
ABS事件触发线性控制设计
2016-11-22 01:35孙坚
汽车文摘 2016年11期
ABS事件触发线性控制设计
事件触发控制是一种资源感知抽样策略,当某个条件满足时,更新控制值可表达事件时刻,该策略能够减少控制值计算成本和通信时间。在本文中,用于防抱死制动系统(ABS)的事件触发线性控制的开发和仿真基于控制系统科研平台(INTECO)制造,并由ABS试验室建立的数学模型实现。
本文中,车辆1/4数学模型是在特定条件下实现线性化。如图1所示,底部车轮仿真真实车辆的相对运动,与路面直接接触;上部车轮仿真车辆车轮的运动情况。虽然该模型简单,但其能够充分表达真实系统的基本特性。该模型只考虑车辆的纵向动力学,忽略垂向和侧向动力学;滚动阻力相比于制动力可以忽略。本文主要研究ABS事件触发的线性控制设计的开发和实现,以及基于数学基础的车辆数学模型的建立。运用线性控制法使得ABS渐近稳定,同时避免了齐诺现象和有限时间量的无限跳跃情况的产生。而且,利用该方法既不损害系统的稳定性,又可在适当情况下完成运行。
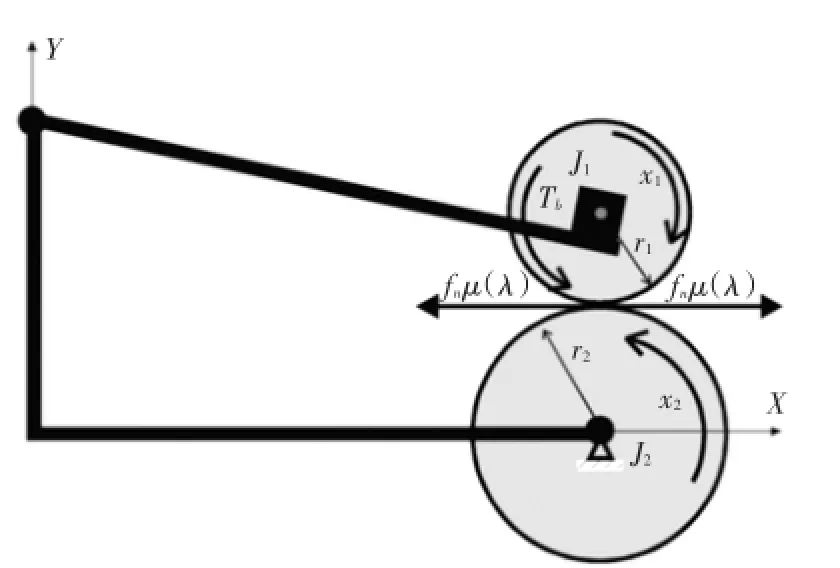
图1ABS试验室建立的车辆数学模型示意
M.Mart′ınez-Gardea et al. ROPEC 2015-Electronics.
编译:孙坚
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
商品与质量(2021年43期)2022-01-18
汽车工程师(2021年12期)2022-01-17
汽车工程师(2021年11期)2021-12-21
中等数学(2021年9期)2021-11-22
运输经理世界(2021年28期)2021-06-22
中学生数理化(高中版.高一使用)(2021年2期)2021-03-19
电子制作(2019年23期)2019-02-23
卷宗(2018年14期)2018-06-29
