100kV高压脉冲电源的滑模反馈控制
2016-11-22 08:17潘圣民何宝灿冯虎林王邓辉胡纯栋
化工自动化及仪表 2016年3期
潘圣民 傅 鹏 杨 雷 何宝灿 冯虎林 王邓辉 胡纯栋
(中国科学院等离子体所,合肥 230031)
100kV高压脉冲电源的滑模反馈控制
潘圣民 傅 鹏 杨 雷 何宝灿 冯虎林 王邓辉 胡纯栋
(中国科学院等离子体所,合肥 230031)
在对100kV高压脉冲电源主回路结构进行分析的基础上,提出采用滑模反馈控制方法来控制该高压电源,并给出其等效数学模型。仿真和实验结果表明:经滑模反馈控制后的高压电源输出电压过充小、安全裕量大,电压上升时间约100μs。
滑模反馈控制 高压脉冲电源 电压上升时间 输出电压过充 安全裕量
100kV高压脉冲电源是为国家重大科学工程——HT7U超导Tokamak聚变实验装置(Experiment of Advanced Supperconductor Tokamak,EAST)中性束注入(Neutral Beam Injection,NBI)系统研制的一套高压大功率脉冲电源。该电源采用脉冲阶梯调制技术[1],由104个结构相同的额定输出为1.1kV/100A的电源模块串联而成,其额定输出100kV/100A,最大工作脉宽1 000s。100kV高压脉冲电源是NBI加热装置的主要系统之一,该电源具有输出电压在0~100kV(DC)可调、最大电流100A、电压稳定度高于1%、纹波(峰-峰)小于2%及电流上升时间不大于20μs等特点,因此,必须选择适合的控制方法来加以控制。但由于100kV高压脉冲电源的负载为离子源,而离子源在打火时要求电源系统注入能量小于8J,因此,在负载打火时,电源必须在5μs内关断。为了配合NBI系统其他电源的工作特性,高压电源的上升时间应为100μs,因此,该电源又需要具有快速开通能力。而该100kV高压脉冲电源为强非线性系统,传统的PID控制很难适用。在此,笔者选择滑模反馈控制方法,实现对整个100kV高压脉冲电源模块的控制。
1 100kV高压脉冲电源的主回路结构
100kV高压脉冲电源主回路(图1)有两台双副边绕组油浸隔离变压器,每台油浸变压器分别连接两台干式多副边绕组变压器(具有26组副边绕组),干式多副边绕组变压器的每组副边绕组给一台电源模块供电,最后相邻电源模块的正负极相连,104个电源模块串联运行,实现高压输出。其中,油浸变压器的输入输出均为10kV,主要用于隔离高压;同时,两台油浸变压器的原边绕组分别移相±7.5°,则两台油浸变压器的原边绕组相位相差15°,且油浸变压器的两组副边绕组为星形连接,因此该电源可实现24脉波整流运行,降低电源输出电压的纹波。
100kV高压脉冲电源由104个结构相同的PSM电源模块(图2)串联而成。PSM电源模块主要包括软启动部分、整流桥、滤波电容、交直流熔丝、绝缘栅双极型晶体管 (Insulated Gate Bipolar Transistor,IGBT)、可控硅整流器(Silicon Controlled Rectifier,SCR)、续流二极管和控制部分[2~5]。
2 等效数学模型
100kV高压脉冲电源是由结构相同的PSM电源模块串联而成的,因此电源的整体等效数学模型与单模块电源模型基本相同[6~8]。100kV高压脉冲电源上升沿模型可以等效为一阶滑模电压控制(图3)[9~15]。
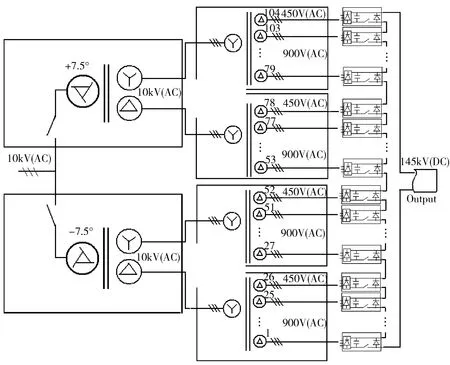
图1 100kV高压脉冲电源主回路结构

图2 PSM电源模块
选取参考输出电压误差x1=(Vref-βv0)及其变化率x2=-(β/c)ic为状态变量,则可以得到如下状态方程:
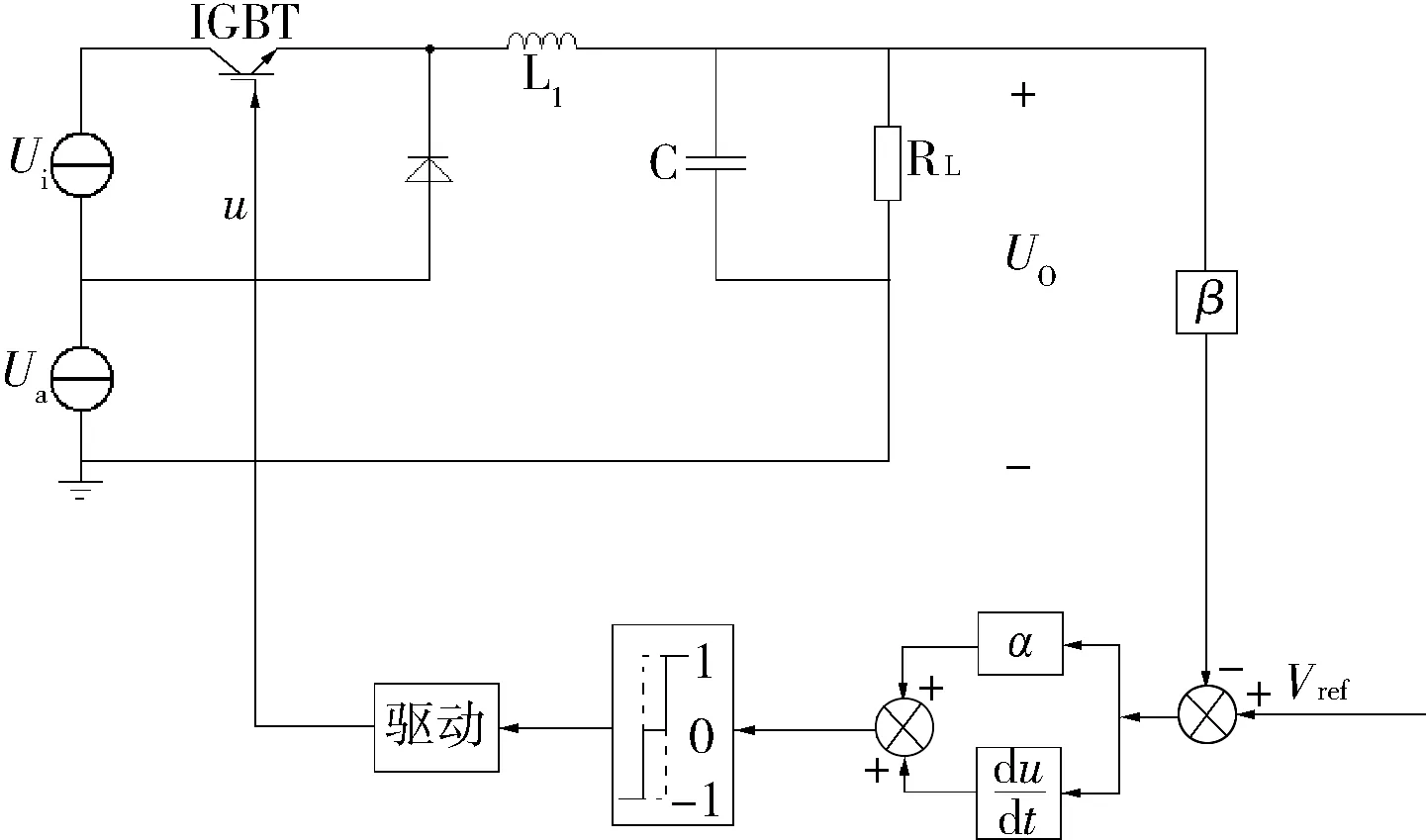
图3 一阶滑模电压控制原理
(1)
式中L、RL、C——等效模型中的电感值、电阻值和电容值;
Ua——当前输出电压值;
Ui——单个电源模块的电压值;
u——开关控制量,u的取值为-1(切除电源模块)、0(保持当前电源模块的状态)、1(投入电源模块);
Vref——参考电压;
β——滑模系数。
由于高压电源在上升沿时可以简化为一个二阶控制对象,根据滑模反馈控制技术的降阶控制特性,因此只需设计一阶滑模面方程即可。选取切换线S=αx1+x2=0,从而得到切换函数为:
S=αx1+x2
(2)
其中,α>0,以确保滑模运动稳定。根据两个状态变量的定义,切换函数产生的开关切换控制规律为:
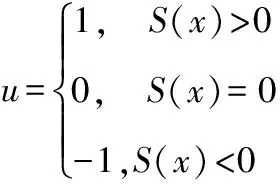
(3)
式(3)的理论切换频率为无穷大,因此必须采用降频措施,通常采用滞环调制降频。
由于滑模反馈控制属于控制受限的滑模控制,因此滑模区是有限的,系统不一定第一时间进入滑模区。为了保证高压电源系统能够顺利进入滑模区,必须分析高压电源一阶滑模控制的滑模区。根据滑模面方程S=αx1+x2=0可以得到高压电源的滑模运动规律为[16~20]:
x1=x1(t1)e-α(t-t1)
(4)
其中,t1为系统运动至滑模面并开始滑模运动的时刻(t1之前系统做趋近运动)。由式(4)可知,滑模运动趋近滑模面的速度直接取决于滑模系数,其值越大,系统进入滑模面的速度越快。
为了分析滑动模态区,将滑动模态存在条件等价为:
(5)
将式(5)代入式(1)可得:
(6)
假设式(6)中两条直线λ1=0、λ2=0与滑模面S=0的交点分别为x1A和x1B,则有:
(7)
则系统的滑模区为:
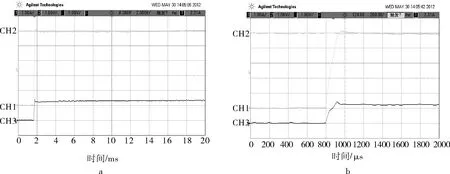
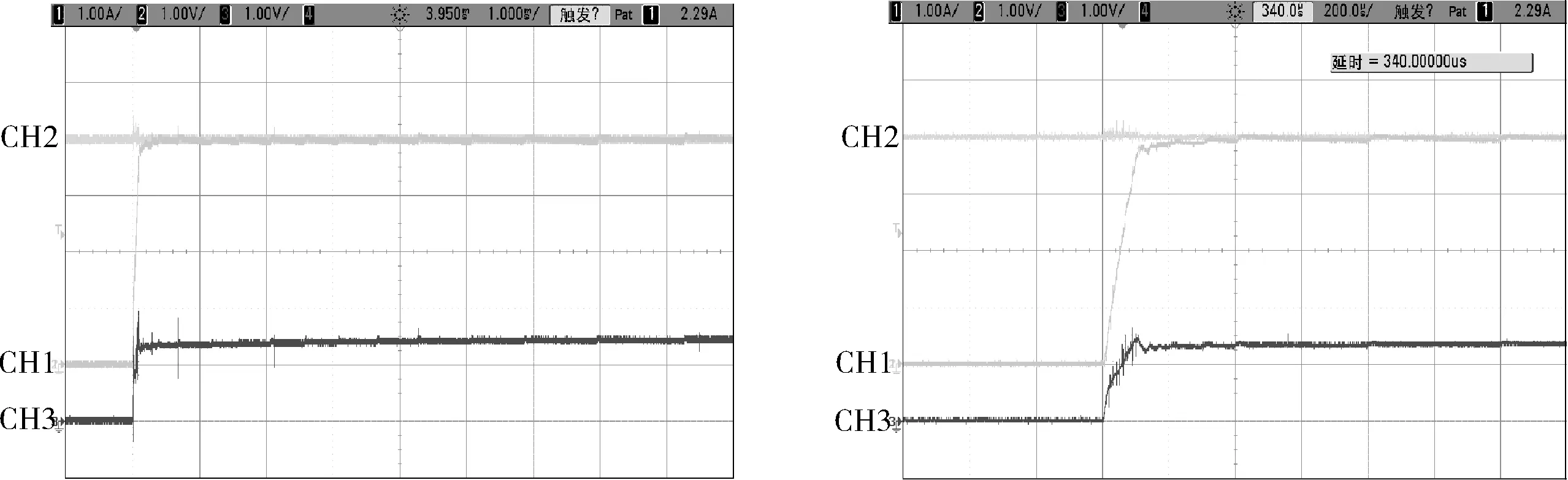
x1A (8) 根据上述分析,对滑模反馈控制方法进行仿真。设高压电源的输出电压超调量2%,负载电阻1kΩ,仿真电路采用滞环调制方式,滞环宽度2 000。仿真电路(图4)采用模/数混合仿真,主要由电源模块、数字控制器及滑模控制器等组成。 图5所示为滑模反馈控制仿真结果,图5b是图5a的局部放大图。可以看出,电压上升时间为108μs,此时高压电源的输出电压为99.735kV,高压电源的最大过充为970V,完全满足设计要求。 图4 滑模控制仿真电路 图5 滑模反馈控制仿真波形 测试仪器采用DSO5014A示波器,电压测量工具采用ROSS分压器VD-120。图6所示为100kV高压脉冲电源经滑模反馈控制后的输出波形,图6a中CH1为高压电源的输出电压波形,纵轴幅值每格表示20kV;CH2为高压电源的输出电压设定值100kV;CH3为电流波形,纵轴幅值每格表示40A。图6b为图6a上升沿的放大波形。 图6 100kV高压脉冲电源的滑模反馈控制测试波形 由图6可知,高压电源的输出电压为100kV,高压电源经滑模反馈控制后,电压的过充约为3%,上升时间约100μs,电流峰值小于60A,较过流保护值120A还有一定的安全裕量,完全达到设计要求。 由于最终EAST-NBI高压电源的额定电压为80kV,额定电流为70A。因此,高压电源的滑模反馈控制电压测试主要在80kV下进行。图7所示为额定电压为80kV时的高压电源滑模反馈控制输出波形,CH1为输出电压波形,纵轴幅值每格表示20kV;CH2为电压设定值(80kV);CH3为电流输出波形,纵轴幅值每格表示40A;横轴时间,每格幅值表示1ms。由图7可知,电压从0升到设定值80kV的时间约100μs,此时电流约50A,电压只在电流上升时有一个过充,电流峰值约60A。 图7 额定电压为80kV时的高压电源滑模反馈控制输出波形 笔者提出采用现代非线性控制方法,即滑模反馈控制方法来控制100kV高压脉冲电源的输出电压。通过仿真和实验验证,经滑模反馈控制后的高压电源输出电压上升时间约100μs,电压过充小,安全裕量大,完全满足设计要求。 [1] Schwarz U E.Digitized High Power Modulation[J].Fusion Technology,1986,19(7):125~136. [2] 潘圣民,刘小宁,杨雷.基于DSP的光纤数据采集网络的研制[J].微计算机信息,2006,22(12-2):106~108. [3] 吴翼平.现代光纤通信技术[M].北京:国防工业出版社,2004. [4] 雷肇枥.光纤通信原理[M].成都:电子科技大学出版社,1997. [5] 王付胜,刘小宁,潘胜明.基于DSP和CPLD的三相电流源型变流器[J].电工电能新技术,2005,24(4):26~29. [6] 刘琨,周有庆,王洪涛.电子式互感器高压侧的数据采集系统[J].高电压技术,2007,33(1):111~114. [7] Wolf R,Wei H,Bruins S,et al.Digital Power Supply Controller for Control of Extremely Precise Power Supplies[C]. 2007 European Conference on Power Electronics and Applications.Aalborg:IEEE,2007:1~6. [8] Rumpf E,Ranade S.Comparison of Suitable Control Systems for HVDC Stations Connected to Weak AC Systems Part I:New Control Systems[J].IEEE Transactions on Power Apparatus & Systems,1972,91(2):549~555. [9] 高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996. [10] 姚琼荟,黄继起,吴汉松.变结构控制系统[M].重庆:重庆大学出版社,1997. [11] 高为炳.非线性系统的变结构控制[J].自动化学报,1989,15(5):408~415. [12] Sira-Ramirez H.Sliding-mode Control on Slow Manifolds of DC-to-DC Power Converters[J].International Journal of Control,1988,47(5):1323~1340. [13] 王金玉,孔德健,姜泳,等.高频多级PI控制的电化学直流电源研究[J].化工机械,2015,42(3):350~354. [14] 孙伟,林小军.基于S3C2410的嵌入式弧焊电源测试平台设计[J].化工机械,2010,37(1):28~30. [15] Venkataramanan R,Sabanovic A,Cuk S.Sliding Mode Control of DC-to-DC Converters[C].Proceedings IECON.San Francisco:IEEE,1985:251~258. [16] Sira-Ramirez H.Sliding Motions in Bilinear Switched Networks[J].IEEE Transactions on Circuits & Systems,1987, 34(8):919~933. [17] Giral R,Martinez L,Hernanz J,et al.Compensating Networks for Sliding-mode Control[C].1995 IEEE International Symposium on Circuits and Systems.Seattle:IEEE,1995:2055~2058. [18] Huang S P,Xu H Q,Liu Y F.Sliding-mode Controlled Cuk Switching Regulator with Fast Response and First-order Dynamic Characteristic[C].1989 20th Annual IEEE Power Electronics Specialists Conference.Milwaukee:IEEE,1989: 124~129. [19] Malesani L,Rossetto L,Spiazzi G,et al.Performance Optimization of Cuk Converters by Sliding-mode Control[J].IEEE Transactions on Power Electronics,1995,10(3):395~402. [20] Martinez-Salamero L,Calvente J,Giral R,et al.Analysis of a Bidirectional Coupled-inductor Cuk Converter Operating in Sliding Mode[J].IEEE Transactions on Circuits & Systems I Fundamental Theory & Applications,1998,45 (4):355~363. Sliding-modeControlfor100kVHigh-voltagePulsePowerSupply PAN Sheng-min, FU Peng, YANG Lei, HE Bao-can,FENG Hu-lin, WANG Deng-hui, HU Chun-dong (InstituteofPlasmaPhysics,ChineseAcademyofSciences,Hefei230031,China) Basing on analyzing 100kV high-voltage power supply’s main circuit, applying the sliding mode to control it was proposed, including its equivalent numerical simulation model. Both simulation and experimental results shows that the high-voltage power supply’s output voltage under sliding-mode control has small overcharge and large safety margin and the voltage rise time stays at 100μs. sliding-mode feedback control, high-voltage pulse power supply, voltage rise time, output voltage overcharge, safety margin TH862+.78 A 1000-3932(2016)03-0227-06 2016-01-22(修改稿) 国家“九五”重大科学工程HT7U超导托卡马克核聚变实验装置资助项目(计投资(1998)1303号);国家高技术研究发展计划项目(2008GB104000)3 仿真


4 实验调试
5 结束语
猜你喜欢
电子测试(2022年3期)2023-01-14
科学与财富(2018年25期)2018-10-19
航空工程进展(2018年3期)2018-08-31
通信电源技术(2018年5期)2018-08-23
制造技术与机床(2017年8期)2017-11-27
中国环保产业(2017年2期)2017-03-03
电子制作(2017年19期)2017-02-02
原子能科学技术(2014年1期)2014-02-28
铁路通信信号工程技术(2014年6期)2014-02-28