肩部和腰部等效作用参数对武器射击稳定性影响作用的仿真分析
2016-11-23 10:27王昌明何云峰
振动与冲击 2016年19期
阎 舜, 王昌明, 何云峰, 郑 鹏
(1.南京理工大学 机械工程学院,南京 210094; 2.中国兵器工业导航与控制技术研究所,北京 100089)
肩部和腰部等效作用参数对武器射击稳定性影响作用的仿真分析
阎 舜1, 王昌明1, 何云峰1, 郑 鹏2
(1.南京理工大学 机械工程学院,南京 210094; 2.中国兵器工业导航与控制技术研究所,北京 100089)
轻武器立姿射击过程中,射手的控制因素对武器射击稳定性影响明显,为了研究人体肩部和腰部的控制作用对某榴弹发射器射击稳定性的影响,根据武器射击运动的特点和规律,将抵肩射击系统简化为由武器等效质量和躯干等效质量组成的两刚体五自由度人枪作用模型,将人体上肢对武器的控制作用和人体对躯干的控制作用分别简化为肩部和腰部等效弹簧和阻尼器的作用。通过对各等效作用参数的仿真计算,获得相应的武器射击运动曲线。仿真试验结果表明,人体肩部和腰部的不同控制作用对武器射击稳定性具有不同程度的影响,为智能枪架设计中相关人体作用参数的控制提供了理论参考。
等效作用参数;人枪作用模型;射击稳定性
武器的射击稳定性是影响射击散布精度的重要因素之一。手持式武器立姿射击过程中,武器以射手为架坐,人的因素不可避免的对武器的射击稳定性会产生影响,进而影响武器的射击精度。因此,通过对等效人体参数的分析研究可以对新型武器的射手训练提供指导,为智能枪架的相关控制参数的设计提供理论参考。
前人根据不同的研究对象,建立了相应的系统仿真动力学模型,对武器的后坐运动和人与武器的相互作用进行了分析研究[1-7]。本文针对某在研特战手持式榴弹发射器进行仿真计算分析,由于武器口径大,人枪相互作用效能与常规制式武器有所不同,射手进行射击实验时,存在因施力状态不同而导致射击精度差异较大的现象,因此通过建立人枪系统数学模型,对人体肩部和腰部等效参数进行数值仿真分析以研究人的控制作用对武器射击稳定性的影响规律。
1 立姿射击系统模型的建立
对新型榴弹发射器进行实弹射击实验,分别在射手和武器上设置标记点,在射手的右侧和头顶设置同步触发高速摄影设备,记录射击过程人枪系统运动规律,如图1所示。
由高速摄影资料可知,新型榴弹发射器射击过程系统运动规律与传统的制式武器相比具有相似之处,但是由于口径远大于传统武器,其后坐运动和水平偏转更为明显,系统的水平转动不能忽略处理。射击运动特征如下:① 榴弹发射器相对于上躯干有较明显的水平后坐运动;② 榴弹发射器相对于上躯干有明显的俯仰运动;③ 射手的躯干部分相对下肢有明显的俯仰运动;④ 射手的躯干部分在水平方向有一定的偏转运动;⑤ 射手的下肢相对于地面几乎无相对的运动。
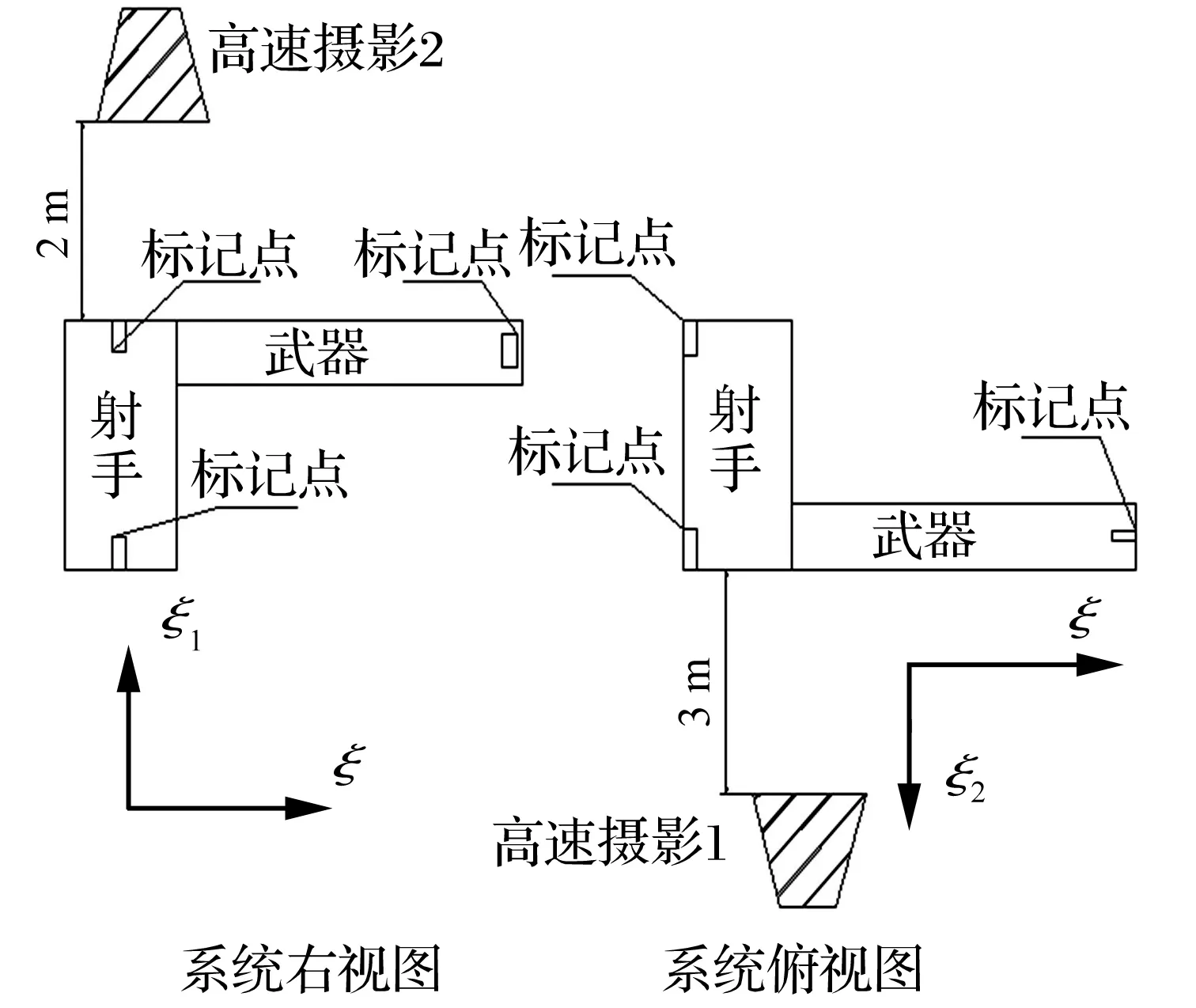
图1 立姿射击实验示意图Fig.1 Schematic diagram of standing shooting experiment
火药燃气作用于膛底产生的后坐力是人枪系统的输入激励,后坐力作用点的位置对系统的运动能够产生重要的影响。射手进行立姿无依托射击时,由于握持和瞄准的需要,人体水平转动轴与武器膛线不在同一竖直面,因此在水平面中,后坐力相对于人体水平回转轴产生力矩并引起系统水平转动。武器的膛线相对于系统的俯仰旋转中心(立姿射击时为腰部)在竖直方向存在较大的力臂,因此后坐力在俯仰方向的力矩较大,系统的俯仰运动较为明显。不同的射手对武器具有不同的控制能力,因此射击实验中真实抵肩点的位置因人而异,武器相对人体存在转动力矩,在射击过程中存在武器相对于人体躯干的运动。
射手对武器的控制是通过全身肌肉、骨骼及各种软组织协同作用实现的。对每一块肌肉、骨骼都进行建模不但是十分复杂的工作,而且由于存在大量未知参数,将无法对模型进行模拟计算。由于武器在射击过程中主要表现为后坐运动,俯仰运动和水平转动,而武器的俯仰运动和水平转动是影响射击精度的主要因素,因此射手对武器的控制作用可以简化为人体在后坐、俯仰和水平转动方向对武器的限制作用。对人枪系统射击模型进行如下简化:① 将射手的下肢简化为与地面固连,在射击过程中保持静止;② 将射手躯干部分相对下肢的俯仰运动和水平转动分别设定为系统的独立运动自由度,在简化模型中分别用一组等效弹簧和阻尼器表征腰部肌肉组织对此两个自由度的限制作用;③ 射击过程中,人体手臂与武器基本保持相对一致的运动,肩部和头部的夹持作用使枪托在射击过程中始终与人体接触。因此手臂和武器可简化为一个等效质量,该等效质量相对于躯干分别有水平后坐、俯仰和水平转动的自由度。为了表征肩部肌肉和手臂对此三个自由度的限制作用,分别用一组等效弹簧和阻尼器进行简化处理;④ 榴弹发射器的膛压曲线由膛压测试实验获得,火药燃气的作用具有脉冲信号的特点。在系统动力学仿真计算中,用膛压曲线的拟合函数进行等效计算。立姿射击模型简化如图2所示。
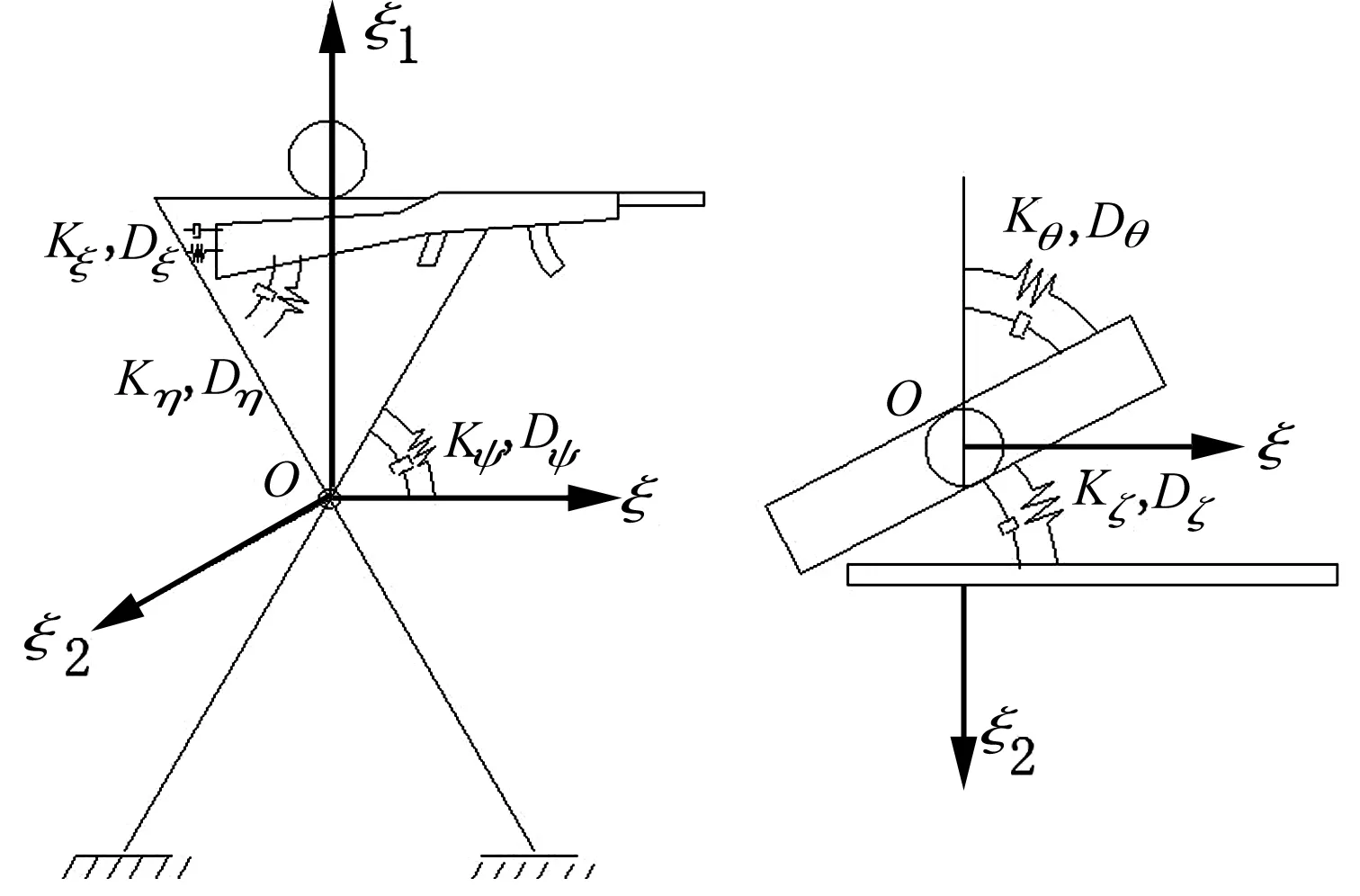
图2 立姿射击简化模型Fig.2 Simplified model of standing shooting
在躯干的转动中心建立与大地固连的惯性坐标系Oξξ1ξ2,其中Kξ、Dξ分别为武器相对于躯干后坐方向的等效弹性系数和阻尼系数,表示人体肩部对武器后坐的控制作用;Kη、Dη为武器相对于躯干俯仰方向的等效弹性系数和阻尼系数,表示人体肩部对武器俯仰运动的控制作用;Kζ、Dζ为武器相对于躯干水平转动方向的等效弹性系数和阻尼系数,表示人体肩部对武器水平转动的控制作用;Kψ、Dψ为躯干相对于惯性坐标系俯仰方向的等效弹性系数和阻尼系数,表示人体腰部对躯干俯仰运动的控制作用;Kθ、Dθ为躯干相对于惯性坐标系水平转动方向的等效弹性系数和阻尼系数,表示人体腰部对躯干水平转动的控制作用。
2 系统动力学方程描述
由图2可知,简化的立姿射击系统为两刚体五自由度模型。两刚体分别由躯干等效质量和武器与手臂的等效质量组成,五个自由度为:武器等效质量相对于躯干等效质量的后坐运动、俯仰运动、水平转动,躯干等效质量相对于惯性坐标系的俯仰运动、水平转动。对应的广义位移分别为:武器后坐方向的广义位移ξ;武器相对于躯干俯仰的广义位移η;武器相对于躯干水平转动的广义位移ζ;躯干相对于惯性坐标系俯仰的广义位移ψ;躯干相对于惯性坐标系水平转动的广义位移θ。
(1) 系统动能
系统由武器等效质量和躯干等效质量组成,分别求取各质量的转动动能和平动动能可得系统动能如式(1)所示。
(1)
式中:Icm和Ir分别为躯干和武器等效体相对于Oξ2轴的转动惯量;Icm1和Ir1分别为躯干和武器等效体相对于Oξ1轴的转动惯量;rcm和r分别为躯干等效体质心和武器等效体质心在坐标系Oξξ1ξ2中的矢径;m和mr分别为躯干和武器等效体的质量。
(2) 系统势能
系统射击运动过程中两等效质量存在势能变化,求取系统势能如式(2)所示。
mrg[L′(cosψ-cosψ0)+ξsin(ψ+η)-
ξ0sin(ψ0+η0)]
(2)
式中:L′为抵肩点与O点的距离在ξOξ1平面的投影;ψe,θe,ηe,ζe分别为各弹簧静态平衡位置;ξ0,ψ0,η0分别为ξ,ψ,η的初始值。
(3) 系统耗散函数
系统中由阻尼器提供非保守力,对应的系统耗散函数如式(3)所示。
(3)
(4) 系统动力学方程
由于系统可以看作是具有完整约束的非自由刚体系,可应用第二类Lagrange方程建立系统动力学微分方程如式(4)所示:
(4)
式中:L为Lagrange函数;Qξ、Qψ、Qη、Qζ、Qθ分别为广义位移对应的广义力。
L=T-V;Qξ=-F(t);Qψ=(δ+δ′+L′cosψ)F(t);
Qη=(δ+δ′)F(t);Qω=(hcosθ+ρ+ρ′)F(t);
Qζ=(ρ+ρ′)F(t)
式中:h为抵肩点与O点的距离在Oξ2轴上的投影;δ为武器等效体质心与抵肩点的距离在Oξ1轴上的投影;δ′为火药燃气力作用点与武器等效体质心的距离在Oξ1轴上的投影;ρ为武器等效体质心与抵肩点的距离在Oξ2轴上的投影;ρ′为火药燃气力作用点与武器等效体质心的距离在Oξ2轴上的投影;F(t)为火药燃气作用力。
系统动力学方程中有关参量的估计如表1所示。其中人体的惯量参数根据身高和体重按照统计学规律计算求得;等效弹性系数和阻尼系数的取值范围由模型参数辨识实验获得;火药燃气作用力由榴弹发射器膛压测试实验获得。
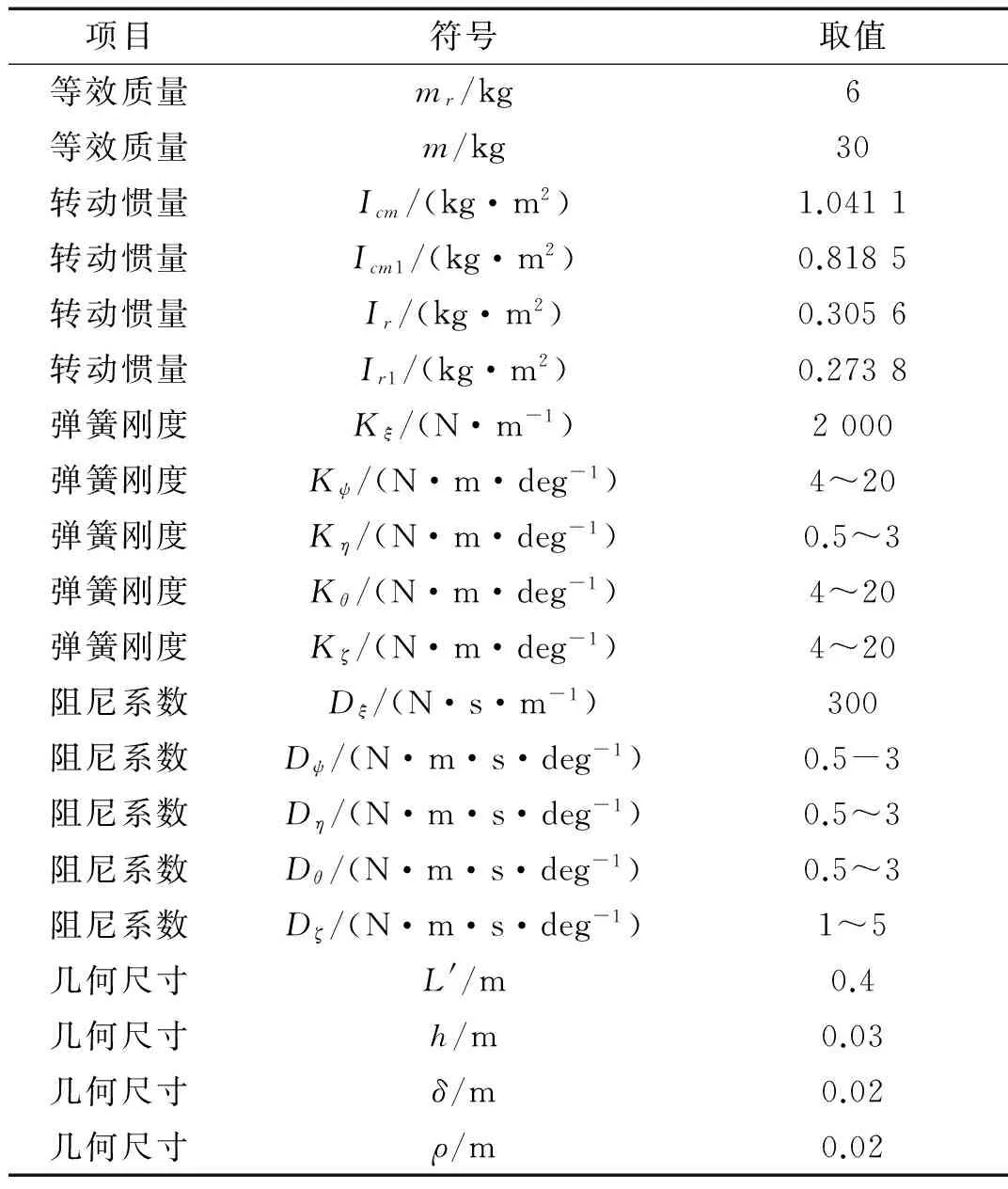
表1 抵肩射击模型参数估计
3 等效作用参数对武器射击稳定性的影响分析
射击过程中,武器俯仰运动和水平转动的趋势是评判武器射击稳定性优劣主要因素。根据模型假设,分别对各等效作用参数(Kη、Dη、Kζ、Dζ、Kψ、Dψ、Kθ、Dθ)在相应的取值区间内进行仿真计算,采用4阶龙格—库塔数值方法求解系统动力学方程,获得相应的武器射击运动变化曲线如图3~图12所示。
(1) 等效参数Kη、Dη的取值变化对武器水平转动无影响。Kη、Dη的取值变化对武器俯仰运动的影响如图3和图4所示。随着参数取值的增加,武器俯仰角位移曲线都表现为俯仰角位移的最大值有所减小,到达最大值的时刻略有提前。
参数Kη由0.5(N·m·deg-1)增加到3(N·m·deg-1)时,武器的最大俯仰角由0.135°减小为0.114°,弹丸出膛时刻武器的俯仰角由0.063 9°减小为0.062 6°(如表2所示)。由射击偏差转换计算可知,出膛时刻武器俯仰角减小幅度为0.001 3°,对应于100 m射击目标在高低方向的射击偏差为0.23 cm。
图3 Kη对武器俯仰运动的影响曲线Fig.3 The curves of pitching movement VS. Kη
图4 Dη对武器俯仰运动的影响曲线Fig.4 The curves of pitching movement VS. Dη
参数Dη由0.5(N·m·s·deg-1)增加到3(N·m·s·deg-1)时,武器的最大俯仰角由0.265°减小为0.027°,弹丸出膛时刻武器俯仰角由0.089°减小为0.034°(如表3所示)。经射击偏差转换计算,弹丸出膛时刻武器俯仰角减小幅度为0.055°,对应于100 m射击目标在高低方向射击偏差为9.6 cm。
(2) 等效参数Kζ、Dζ、Kθ、Dθ的取值变化对武器俯仰运动无影响。Kζ、Dζ、Kθ、Dθ的取值变化对水平转动的影响如图5~图8所示。随着参数取值的增加,武器水平转动角位移曲线都表现为水平转角的最大值减小,到达最大值的时刻略有提前。
参数Kζ由4(N·m·deg-1)增加到20(N·m·deg-1)时,武器的最大水平转角由0.013 8°减小为0.009 3°,弹丸出膛时刻武器的水平转角由0.008 9°减小为0.008 3°(如表4所示)。经射击偏差转换计算,弹丸出膛时刻武器水平转角减小幅度为0.000 6°,对应于100 m射击目标在水平转动方向的射击偏差为0.105 cm。
表2 不同Kη取值的武器俯仰角位移
表3 不同Dη取值的武器俯仰角位移
参数Dζ由1(N·m·s·deg-1)增加到5(N·m·s·deg-1)时,武器的最大水平转角由0.016 2°减小为0.008 3°,弹丸出膛时刻武器的水平转角由0.010 3°减小为0.005 9°(如表5所示)。经射击偏差转换计算,弹丸出膛时刻武器水平转角减小幅度为0.004 4°,对应于100 m射击目标在水平转动方向的射击偏差为0.77 cm。
参数Kθ由4(N·m·deg-1)增加到20(N·m·deg-1)时,武器的最大水平转角由0.256°减小为0.147°,弹丸出膛时刻武器的水平转角由0.124°减小为0.103°(如表6所示)。经射击偏差转换计算,弹丸出膛时刻武器水平转角减小幅度为0.021°,对应于100 m射击目标在水平转动方向的射击偏差为3.66 cm。
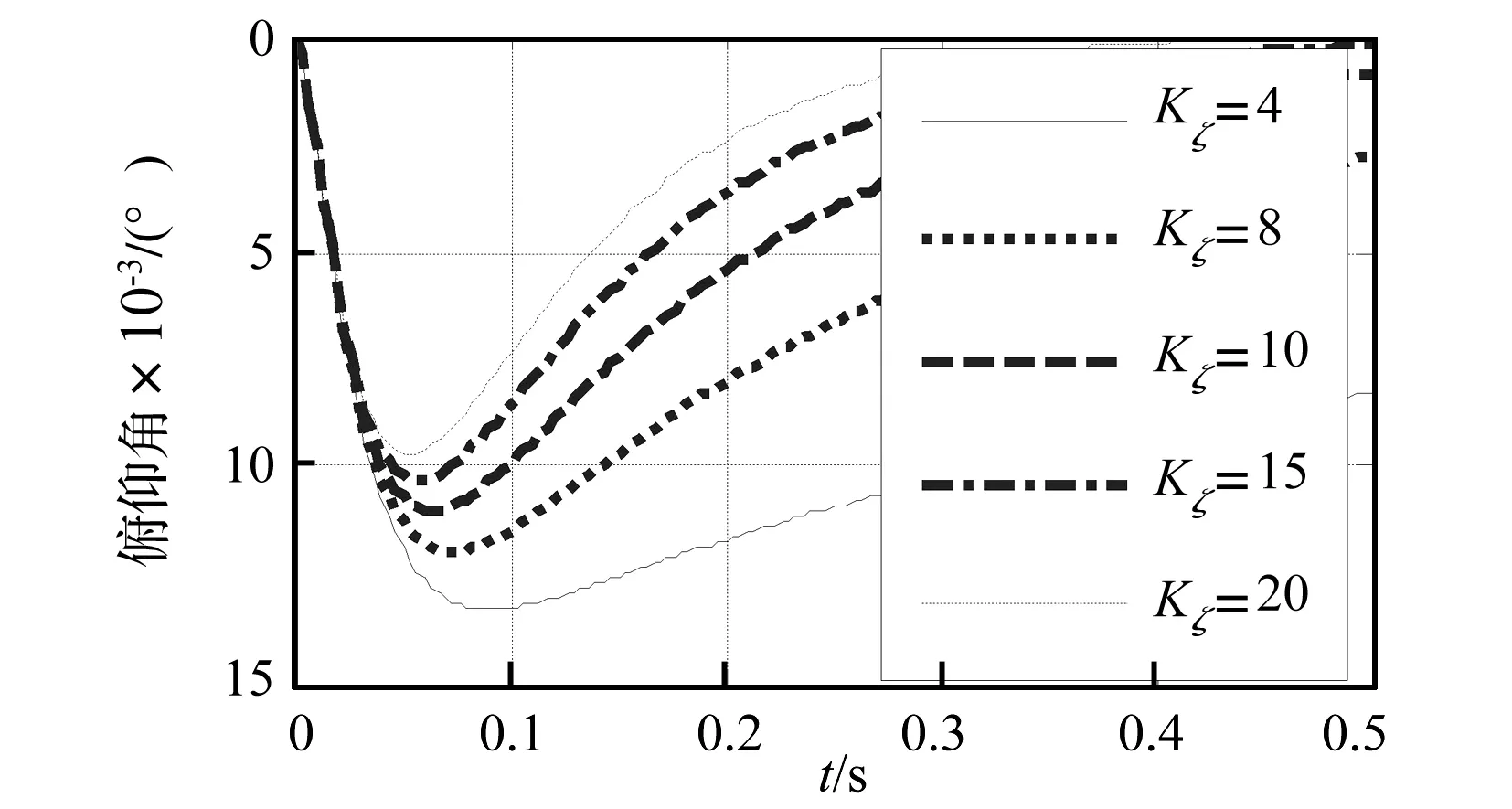
图5 Kζ对武器水平转动的影响曲线Fig.5 The curves of yawing movement VS. Kζ
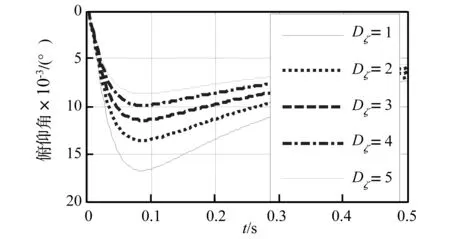
图6 Dζ对武器水平转动的影响曲线Fig.6 The curves of yawing movement VS. Dζ
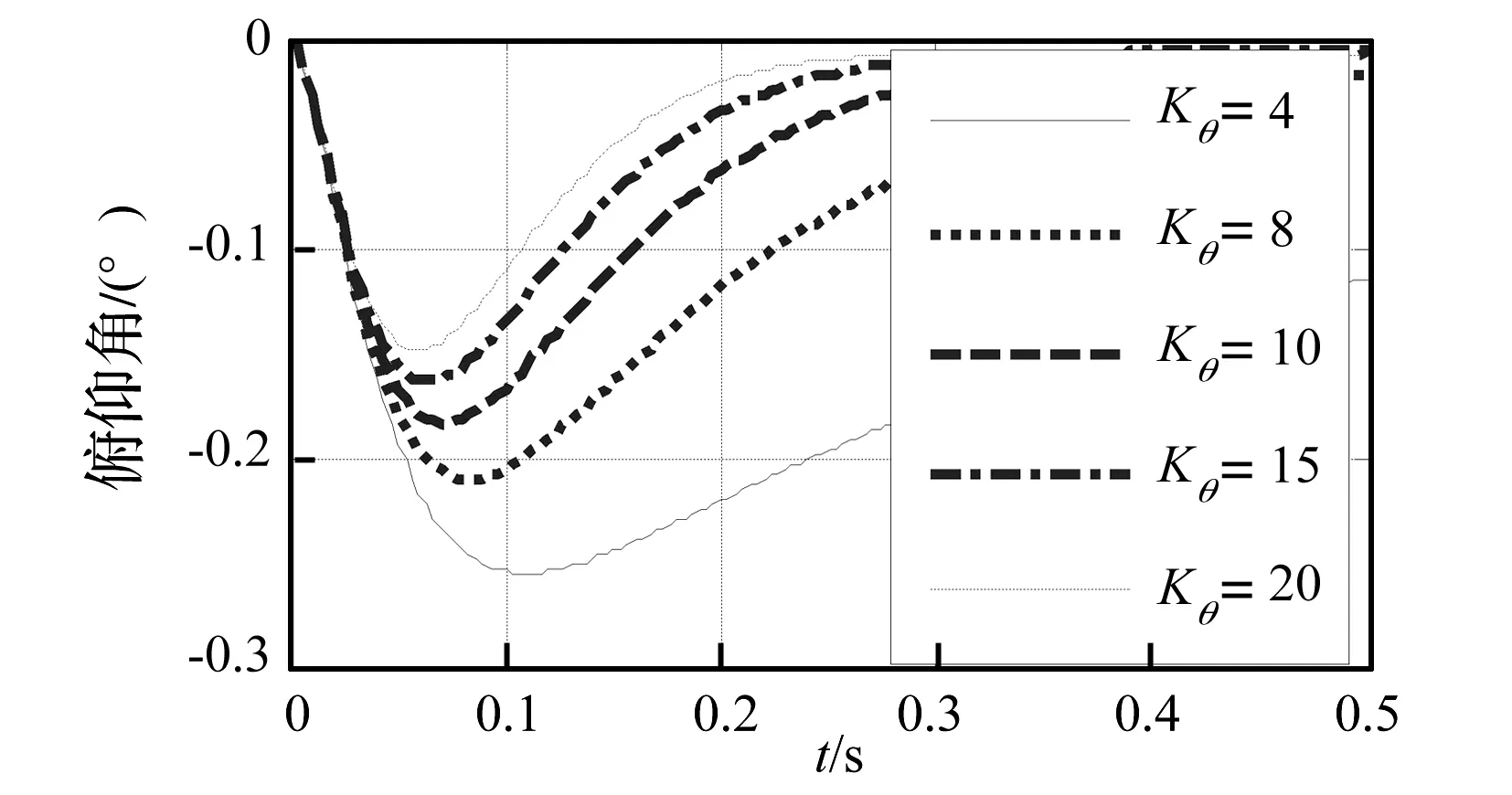
图7 Kθ对武器水平转动的影响曲线Fig.7 The curves of yawing movement VS. Kθ

图8 Dθ对武器水平转动的影响曲线Fig.8 The curves of yawing movement VS. Dθ
参数Dθ由0.5(N·m·s·deg-1)增加到3(N·m·s·deg-1)时,武器的最大水平转角由0.843°减小为 0.149°,出膛时刻武器的水平转角由0.239°减小为0.077°(如表7所示)。经射击偏差转换计算可知,弹丸出膛时刻武器水平转角减小幅度为0.162°,对应于100 m射击目标在水平转动方向的射击偏差为28.27 cm。
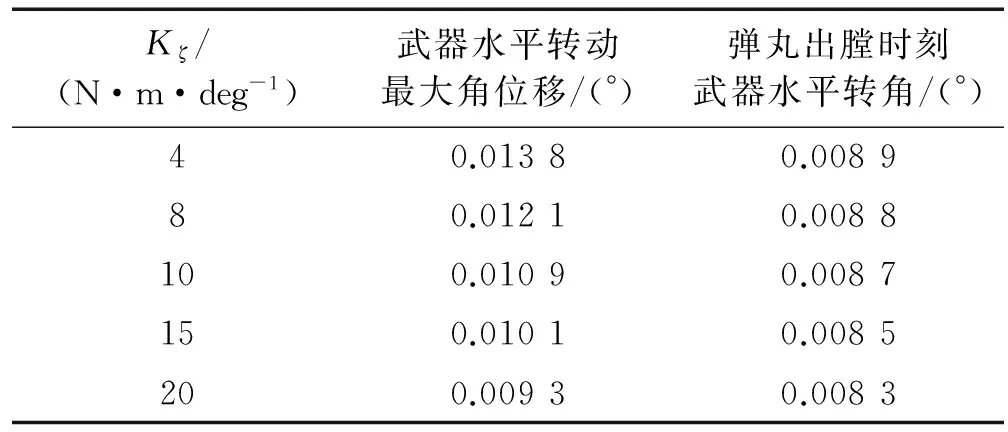
表4 不同Kζ取值的武器水平转动角位移

表5 不同Dζ取值的武器水平转动角位移
表6 不同Kω取值的武器水平转动角位移
表7 不同Dω取值的武器水平转动角位移
(3) 仿真计算表明,等效参数Kψ、Dψ的取值变化对武器俯仰运动的影响明显,对水平转动的影响较小,如图9~图12所示。随着参数取值的增大,武器俯仰角位移曲线都表现为俯仰角的最大值减小,到达最大值的时刻略有提前;武器水平转动角位移曲线都表现为水平转角的最大值略有增加,到达最大值的时刻略有提前。
图9 Kψ对武器俯仰运动的影响曲线Fig.9 The curves of pitching movement VS. Kψ
图10 Kψ对武器水平转动的影响曲线Fig.10 The curves of yawing movement VS. Kψ
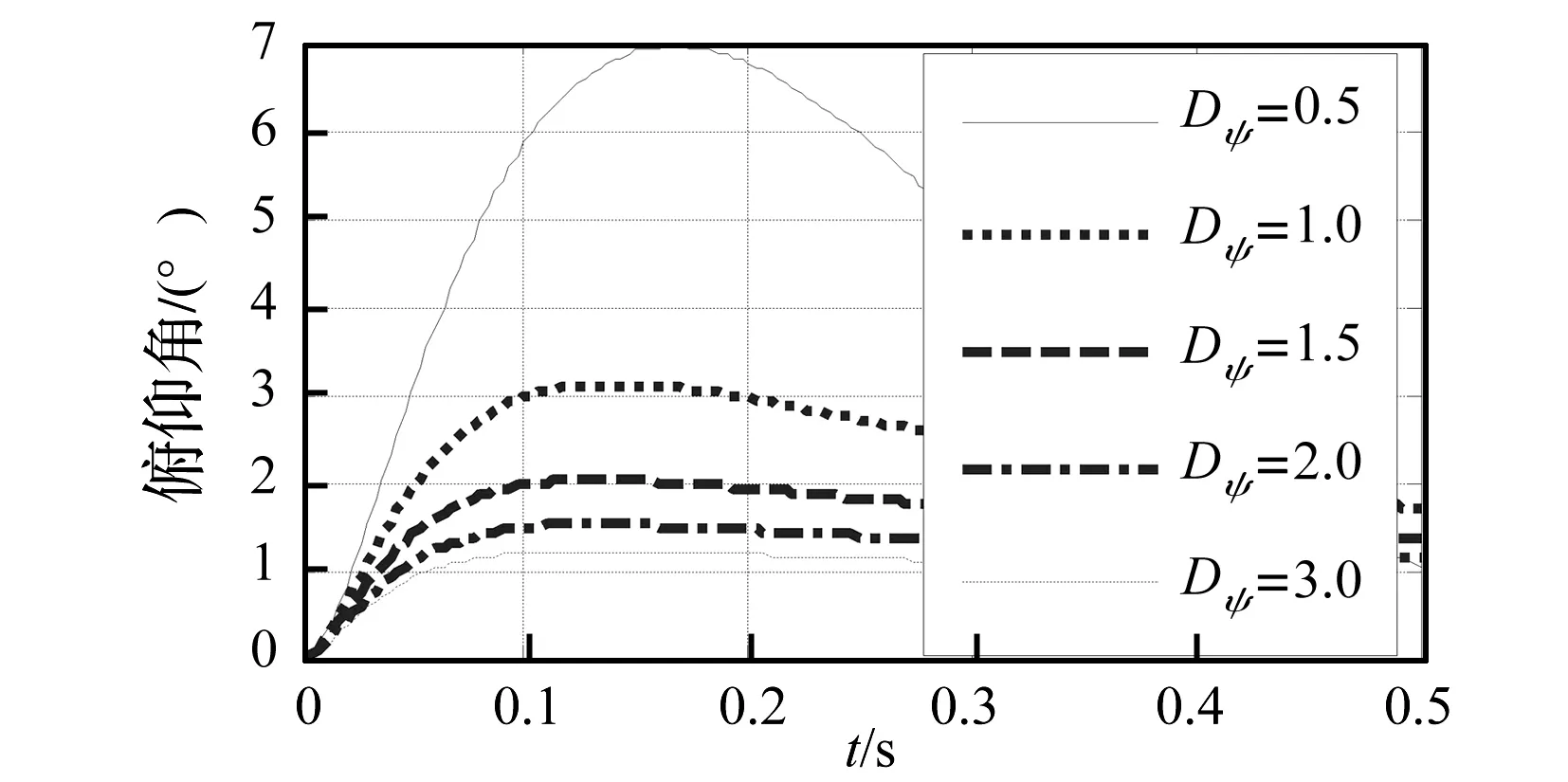
图11 Dψ对武器俯仰运动的影响曲线Fig.11 The curves of pitching movement VS. Dψ
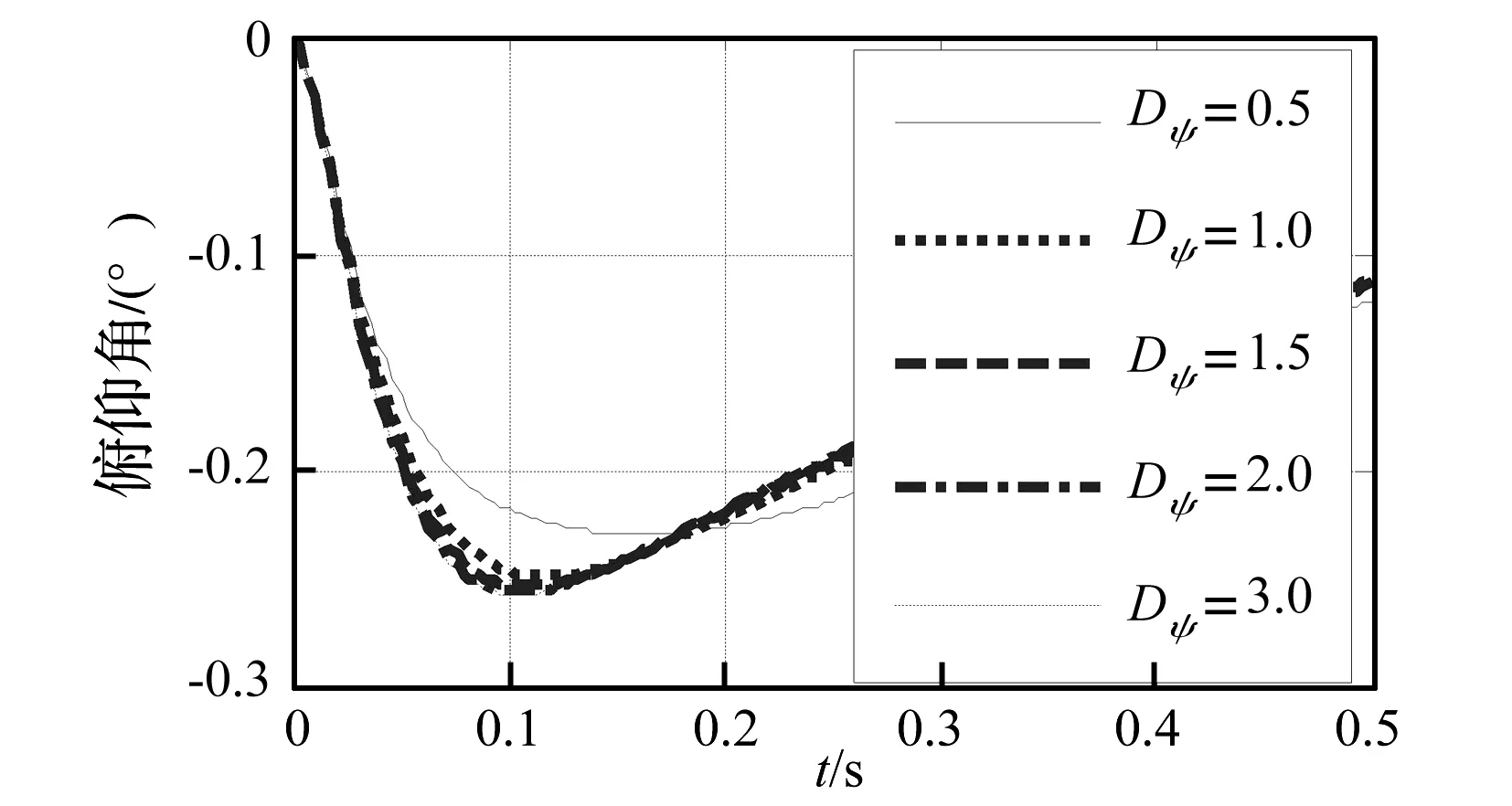
图12 Dψ对武器水平转动的影响曲线Fig.12 The curves of yawing movement VS. Dψ
参数Kψ由4(N·m·deg-1)增加到20(N·m·deg-1)时,武器的最大俯仰角由1.927°减小为1.191°,弹丸出膛时刻武器的俯仰角由0.809°减小为0.728°;武器的最大水平转角由0.254 8°增加为0.265 5°,弹丸出膛时刻榴弹发射器的水平转角由0.122 3°增加为0.124 2°(如表8所示)。由射击偏差转换计算可知,弹丸出膛时刻武器俯仰角减小幅度为0.081°,水平转角增大幅度为0.001 9°,对应于100 m射击目标在高低方向和水平转动方向的射击偏差分别为14.14 cm和0.33 cm。
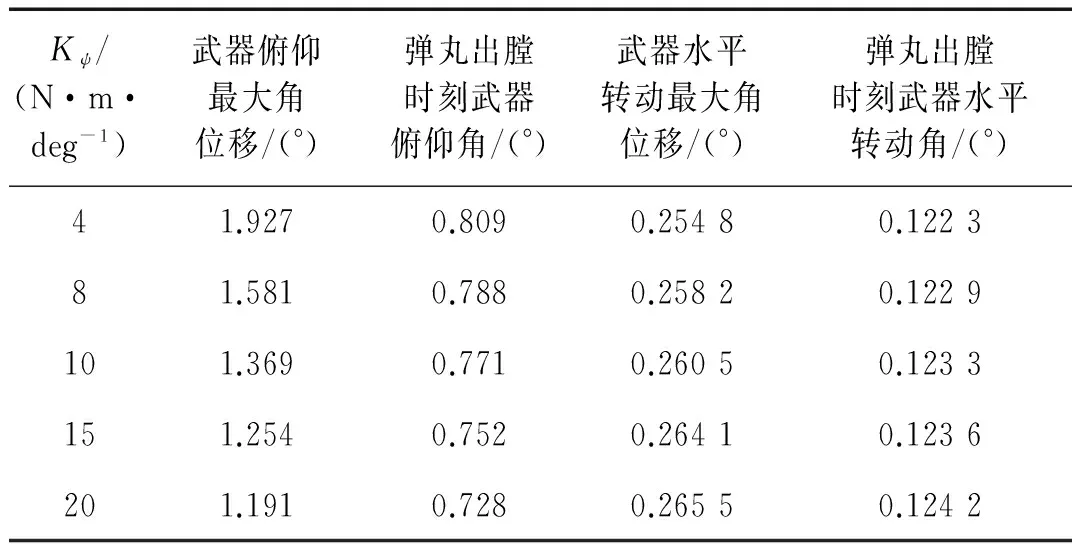
表8 不同Kψ取值的武器运动角位移
参数Dψ由0.5(N·m·s·deg-1)增加到3(N·m·s·deg-1)时,武器的最大俯仰角由6.95°减小为1.25°,弹丸出膛时刻武器的俯仰角由1.527°减小为0.567°;武器的最大水平转角由0.232°增加为0.259°,弹丸出膛时刻武器的水平转角由0.106°增加为0.128°(如表9所示)。由射击偏差转换计算可知,弹丸出膛时刻武器俯仰角减小幅度为0.96°,水平转角增大幅度为0.022°,对应于100 m射击目标在高低方向和水平转动方向的射击偏差分别为168 cm和3.84 cm。
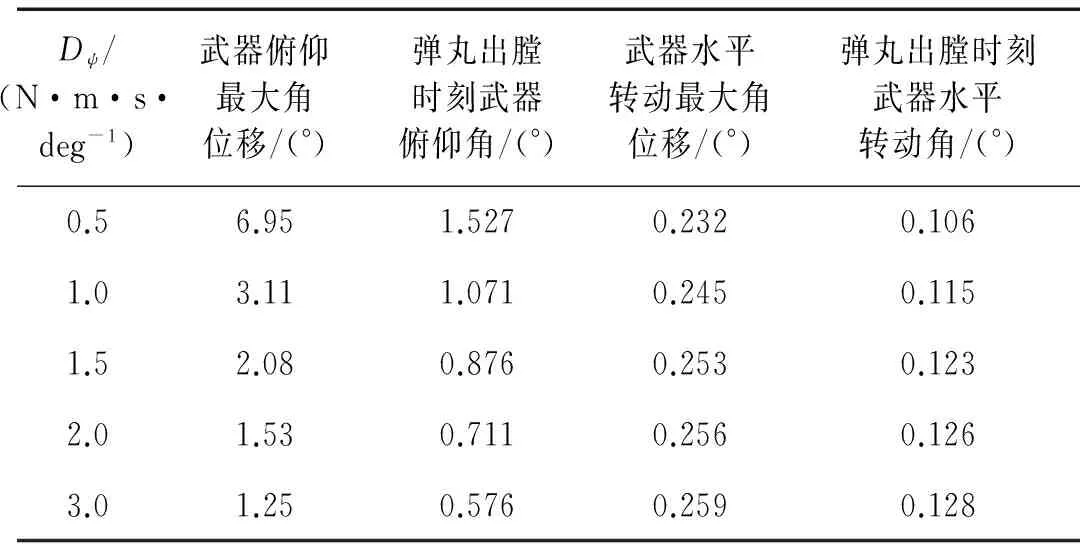
表9 不同 Dψ取值的武器运动角位移
综上所述,对武器俯仰运动能够产生影响的参数包括Kη、Dη、Kψ、Dψ,其中Dη、Kψ、Dψ对武器俯仰运动影响明显;对武器水平转动能够产生影响的参数包括Kζ、Dζ、Kψ、Dψ、Kθ、Dθ,其中Dθ对武器水平转动影响明显。
4 结 论
通过对由新型榴弹发射器组成的人枪系统的射击实验高速摄影资料分析,提取射击运动主要运动特点,建立立姿射击人枪系统简化模型,根据不同的肩部和腰部等效作用参数取值,对某榴弹发射器的射击运动进行仿真分析。仿真结果表明,武器相对于躯干俯仰方向的等效阻尼系数(Dη)、躯干相对于惯性坐标系俯仰方向的等效弹性系数和阻尼系数(Kψ、Dψ)对武器俯仰运动影响明显,躯干相对于惯性坐标系水平转动方向的等效阻尼系数Dθ对武器水平转动影响明显。因此智能枪架设计中的敏感设计参数为Dη、Kψ、Dψ、Dθ。仿真结果同时表明,在射击训练中增加射手腰部的肌肉强度是提高新型榴弹发射器射击稳定性的有效方法。
[1] 李永新.人枪相互作用模型与实验研究[D].南京:南京理工大学,1993.
[2] 包建东,王昌明,何云峰.人_枪模型的建立及仿真分析[J].兵工学报,2009, 30(5):513-517.
BAO Jiandong, WANG Changming, HE Yunfeng. Foundation of mart gun model and simulation analysis [J]. ACTA Armamentarii, 2009, 30(5): 513-517.
[3] BENZKOFER P D. Dynamic analysis of shoulder-fired weapons. AD:P009073, 1993.
[4] HUTCHINGS T D, RAHE A E. Study of man-weapon reaction forces application to the fabrication of a standard rife firing fixture[R]. AD:A034523, 1975.
[5] 王长庚,徐万和,徐诚.人_枪系统中不同自动方式对枪械后坐作用影响研究[J].兵工学报,2014, 35(5): 741-747.
WANG Changgeng, XU Wanhe, XU Cheng.Research on the influence of different automatic action of gun on its recoil effect in man-gun system[J]. ACTA Armamentarii, 2014, 35(5): 741-747.
[6] 宫鹏涵,周克栋,康小勇,等.某自动步枪发射动力学仿真[J].弹道学报, 2014,26(1): 94-97.
GONG Penghan, ZHOU Kedong, KANG Xiaoyong, et al. Simulation of launch dynamics of a rifle[J]. Journal of Ballistics, 2014, 26(1): 94-97.
[7] 陈锦喜,王瑞林,吴海锋.新型机枪枪架及其动态特性分析[J].振动与冲击,2012, 31(8):121-123.
CHEN Jinxi, WANG Ruilin, WU Haifeng. Dynamic characteristics analysis for a new type gun tripod [J]. Jocrnal of Vibration and Shock, 2012, 31(8): 121-123.
[8] 郑秀瑗.现代运动生物力学[M].北京:国防工业出版社,2002.
Simulation for weapon firing stability based on equivalent parameters of shoulder and waist
YAN Shun1, WANG Changming1,HE Yunfeng1, ZHENG Peng2
(1.School of Mechanical Engineering, Nanjing University of Science & Technology, Nanjing 210094, China2.Research Institute of Navigation and Control Technology of Weapon Industry in China, Beijing 100089, China)
Control factors of a shooter have a significant impact on firing stability of a weapon in shooting process. In order to study the control effect of shoulder and waist on firing stability of a grenade launcher, a man-weapon system model with shoulder supported was developed. According to the characteristics of shooting, the human body and weapon were simplified into two rigid bodies with 5-DOF. The acting forces on shoulder and waist were simplified into the actions of equivalent springs and dampers. Through simulating with different values of equivalent parameters, the results showed that different controls of the human body have different influences on firing stability of weapon; the equivalent parameters of waist and the pitch damping coefficient of shoulder are critical for the design of intelligent firearm mounts.
equivalent parameters; man-weapon interaction model; firing stability
2015-06-23 修改稿收到日期:2015-10-10
阎舜 男,博士生,1980年2月生
王昌明 男,教授,博士生导师,1952年9月生
E-mail:yanshun800212@163.com
TH212;TH213.3
A
10.13465/j.cnki.jvs.2016.19.032
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
小学生必读(中年级版)(2021年12期)2021-12-02
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
兵器装备工程学报(2020年3期)2020-04-22
模具制造(2019年10期)2020-01-06
诗选刊(2019年9期)2019-11-20
弹箭与制导学报(2018年5期)2018-02-21
解放军健康(2017年5期)2017-08-01
探测与控制学报(2015年4期)2015-12-15
中国康复理论与实践(2015年7期)2015-05-09