
基于激光测距仪的巷道变形测量装置设计
2016-11-21 09:47李云生
电子设计工程 2016年21期
李云生
(衡阳市规划设计院测量队 湖南 衡阳 421001)
基于激光测距仪的巷道变形测量装置设计
李云生
(衡阳市规划设计院测量队 湖南 衡阳 421001)
针对高应力作用下巷道变形破坏会阻断交通的问题,本研究致力于开发设计一种基于激光测距仪的巷道变形测量装置。通过加入显示器、激光发射器和激光接收器能够对巷道的侧壁进行实时的检测并直接的将测量结果显示出来。装置以STM32单片机为核心,配合激光脉冲计数器原理,便于测量人员对数据进行计算,并将数据进行收集汇总。最后通过测量实验结果显示:测量10~200米的不同长度的巷道变形过程中,变形处的测距误差在0.3m以内,变形度绝对误差在24 mm。因此,本实用新型巷道变形测量装置结构简单,测量所得数据误差小,适合推广使用。
激光测距;脉冲发射;变形测量;STM32单片机
巷道变形检测是建筑安全检测的重要内容之一,数字摄影测量因其具有非接触测量、测量速度快、对生产影响小等特点,用于巷道变形测量有无可比拟的优势[1-3]。现有的用于巷道变形的测量装置,测量的精度较低[4],尤其是在巷道这种危险性较高的场所,即使是细微的变化,造成的影响也是很大的[5],一旦误差过大就很容易造成安全隐患[6]。而且现有的用于测量细微巷道形变的设备,由于很少采用固定安装的支撑结构[7],所以稳定性较差,测量的误差也就比较大,现有的测量设备,没有能够直观显示测量结果的装置,使用起来较为麻烦[8]。本研究设计了一种基于激光测距仪的巷道变形测量装置。总的来说,本实用新型巷道变形测量装置结构简单,测量所得数据误差小,适合推广使用。
1 系统组成
1.1系统结构
激光测距系统是由STM32单片机[9]、脉冲发射电路[10]、脉冲检测电路[11]和高速计时芯片FPGA组成。如图1所示。
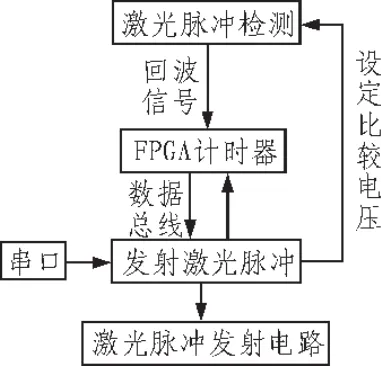
图1 激光脉冲测量系统架构图
系统以STM32单片机为核心,发射高电平为激光脉冲信号给高速计时芯片FPGA[12],各部分数据协调工作。FPGA收到激光脉冲信号后计时器清零并发送脉宽在0.02us以上并且宽度可调的窄激光脉冲,同时计数器开始计时。窄激光脉冲经过高电压发射电路后,激光脉冲峰值由原来电压变为高压,可以适应更长巷道的测量。激光脉冲在空气中传播后返回到激光脉冲检测电路,FPGA收到计时结束信号,计数器停止计时。同时,FGPA对接收机到的激光脉冲信号高电压时,STM32单片机计算巷道变形测量结果。
1.2激光脉冲计数
发射激光脉冲同时接收端开始接收激光脉冲,对波形进行高速采样,将模拟信号转换为数字信号进行储存计算,这样就可以得到返回的波形的信息[12]。激光脉冲返回波形如图2所示。
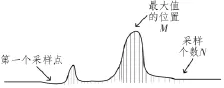
图2 激光脉冲返回波形图
高速采样值保存在数组中,求的返回的激光脉冲最大值与最小值位置分别为M与M0[13]。由STM32的采样频率f,可得到接收到脉冲的时间公式为[14]:

则巷道变形处的距离为:

因此巷道变形绝对误差为:

其中,v为激光脉冲传播速度,以光速为标准。结合STM32采样频率为10 MHz[15],根据公式计算出两个墙面平值点与峰值凸起点之间的距离,当激光脉冲回波峰值在两个采样点之间时,则取不到精确的距离[16],如果提高采样频率,则会减小误差。
2 技术方案设计
2.1方案设计
本研究设计的实用新型测量装置技术方案如下:一种基于激光测距仪的巷道变形测量装置,包括外壳和支撑台,外壳的左上侧外表面设有显示器,外壳的左下侧设有控制器,控制器的右侧设有蓄电池,蓄电池与控制器电连接,外壳的右下侧设有激光发射器,外壳的右侧对应激光发射器设有透光孔,激光发射器的上部设有激光接收器,激光发射器和激光接收器均与控制器电连接,激光接收器的外侧连接有进光罩,外壳的底部安装有支撑台。外壳的右上侧设有进风口,进风口的内侧设有风机,外壳的左侧留有出风口。支撑台为圆片结构。支撑台的下侧连接有支架。支架设有3组,且每组支架的下侧均固定连接有支架片。激光测距仪装置结构示意图如图3所示。
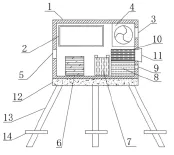
图3 结构示意图
图3中:1外壳、2显示器、3进风口、4风机、5出风口、6控制器、7蓄电池、8激光发射器、9透光孔、10激光接收器、11进光罩、12支撑台、13支架、14支架片。其中,外壳(1)和支撑台(12)构成了整个装置的主体,外壳(1)的左上侧外表面设有显示器(2),外壳(1)的左下侧设有控制器(6),控制器(6)的右侧设有蓄电池(7),蓄电池(7)与控制器(6)电连接。该装置利用激光测距仪测量巷道的变形程度,其特征在于:外壳(1)的右下侧设有激光发射器(8),外壳(1)的右侧对应激光发射器(8)设有透光孔(9),激光发射器(8)的上部设有激光接收器(10),激光发射器(8)和激光接收器(10)均与控制器(6)电连接,激光接收器(10)的外侧连接有进光罩(11),外壳(1)的底部安装有支撑台(12)。外壳(1)的右上侧设有进风口(3),进风口(3)的内侧设有风机(4),外壳(1)的左侧留有出风口(5)。支撑台(12)为圆片结构。支撑台(12)的下侧连接有支架(13)。支架(13)设有三组,且每组支架(13)的下侧均固定连接有支架片(14)。
2.2具体实施
下面将结合本实用新型实施例中的图1,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
本实用新型提供一种技术方案:一种基于激光测距仪的巷道变形测量装置,包括外壳1和支撑台12,外壳1的左上侧外表面设有显示器2,显示器2能够对收集到的数据进行直观的显示,便于测量人员进行检测,外壳1的右上侧设有进风口3,进风口3的内侧设有风机4,外壳1的左侧留有出风口5,进风口3与出风口5构成了一个小的空气循环系统,便于对设备内部进行通风散热,避免长时间的运行,产生高温对设备造成损坏,外壳1的左下侧设有控制器6,控制器6的右侧设有蓄电池7,蓄电池7与控制器6电连接,外壳1的右下侧设有激光发射器8,外壳1的右侧对应激光发射器8设有透光孔9,激光发射器8的上部设有激光接收器10,激光发射器8和激光接收器10均与控制器6电连接,激光接收器10的外侧连接有进光罩11,进光罩11能够对反射的激光束进行收集并传输到激光接收器10,外壳1的底部安装有支撑台12,支撑台12为圆片结构,支撑台12能够稳定的安放设备,防止发生偏移,提高测量精度,支撑台12的下侧连接有支架13,支架13设有三组,且每组支架13的下侧均固定连接有支架片14,支架片14能够防止支架13下陷,尤其是在巷道这种泥泞的地方,一旦支架13偏移,测量的精准度就会大打折扣,因此支架片14能够进一步的提高测量精度。
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
3 实验结果
为了验证基于激光测距仪的巷道变形测量装置的性能,在实验过程中进行了多次实验,采用激光测距仪分别对10米、50米、100米和200米巷道进行多次测量,得到如下结果。距离取的是5次测量的结果,如表1所示。
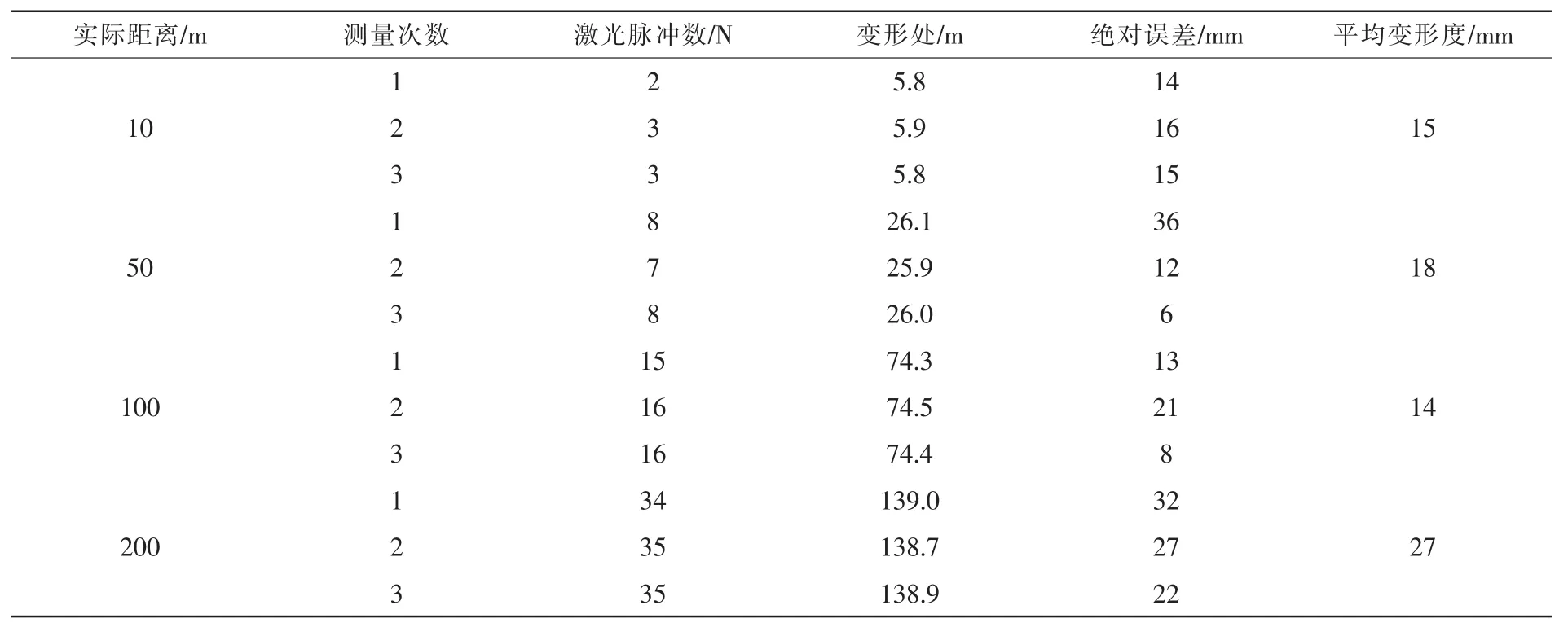
表1 激光脉冲变形测量结果
由表1所示,变形处的测距误差在0.3 m以内,虽然理论变形绝对误差在24 mm,但是相对于上百米甚至上千米的巷道来说还是很准确的。为了进一步提高精确度,采取测量多次球平均值的方法提高测量精确度。
4 结束语
本实用新型的有益效果是:此基于激光测距仪的巷道变形测量装置结构简单,通过加入显示器结构,能够直接的将测量结果显示出来,便于测量人员对数据进行计算,通过加入激光发射器和激光接收器结构,能够对巷道的侧壁进行实时的检测,并将数据进行收集汇总,通过加入支撑台结构,能够稳定的安放测量设备,从而确保设备不会发生偏移,增加了增量结果的准确性。通过实地的实验操作结果表明,测量10、50、100和200米的不同长度的巷道变形过程中,变形处的测距误差在0.3 m以内,变形度绝对误差在24 mm。总的来说,本实用新型结构简单,测量所得数据误差小,适合推广使用。
[1]徐剑坤,彭威,王震威.巷道变形数字摄影测量实验研究[J].煤矿安全,2013,44(10):63-65.
[2]张桁维,郝敬宾,朱文杰,等.复合式图像监测技术在井下测量中的应用[J].机电产品开发与创新,2015,28(2):89-91.
[3]王德永,袁艳斌,陈颖.基于GA-BPNN的巷道围岩变形模量预测[J].金属矿山,2013(3):9-13.
[4]袁凤培,闫相宏,刘杰.基于超声波测距的巷道两帮变形量测量系统设计[J].工矿自动化,2011,37(11):49-53.
[5]王连国,侯化强,孙建,等.高应力回采巷道围岩破裂机理及危险性评价[J].中国矿业大学学报,2012,41(3):361-365.
[6]赵伟,柏发松,吴桁,等.高突矿井巷道掘进过程中危险源预警系统的研究[J].工矿自动化,2010,36(3):1-3.
[7]李辉.浅析煤矿破碎软岩巷道控制技术[J].科技创新与应用,2015(28):130-130.
[8]齐占波,王宇,王士伟.煤矿巷道掘进成套设备及施工工艺研究[J].煤炭技术,2010,29(9):60-62.
[9]周慧.基于STM32单片机的HJ/T212通信协议的实现[J].电子世界,2012(24):36-37.
[10]蔡举,石军,刘南平.等.脉冲发射电路的参数优化UWB[J].河北工业大学学报,2012,41(2):10-13.
[11]马有良,任同.光电编码器脉冲检测电路设计[J].仪表技术与传感器,2009(10):76-77
[12]张松,李筠.FPGA的模块化设计方法[J].电子测量与仪器学报,2014,28(5):560-565.
[13]郭利生,王 薪,何金梅.开关控制LC振荡电路脉冲发射方法[J].电子科技,2015,28(7):18-20.
[14]孙志红,董军,夏彦文,等.高功率激光装置调频脉冲时间波形测试技术研究[J].中国激光,2013(11):46-50
[15]董宝玉,薛严冰,马驰,等.基于AD9854与STM32的频率特性测试仪设计[J].化工自动化及仪表,2014(6):655-659
[16]雷志勇,李永昌,刘星,等.一种用FPGA提高激光测距精度的改进方法[J].西安工业大学学报,2012,32(5):361-366.
Deformation measurement device based on a laser rangefinder roadway
LI Yun-sheng
(Hengyang City Planning and Design Institute survey team,Hengyang 421001,China)
Based on the deformation and failure will block traffic problems roadway under high stress,the present study is to develop designs based on laser rangefinder roadway deformation measuring device.By adding a display,a laser transmitter and laser receiver capable of side walls of the tunnel in real time to detect and direct measurement results are displayed.Means STM32 microcontroller core,with laser pulse counter principle,easy to measure personnel data is calculated,and the data collected summary.Finally,the measurement results show:measuring 10-200 meters,different lengths of roadway deformation process,deformation ranging error at less than 0.3m,the degree of deformation absolute error in 24mm.Thus,the utility model roadway deformation measurement simple structure,the measured data error is small,suitable for promotion use. Key words:laser range finder;pulse emission;deformation measurement;STM32 microcontroller
TN249
A
1674-6236(2016)21-0138-03
2016-03-24稿件编号:201603326
国家自然科学基金项目(41271167)
李云生(1969—),男,湖南衡南人,高级工程师、主任工程师、注册测绘师。研究方向:工程测量生产、管理及GIs应用。
猜你喜欢
法制博览(2022年29期)2022-10-21
四川冶金(2019年4期)2019-11-18
兵器知识(2019年1期)2019-01-23
汽车维护与修理(2018年3期)2018-12-07
铁道通信信号(2018年8期)2018-11-10
小猕猴智力画刊(2018年7期)2018-08-08
法制博览(2018年4期)2018-01-22
动漫星空(兴趣百科)(2017年9期)2017-10-30
支点(2016年11期)2016-12-22
铁道通信信号(2016年3期)2016-06-01
