中,一体化控制器不断采集汽车行驶状态信息,结合驾驶员的操作意图,经自动换挡模块分析判断,当达到换挡条件时,一体化控制器发出换挡信号,控制系统进入换挡流程。在卸载摘挡阶段,电机控制器控制驱动电机运行在转矩模式下,对驱动电机进行卸载操作;待驱动电机的输出转矩达到卸载目标转矩Te1*时,电机控制器控制驱动电机由转矩模式切换到自由模式,使得换挡执行机构在无载荷条件下平稳无冲击地完成摘挡操作;然后进入同步挂挡阶段,电机控制器控制驱动电机由自由模式切换到转速模式,对驱动电机进行主动调速,以缩小同步器主、从动部分的转速差,待驱动电机转速达到目标转速n*时,电机控制器控制驱动电机由转速模式切换回自由模式,使得换挡执行机构在无载荷条件下平稳无冲击地完成挂挡操作;最后进入加载行驶阶段,电机控制器控制驱动电机由自由模式切换到转矩模式,控制驱动电机的输出转矩加载到动力系统所需的目标转矩Te2*,此时换挡执行机构保持在当前位置,汽车按驾驶员操作意图正常驱动行驶,整个自动换挡过程结束。自动换挡过程的协调控制实现流程如图3所示。
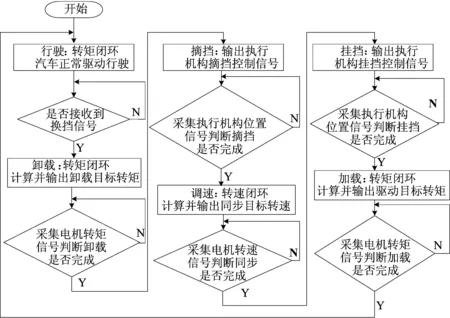
图3 自动换挡过程的协调控制流程
分析自动换挡过程可知,自动换挡协调控制系统通过对驱动电机转速、转矩的精准控制来弥补动力传动系统中无离合器的影响,平稳顺利地完成换挡,因此在整个自动换挡协调控制系统中对驱动电机的控制极为重要,电机的转速、转矩调节控制水平决定着换挡过程的快速性和平顺性。为此,在电机-变速器一体化电驱动系统实现自动换挡协调控制的基础上,对各个阶段驱动电机的转速、转矩制定相应的控制策略,提高系统自动换挡协调控制策略的可靠性和整车的换挡品质。
2 自动换挡过程的电机控制策略
就无离合AMT自动换挡过程中各个阶段驱动电机输出特性的调节控制而言,在汽车正常驱动行驶、卸载和加载阶段都属于电机的转矩调节,在同步阶段属于转速调节。在整个换挡过程中不但要求对驱动电机的转矩和转速进行精准地调节,还需要控制驱动电机在转矩调节与转速调节间进行切换,整个控制环节都是一体化控制器自动协调完成,驱动电机的输出特性暂时不受加速踏板控制。
2.1 电机转矩闭环控制
在驱动行驶、卸载和加载阶段都属于电机的转矩闭环控制,整个传动系统可视为刚性连接,其动力学方程为:
(1)
其中,J1、J2为变速器输入、输出轴处的等效转动惯量;Te为驱动电机的输出转矩;Tr为整车所受的阻力矩;ωe为驱动电机的输出转速;ig为变速器当前挡位的传动比;i0为主减速器传动比。
AMT变速器最大的缺点是在换挡过程中换挡冲击大,容易产生噪声。换挡冲击度作为评价换挡品质的重要指标,它的大小用车辆纵向加速度的变化率表示,在电机转矩闭环控制中,其大小表示为:
(2)
其中,a为车辆纵向加速度;r为车轮等效半径;J为整车等效转动惯量。
由于整个换挡过程短暂,整车等效转动惯量J比较大,所以可以认为阻力矩Tr变化很小,因此(2)式可简化为:
(3)
由(3)式可知,在汽车正常驱动行驶、卸载和加载阶段,换挡冲击度正比于驱动电机转矩Te的变化率,如果驱动电机的输出转矩变化率过大,将会产生很大的冲击度,直接影响整车换挡平顺性和乘坐舒适性。本文采用德国标准[5]|j|≤10 m/s3。
因此,需要根据电机转矩闭环控制来对驱动电机的转矩变化率进行调节控制,从而避免产生大的冲击。在电机转矩闭环控制过程中,驱动电机的转矩Te的变化率应满足由换挡冲击度确定的边界条件,即
(4)
由于本文中驱动电机采用的是表面装贴式永磁同步电机,有Ld=Lq,而最大转矩电流比(maximum torque per ampere,MTPA)控制能够通过给定的目标转矩来控制永磁同步电机交直轴电流分量的大小,达到单位电流输出转矩最大。因此对该电机进行id=0的矢量控制,即可实现MTPA控制。故电机的转矩闭环控制可通过基于查表法的MTPA控制策略来实现。
首先进行离线计算,5 A为步长,转速以50 r/min为步长,对电流极限环和升降挡区域范围内的点进行试验测试,采集驱动电机输出转矩值,得出的对应关系如下:
(5)
将获得的数据生成表格,根据车速v和目标转矩Te*,通过查表方式,即可获得此时对应MTPA的iq控制信号,从而实现在驱动行驶、卸载和加载阶段的驱动电机转矩闭环控制[6]。
2.2 电机转速闭环控制
挂挡前的同步阶段是通过电机主动调速来完成同步器主、从动部分的快速同步,减少非同步挂挡对同步器的磨损,减小换挡冲击。在同步阶段属于电机的转速闭环控制,由电机驱动转子到变速箱输入端调速,动力学方程为:
(6)
同步完成后,进入挂挡阶段,此时换挡冲击度的计算式如下:
(7)
其中,Tt为同步器传递转矩。
(7)式表明此阶段的换挡冲击正比于同步器传递转矩的变化率,设同步时间为ΔT,挂挡前主、从动齿轮角速度差为Δω,则同步过程中同步器传递的平均转矩为:
(8)
若同步时间ΔT不变,Δω越大,同步器转递的平均转矩Tt越大,因此通过电机主动调速来缩小同步器主、从动部分的转速差是减小冲击度的最有效方法。
因此,在同步阶段驱动电机应能主动调速,缩小转速差,完成主、从动齿轮的同步,减少同步器的滑摩冲击。该阶段一体化控制器根据变速器输出轴的当前转速n、当前挡位传动比ig和目标挡位传动比igmb来确定驱动电机调速的目标转速n*,即
(9)
其中,Δn为转速修正量,考虑到在完成同步的这段时间内,驱动电机的同步转速会随着汽车速度的波动而发生变化。
n*在换挡过程中车速变化剧烈时影响较大,与汽车加速度有关。
为了使驱动电机转速能快速响应目标车速达到稳态,汽车在不同行驶工况和换挡点应具有自适应调节能力,使驱动电机快速准确地达到挂挡的同步目标转速,顺利完成换挡。
在速度环控制算法的选择上,模糊控制可以引入专家经验,实现不同换挡点的转速调节,适应性好、控制稳定,但单独使用模糊控制难以平滑消除达到目标车速的稳态偏差,且对控制器运算性能要求较高,而PID算法简单又可以很好地消除稳态偏差,但动态性能不佳,因此综合两者的优点,利用模糊控制算法实时修正PID参数,采用模糊PID控制器对电机转速进行调节,如图4所示,以达到同步时速度环脉动小、响应快,而且提高了系统的控制精度和鲁棒性,具有良好的系统控制性能[7-8]。
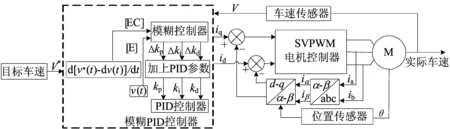
图4 电机转速的模糊PID控制
3 自动换挡仿真试验验证
3.1 系统仿真模型
根据无离合AMT电驱动系统自动换挡过程协调控制理论和电机的转矩、转速双闭环矢量控制策略,按照电动汽车前向仿真建模思路,在Matlab/Simulink仿真软件环境下建立纯电动汽车的整车运动学模型、一体化系统控制器模型及永磁同步电机双闭环矢量控制模型。利用Stateflow模块搭建一体化系统协调控制模块和自动换挡功能模块,通过控制驾驶员加速踏板的开度,在设定综合工况下对无离合AMT电驱动系统的自动换挡过程进行模拟仿真试验,以验证自动换挡的可行性及协调控制策略的有效性。自动换挡协调控制的总体仿真模型如图5所示。
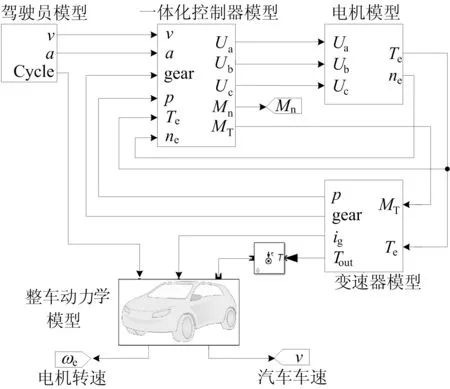
图5 自动换挡协调控制的总体仿真模型
3.2 试验结果分析
系统仿真的主要参数见表1所列。
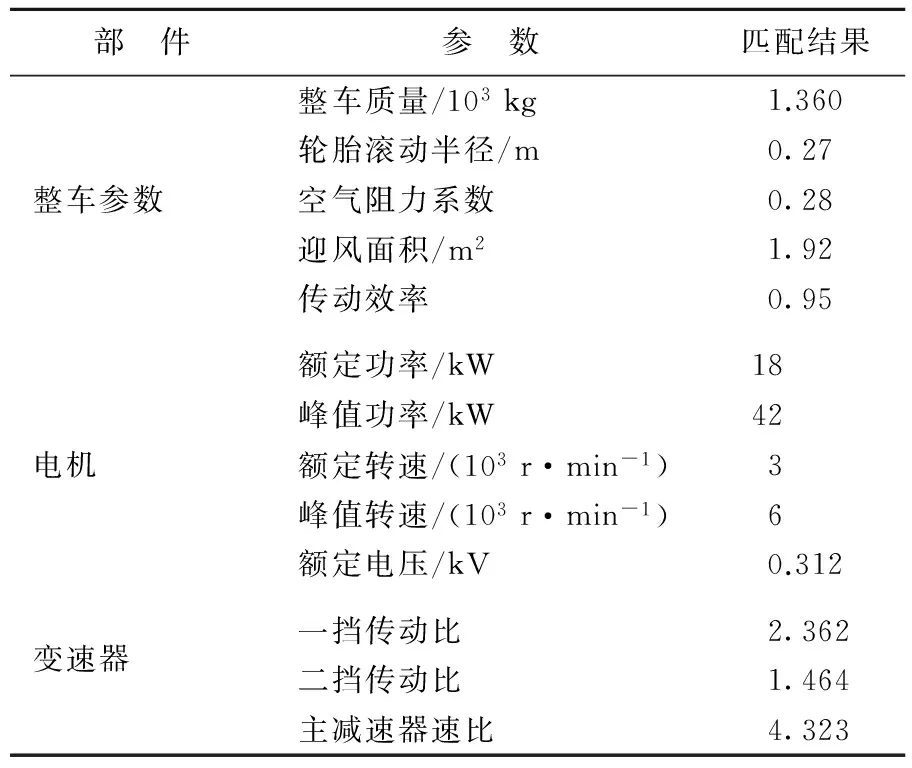
表1 整车动力系统参数
为了验证自动换挡的可行性及协调控制策略的有效性,设计如下综合工况:电动汽车在开始的前2 s内以6%的加速踏板开度在理想路面上行驶,车速保持在50 km/h左右,然后控制加速踏板开度增加到60%并保持稳定,汽车加速行驶,到5 s时开始爬上25%的坡,整个升降挡仿真试验时间为10 s。自动换挡仿真试验结果如图6所示。
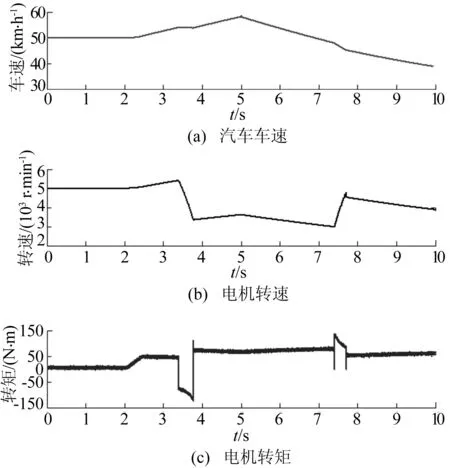
图6 自动换挡仿真试验结果
由图6可知,汽车在整个10 s的行驶过程中完成了自动升挡和降挡操作。其中,从图6b驱动电机转速图可以看出,在降挡结束约7.7 s时刻,电机转速发生了轻微突降,这是因为降挡调速时驱动电机的同步目标转速计算于同步阶段的初始时刻,而在同步过程中,汽车由于上坡车速下降变化较大,驱动电机达到初始同步目标转速时,此转速已高于当前车速所对应的同步转速,因此驱动电机转速发生了轻微突变下降,来实现同步器的同步,而此时的换挡冲击度也对应最大。
设定综合工况下协调控制信号曲线如图7所示,其中,换挡各阶段信号stage,在卸载摘挡阶段为1、同步挂挡阶段为-1、加载行驶阶段为0;Mn为电机控制模式信号,驱动模式为0、卸载转矩闭环控制为-1、加载转矩闭环控制为1、同步转速闭环控制为2;MT为换挡执行机构工作模式切换信号,初始值为0,摘挡为-1,挂挡为1;p为换挡执行机构位置信号,卸载之前为1、同步阶段为0、加载后为2。
从图7a可以得出整个自动换挡时间约为0.35 s,且换挡时间主要用于同步阶段,为图7中p值为0时所对应的时间,具体来说换挡同步时间主要取决于电机调速性能和电机转子到变速器输入轴的转动惯量大小。
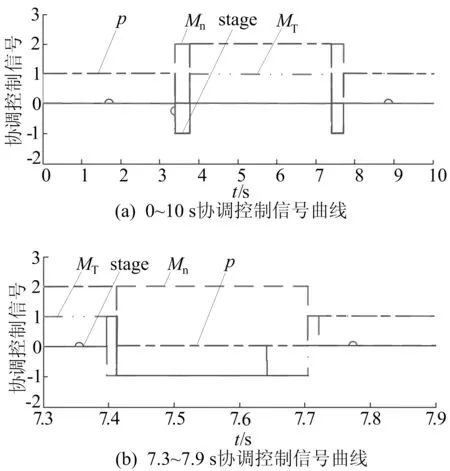
图7 协调控制信号曲线
换挡过程中的冲击度如图8所示。换挡冲击剧烈变化主要出现在电机转矩闭环控制过程中的转矩调节以及转矩闭环调节和转速闭环调节之间的切换,如图8中Mn为-1时的卸载转矩闭环调节,为1时的加载转矩闭环调节以及由-1切换到同步转速闭环调节2、2切换回1的闭环切换,但其绝对值都在10 m/s3范围内,满足要求。
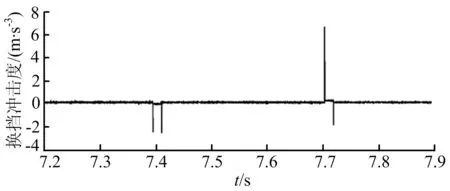
图8 换挡冲击度
4 结 论
本文在建立电机-变速器一体化电驱动系统动力学模型的基础上,分析了无离合AMT电驱动系统的自动换挡原理,制定了一种基于驱动电机转矩、转速双闭环控制的自动换挡协调控制策略。
通过设计的综合工况,本文对无离合电机-变速器一体化电驱动系统自动换挡的可行性和协调控制策略的有效性进行试验验证。试验结果表明,所制定的自动换挡协调控制策略能够对驱动电机转速、转矩进行精准控制,各换挡机构协调配合,换挡冲击度的绝对值都在10 m/s3范围内,符合标准,顺利平稳地完成了无离合AMT电驱动系统的自动换挡,并且换挡时间短,约为0.35 s,具有良好的换挡品质。
[1] BREEN J L,BOWER G.Clutchless shifting of an automated manual transmission in a hybrid powertrain:SAE Technical Paper 2011-01-2194[R].SAE,2011.DOI:10.4271/2011-01-2194.
[2] 王雷,席军强.无离合器纯电动客车机械式自动变速器换挡评价的研究[J].汽车工程学报,2012,2(1):35-39.
[3] 李伟.轻型电动汽车电机变速器集成驱动系统控制策略的研究[D].武汉:武汉理工大学,2011.
[4] LIU H B,LEI Y L,LI Z J,et al.Gear-shift strategy for a clutchless automated manual transmissionin battery electric vehicles[J].SAE International Journal of Commercial Vehicles,2012,5(1):57-62.
[5] 胡建军,李康力,胡明辉,等.纯电动轿车AMT换挡过程协调匹配控制方法[J].中国公路学报,2012,25(1):152-158.
[6] 王宝金.电动汽车永磁同步电机驱动及控制方法研究[D].哈尔滨:哈尔滨工业大学,2010.
[7] 黄星海,刘海鸥,杨爱均.AMT试验台电机调速系统设计[J].合肥工业大学学报(自然科学版),2013,36(2):152-155.
[8] 张强,曲仕茹.车辆自适应巡航控制系统的模糊PID实现[J].汽车工程,2008,30(7):569-572.
(责任编辑 胡亚敏)
Study of coordinated control strategy of automatic shift based on AMT
ZHANG Bingli, TANG Bo, ZHOU Deming, WU Xinping
(School of Machinery and Automobile Engineering, Hefei University of Technology, Hefei 230009, China)
In order to improve the automatic shift quality of automated mechanical transmission(AMT), in view of the control characteristic of motor-transmission integrated drive system and based on the analysis of the automatic shift principle of the clutchless drivetrain, the framework and implementation flow chart of coordinated control system of automatic shift are made, and a coordinated control strategy of automatic shift based on the torque and speed double closed-loop control of driving motor is proposed. The results of the simulation under the settled conditions show that the coordinated control strategy of automatic shift is correct and reliable, and the shift quality is excellent.
automated mechanical transmission(AMT) system; clutchlessness; automatic shift; coordinated control; driving motor
2015-04-10;
2015-05-07
安徽省科技重大专项资助项目(15ZZ02039);安徽省科技攻关资助项目(1604a0902159)和安徽省自然科学基金资助项目(1308085ME64)
张炳力(1968-),男,安徽合肥人,博士,合肥工业大学教授,硕士生导师.
10.3969/j.issn.1003-5060.2016.09.006
U463.61
A
1003-5060(2016)09-1178-06
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
汽车维修与保养(2020年11期)2020-06-09
电子制作(2018年11期)2018-08-04
自动化学报(2017年4期)2017-06-15
大学教育(2016年7期)2016-07-27
中国塑料(2015年3期)2015-11-27
空间控制技术与应用(2015年2期)2015-06-05
汽车维修与保养(2015年6期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
汽车维修与保养(2014年12期)2014-04-18