解耦三转动两平移并联机器人机构型综合
2016-11-21 05:20曹毅陈海秦友蕾曹浩峰周辉
哈尔滨工程大学学报 2016年10期
曹毅, 陈海, 秦友蕾, 曹浩峰, 周辉
解耦三转动两平移并联机器人机构型综合
曹毅1,2,3, 陈海1,3, 秦友蕾1,3, 曹浩峰1,3, 周辉1,3
(1.江南大学 机械工程学院,江苏 无锡 214122;2.哈尔滨工业大学 机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150080;3.江苏省食品先进制造装备技术重点实验室,江苏 无锡 214122)
为了研究并联机构的运动耦合问题,基于螺旋理论和支链独立驱动原则提出了三转动两平移(3R2T)类解耦并联机构构型综合方法。首先根据期望3R2T解耦并联机构的运动特征(绕X、Y、Z轴方向的转动和沿X、Y轴方向的移动)和解耦并联机构的正逆雅可比矩阵必为对角阵的要求,利用螺旋理论来构造满足期望形式的正逆雅可比矩阵;其次根据正逆雅可比矩阵所要满足的条件,确定支链驱动副作用于动平台上的使动螺旋,再得到该使动螺旋对应支链上的表示驱动副的驱动螺旋和除驱动螺旋之外的其他运动螺旋系,据此可完成支链结构螺旋系的配置;最后根据并联机构构型原理依次取出五条支链连接动平台和定平台得到并联机构。综合的并联机构具有解耦特性,避免了运动耦合问题,具有一定的应用前景。
型综合;并联机构;支链驱动;螺旋理论
作为一类新型机构,并联机构相对于传统的串联机构而言具备一些独特的优势[1-2],如精度高、累积误差小等。伴随着Delta机器人[3]在各条生产线上的广泛应用,并联机构逐渐走向快速发展的时期。而作为机构学的研究热点,国内外学者对并联机构的型综合已经做了大量的研究工作,其中主要包括三类,分别为:1) 由Hervé提出的基于位移群论的构型方法[4];2) HUANG引用螺旋理论提出了机构构型方法[5];3) 杨廷力结合机器人的拓扑结构提出了机器人构型方法[6]。
在并联机构的研究和应用中,机构输入和输出之间的耦合却成为了阻碍并联机构应用的一个难题。虽然耦合性使机构提高了刚度和承载能力,但耦合性给并联机构的应用也带来了局限性,所以解耦的并联机构,又逐步演变为新的研究热点[7-8]。由于解耦并联机构避免了机构输入与输出之间的耦合性,故其在精密仪器仪表、航空航天、高端制造装配等领域有广泛应用前景。国内外众多学者已经开展了相关的研究,如Carricato[9]、Gogu[10]、Kong、Gosselin[11]、侯雨雷[12]、高峰[13]、黄真[14]、曾达幸[15-16]、张帆[17]、张彦斌[18]等,但大部分学者的研究对象均为具有三自由度移动及转动特征的并联机构,关于三转两移(3R2T)解耦并联机构的构型综合却缺乏研究。
通过分析解耦并联机构的输入输出特点,基于支链独立驱动原理和螺旋理论提出了3R2T解耦并联机构构型综合方法。给定期望3R2T解耦并联机构的运动特征,根据解耦并联机构的正逆雅可比矩阵必为对角阵的结构特性。首先利用螺旋理论来构造出符合解耦并联机构特点的正逆雅可比矩阵;其次根据所构造的正雅可比矩阵,即可得到驱动副作用于动平台上的使动螺旋;再求得该使动螺旋对应支链上的表示驱动副的驱动螺旋和除驱动螺旋之外的其他运动螺旋系;最后根据解耦并联机构的运动条件依次将五条支链连接到动定平台上,即可得到3R2T解耦并联机构。由于该并联机构的输出运动完全由支链上独立输入的驱动所提供,故属于解耦并联机构。
1 螺旋理论基础
文献[19]研究表明:螺旋(screw)也称旋量。在空间机构分析中,其可以表示为运动关节所受力或者关节轴线的方向。可以用一组对偶矢量表示:
(1)
式中:S和S0均为矢量,r表示螺旋的位置矢量,h为螺旋的节距。螺旋也可用Plücker坐标表示为
(2)

(3)
式中:螺旋$1和螺旋$2互为反螺旋。
使动螺旋表示机构动平台所受到的力的螺旋,当机构中的驱动副驱动时,机构的动平台会受到力或力偶的作用,用螺旋将该力/力偶表示出来,就称为使动螺旋[20]。
2 3R2T解耦并联机构输入输出分析

(4)

(5)

(6)
由于分支约束螺旋系限制,使v中平行于Z轴方向的任何分量都恒为0。此时对应的使动螺旋为$ai(i=1, 2, 3, 4, 5),改变式(6)中使动螺旋的形式可得
(7)
式中:
(8)
(9)
(10)

若Jinv为可逆矩阵,则:
(11)
(12)
其中J表示机构的雅可比矩阵。
若能确保机构的正、逆雅可比矩阵均为对角阵,则该机构必定为解耦的并联机构。
3 3R2T解耦并联机构型综合原理
结合上述结论提出了一种基于螺旋理论的3R2T解耦并联机构构型综合方法。通过确定使动螺旋、驱动螺旋的形式,来获得对角的正逆雅可比矩阵,进而可以得到满足条件的支链结构形式。具体流程图如图1所示。
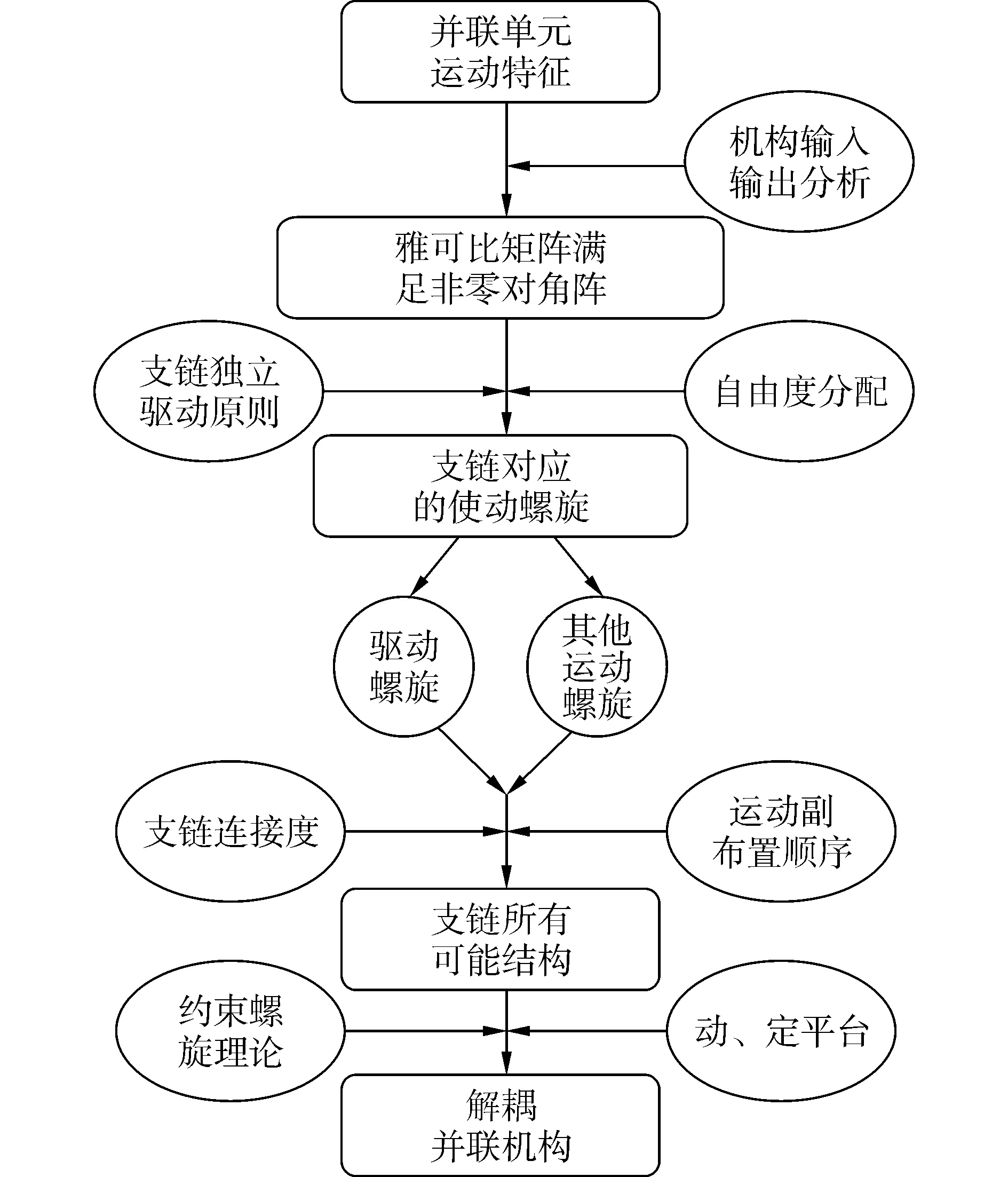
图1 解耦并联机器人构型综合流程图Fig.1 Flow chart of type synthesis of decoupled parallel robotic manipulators
由文献[16]可知,并联移动解耦机构的驱动副既可是移动副也可是转动副。因此当驱动副为转动副时,该分支需具有一个转动副与驱动副构成2R平行子链(下文中简称2R平行子链转动副)。但为了不破坏机构的解耦特性,需要注意的是:由2R平行子链作为驱动副,会带来另一方向的驱动作用(称为消极驱动,即机构中在某一方向不希望出现的驱动),所以要求在该分支结构中需有一个移动副与该分支中存在的消极驱动方向共线,以便消除消极驱动对机构解耦特性的不利影响。基于以上分析,可依据独立驱动原则,利用螺旋理论完成3R2T解耦并联机构的构型。
4 机构支链型综合过程
本文综合的3R2T解耦并联机构是基于独立驱动原则,即一条支链只含有一个驱动副,且控制动平台的一个对应的输出自由度。所以在下文的构型综合过程中,将假设前两条分支分别提供沿X与Y轴方向的移动驱动,第三、四、五条分支提供绕X、Y及Z轴方向的转动驱动。由于并联机构分支必具有动平台的运动特征,所以综合的每条支链的连接度至少为5。下文将根据上述构型原理,详细给出五条支链的构型过程。
4.1 第一条支链的型综合
设该分支仅对动平台沿X轴方向的移动提供输入驱动,其正雅可比矩阵中第一排仅一个非零元素[Jdir]11。由于期望使动螺旋只对动平台沿X轴方向有驱动力,所以使动螺旋的形式只考虑为
(13)
即使动螺旋与定平台坐标系X轴重合。根据第三节分析可知,当使动螺旋为力线矢类螺旋时,驱动副可以是移动副或者是2R平行子链转动副,所以驱动螺旋有三种类型,其螺旋表达式为
(14)
式(14)表示三种情况下,支链中的驱动副分别为沿X轴方向的移动副、绕Y轴方向和Z轴方向的2R平行转动副。将式(14)代入式(10)可得
(15)
由于d12和d13是与坐标系原点选择相关的变量,故只需调整驱动副的位置使d12和d13不为零,即可使式(15)中三种情况下[Jv]11均不为零。根据反螺旋定理[19]可知支链中可能存在的螺旋系包括以下三种:
1) 与X轴平行的线矢量螺旋系,空间内平行的线矢量螺旋系维数最多为3,故其数量最多为3。
2) 与X轴垂直的偶量螺旋,由于共面的偶量螺旋最大线性无关数为2,所以其数量最多为2,且轴线方向不共线。
3) 与使动螺旋交于一点的线矢量螺旋系,支链中此类螺旋数目至少为2个,一个轴线平行于Z轴方向,另一个轴线平行于Y轴方向,且其轴线相交于一点。
下文分三种情况对主动螺旋的三种类型进行详细讨论。
4.1.1 沿X轴方向的移动副驱动
当驱动副为移动副,且移动副轴线平行于X轴方向时,有
(16)
根据文献[17]可知,并联机构的运动特征是各支链运动特征的交集,所以并联机构支链必含动平台的运动特征,即该支链连接度至少为3R2T类型,所以支链的连接度有5和6两种,根据支链连接度的不同可依次推导出支链的机构类型,详细的支链一结构如表1第一类所示。为简化结构和直观分析,设定相邻运动副轴线方向均垂直或平行,其中所出现的4R1T类型的并联机构是以3R2T类型经过线性组合变换所得,变换过程中需注意的是一个转动副和一个移动副的线性组合成一个2R平行子链需具有一定条件:即原支链中存在垂直于该转动副轴线方向的两个移动自由度。具体的螺旋线性变换方法参考文献[19],下文中其他类型变换同理。
4.1.2 绕Y轴方向的转动副驱动
当驱动副为转动副,且其轴线平行于Y轴方向时,有
(17)
当输入副为转动副时,等效于用一个2R平行转动副替代沿X轴的移动驱动,所以此类分支的运动连接度至少可达到5个。其具体支链配置类型如下表1第二类别所示。
4.1.3 绕Z轴方向的转动副驱动
当驱动副为转动副,且其轴线平行于Z轴方向时,有
(18)
当输入副为转动副时,相当于用一个2R平行子链替代沿X轴的移动驱动,但由于支链中平行于Z轴的线矢量螺旋至少存在一个,所以可知此类分支的运动连接度最少可以为5个。其具体支链配置类型如下表1中第三类所示。
表1为支链一的可能结构类型。需要说明的是,由于本文综合的并联机构的运动特征为三转两移,所以支链的连接度至少为5,又由于机构采用独立支链驱动,所以会有5条支链,为简化机构结构,所以本文中构造的支链均不考虑存在冗余运动副的情况;且限于篇幅,一类支链只给出一种排列情形,对于改变支链中运动副的排列顺序的情况较为简单,不予一一列出。
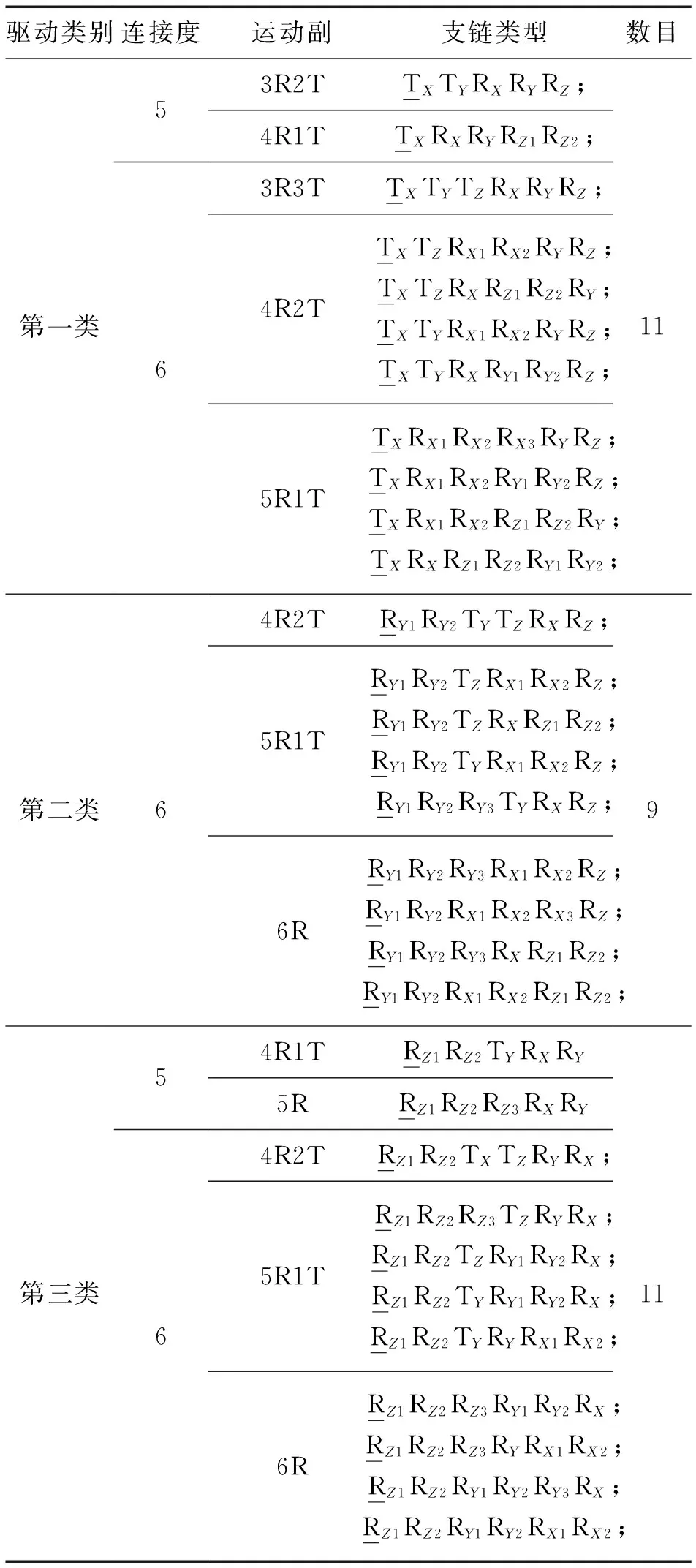
表1 第一条支链结构
4.2 第二条支链的型综合
第二条支链对动平台提供沿Y轴方向的移动输入。由于第二条支链的型综合原理类似于第一条支链的型综合过程,同理可得第二条支链上的使动螺旋和主动螺旋分别为
(19)
依据上节的分析方法,其主动螺旋有三类:
(20)
根据上节综合原理可得第二条支链具体结构类型见表2。
4.3 第三条支链的型综合
第三条分支仅对X轴方向的转动提供输入驱动,其使动螺旋$a3的形式为
(21)
若第二条支链上表示驱动副的驱动螺旋为$q3=[a3b3c3; d3e3f3]。由于综合的每条分支都具有三移两转运动特征,所以当驱动螺旋具有Y与Z方向转动分量时,可能会引起动平台具备Y、Z方向的转动自由度,破坏了机构的转动解耦特性,驱动螺旋只能为
(22)
将式(21)和式(22)代入式(10)可得
(23)
由式(23)可知,[Jv]33满足非零条件,所以有
(24)
根据上述分析,可得到第三条支链的具体结构如下表3所示。
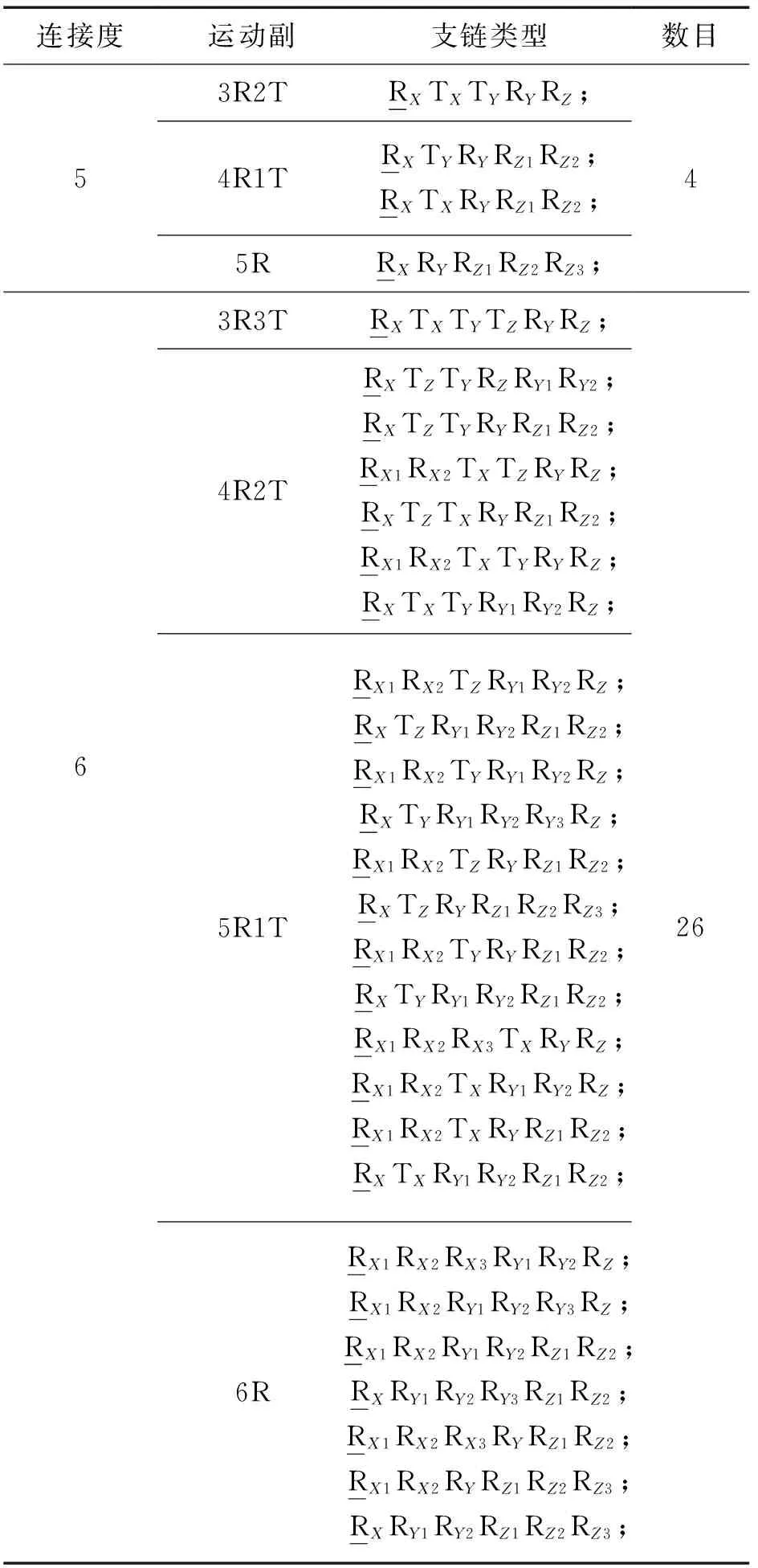
表3 第三条支链结构
4.4 第四条支链的型综合
第四条支链仅对Y轴方向的转动提供输入驱动。第四条支链的型综合过程类似于第三条支链的型综合过程,同理可得第四条支链上的使动螺旋和主动螺旋分别为
(25)
根据以上方法给出其支链具体结构类型见表4。
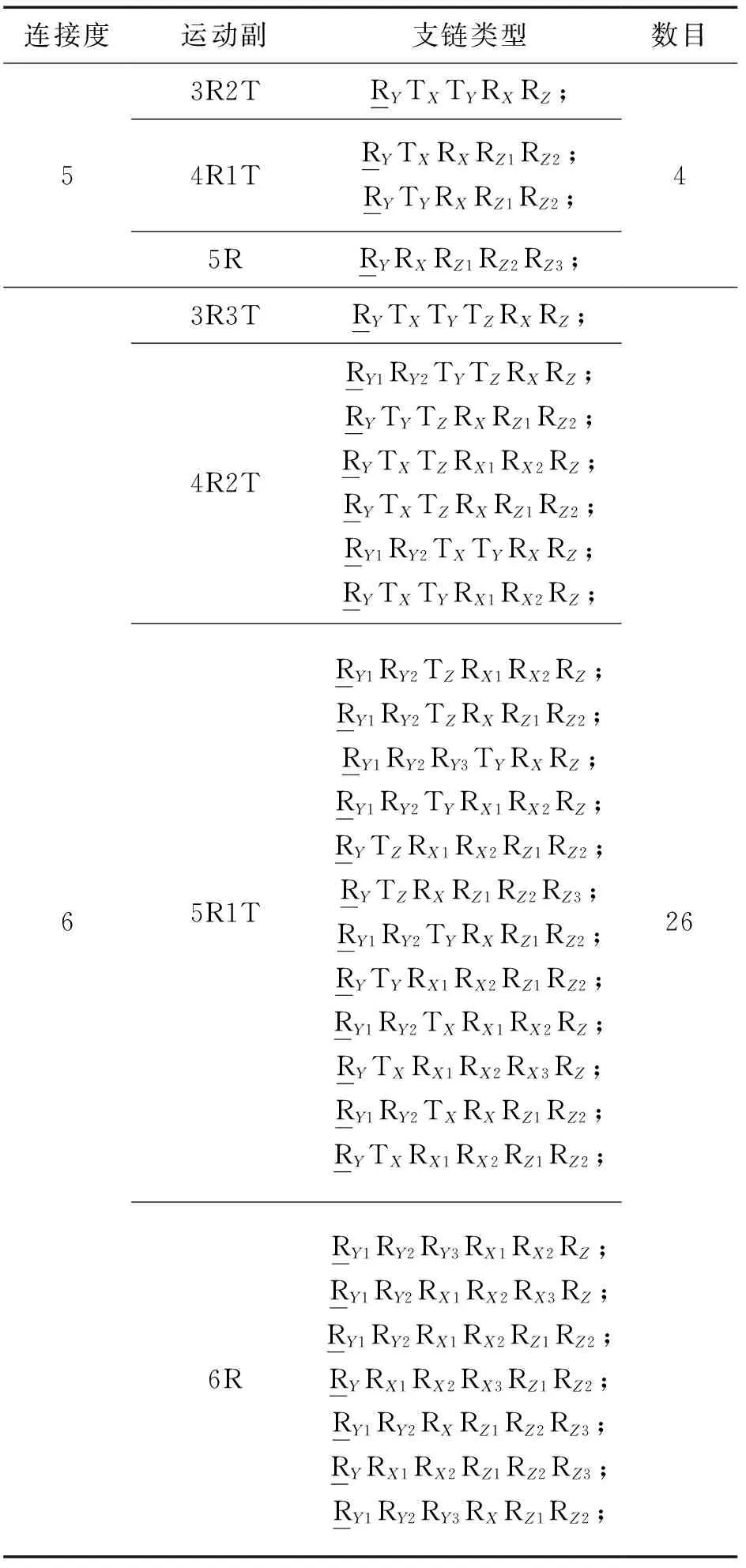
表4 第四条支链结构
4.5 第五条支链的型综合
第五条支链仅对Z轴方向的转动提供驱动输入,第五条支链的综合过程类似于第三、四条支链,以下只做简述,具体原理过程请参看上节。同理可知,第五条支链的使动螺旋和驱动螺旋分别为
(26)
根据式(6),即可得到除驱动螺旋之外的其他运动螺旋所组成的螺旋系,在此直接在表5中给出具体的支链结构类型。
表5 第五条支链结构
5 解耦3R2T并联机构型综合
本文采用基于运动特征的综合方法[21],通过构造五条支链再组合五条分支得到并联机构。
由于本文综合的并联机构具有三维转动特征,所以根据并联机构转动条件:任意两分支需能提供垂直于转动方向的二维移动自由度。所以在选择组合五条支链时,需注意以下准则:
1) 五条支链中只能有1条支链的连接度为5,其余四条支链均需为连接度为6的支链。图2为根据以上方法得到的一种解耦3T2R并联机构。
2) 对于机构中出现的连接度为5的支链,由于转动特征会改变移动特征的方向,所以在支链中移动副需放在转动副之前,这样支链的约束螺旋系将不会发生改变,也就避免了机构自由度的瞬时性。
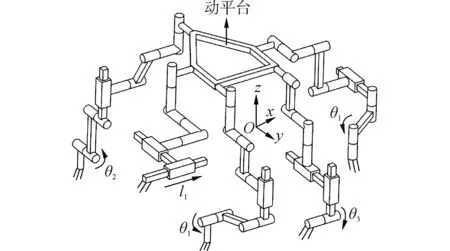
图2 3R2T解耦并联机构Fig.2 A 3R2T decoupled parallel mechanism
图2中所示并联机构的支链结构分别为TXTYRXRYRZ、RX1RX2TZRY1RY2RZ、RXTZTYRZRY1RY2、RY1RY2TZRX1RX2RZ、RZ1RZ2TYRX1RX2RY,其中固定基座及动平台如图2中所示,五条支链分别为动平台提供沿x、y轴方向的移动自由度和绕x、y、z轴方向的转动自由度。
如图2所示,选取五条支链的第一个运动副为输入副,且直接与固定基座相连。定义符号如下:l1为支链一上沿x轴方向表示驱动输入的移动距离;θ1为支链二上沿x轴方向的2R平行子链驱动副的输入;θ2为支链三绕x轴线方向旋转输入的角度;θ3为支链四绕y轴方向旋转输入的角度;θ4为支链五绕z轴方向旋转输入的角度。
坐标系如图2中所示,假设支链二中与驱动副相连的连杆长为L,初始角度为γ。用沿x轴方向的2R子链替代沿y轴的移动输入,分析如下图3所示。
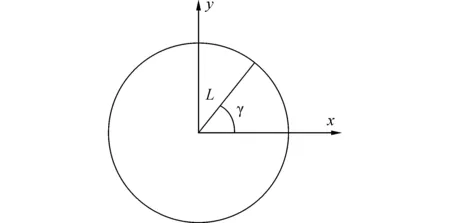
图3 机构沿y轴方向输入分析Fig.3 The analysis of mechanism input along the y-axis direction
由图3知,驱动副沿y轴方向的移动输入距离y为
(27)
根据以上分析,可知机构输入分别为(l1、θ1、θ2、θ3、θ4),设动平台的对应输出量分别为(x、y、α、β、φ),其中α、β、φ为绕固定轴的RPY角,则根据上述解耦并联机构组成特点,可以得到
(28)
对式(28)两边对时间t求导可得
(29)
式(29)也可以写作:
(30)
可以得到机构的雅可比矩阵为
(31)
由式(31)可以看到,在该并联机构的工作空间内,机构的雅可比矩阵为非零对角阵。当cos(γ+θ1)=0时,机构会出现奇异,这是由于采用2R平行转动副作为驱动导致的,当转动角速度方向与移动方向垂直时,会出现奇异位置,这种情况并不是机构不具有解耦性,仅是由转动驱动造成,如果用移动副直接驱动,则不会出现奇异。
6 结论
1) 基于螺旋理论,提出了解耦并联机构型综合的一种系统方法,通过分析解耦并联机构雅可比矩阵所要满足的条件,给出了构型原理的具体步骤。
2) 运用该型综合方法,完成了3R2T并联机构的构型综合问题,首先综合3R2T五自由度解耦并联机构各条支链,再根据支链组合原理连接动定平台得到3R2T解耦并联机构。
3) 基于螺旋理论分析了综合得到的一种机构的运动特征,同时求得机构的雅克比矩阵,验证了并联机构的解耦也证明了构型理论正确性。
4) 综合的并联机构具有解耦特点,具有一定的应用前景。
[1]MENG Xiangdun, GAO Feng, WU Shengfu, et al. Type synthesis of parallel robotic mechanisms: framework and brief review[J]. Mechanism and machine theory, 2014, 78(8): 177-186.
[2]刘玉梅, 曹晓宁, 王秀刚, 等. 基于齐次变换矩阵数值解的6自由度并联机构位姿正解解算[J]. 哈尔滨工程大学学报, 2013, 34(7): 894-898.
LIU Yumei, CAO Xiaoning, WANG Xiugang, et al. Forward kinematics of the 6-DOF parallel mechanism based on homogeneous transformation matrix numerical solution[J]. Journal of Harbin Engineering University, 2013, 34(7): 894-898.
[3]冯李航, 张为公, 龚宗洋, 等. Delta系列并联机器人研究进展与现状[J]. 机器人, 2014, 36(3): 375-384.
FENG Lihang, ZHANG Weigong, GONG Zongyang, et al. Developments of delta-like parallel manipulators-a review[J]. Robot, 2014, 36(3): 375-384.
[4]HERVÉ J M. The mathematical group structure of the set of displacements[J]. Mechanism and machine theory, 1994, 29(1): 73-81.
[5]HUANG Zhen, LI Qinchuan. General methodology for type synthesis of lower-mobility symmetrical parallel manipulators and several novel manipulators[J]. The international journal of robotics research, 2002, 21(2): 131-145.
[6]杨廷力. 机器人机构拓扑结构学[M]. 北京: 机械工业出版社, 2004.
YANG Tingli. Topology structure design of robot mechanisms[M]. Beijing: China Machine Press, 2004.
[7]宫金良, 张彦斐, 高峰. 并联机构的解耦特性[J]. 中国机械工程, 2006, 17(14): 1509-1512.
GONG Jinliang, ZHANG Yanfei, GAO Feng. Decoupling characteristics of parallel mechanism[J]. China mechanical engineering, 2006, 17(14): 1509-1512.
[8]GLAZUNOV V. Design of decoupled parallel manipulators by means of the theory of screws[J]. Mechanism and machine theory, 2010, 45(2): 239-250.
[9]CARRICATO M, PARENTI-CASTELLi V. A family of 3-DOF translational parallel manipulators[J]. Journal of mechanical design, 2003, 125(2): 302-307.
[10]GOGU G. Structural synthesis of fully-isotropic translational parallel robots via theory of linear transformations[J]. European journal of mechanics-A/solids, 2004, 23(6): 1021-1039.
[11]KONG Xianwen, GOSSELIN C M. Type synthesis of input-output decoupled parallel manipulators[J]. Transactions of the Canadian society for mechanical engineering, 2004, 28(2): 185-196.
[12]侯雨雷, 张占叶, 胡鑫喆, 等. 新型两转动自由度完全解耦并联机构及其特性[J]. 哈尔滨工业大学学报, 2014, 46(9): 80-85.
HOU Yulei, ZHANG Zhanye, HU Xinzhe, et al. A novel 2-DOF fully decoupled rotational parallel mechanism and its characteristics[J]. Journal of Harbin Institute of Technology, 2014, 46(9): 80-85.
[13]LI Weimin, GAO Feng, ZHANG Jianjun. R-CUBE, a decoupled parallel manipulator only with revolute joints[J]. Mechanism and machine theory, 2005, 40(4): 467-473.
[14]ZHAO Y, LIU J F, HUANG Zhen. A force analysis of a 3-RPS parallel mechanism by using screw theory[J]. Robotica, 2011, 29(7): 959-965.
[15]ZENG Daxing, HUANG Zhen. Type synthesis of the rotational decoupled parallel mechanism based on screw theory[J]. Science China technological sciences, 2011, 54(4): 998-1004.
[16]ZENG Daxing, HOU Yulei, LU Wenjuan. Type synthesis method for the translational decoupled parallel mechanism based on screw theory[J]. Journal of Harbin Institute of Technology, 2014, 21(1): 84-91.
[17]张帆, 张丹. 基于支链驱动理论的解耦球面转动并联机构型综合[J]. 农业机械学报, 2011, 42(11): 195-199.
ZHANG Fan, ZHANG Dan. Structural synthesis of decoupled spherical parallel mechanism based on driven-chain principle[J]. Transactions of the Chinese society for agricultural machinery, 2011, 42(11): 195-199.
[18]张彦斌, 吴鑫. 完全解耦二移动二转动并联机构结构综合[J]. 农业机械学报, 2013, 44(8): 250-255.
ZHANG Yanbin, WU Xin. Structural synthesis of fully-decoupled two-translational and two-rotational parallel mechanisms[J]. Transactions of the Chinese society for agricultural machinery, 2013, 44(8): 250-255.
[19]BALL R S. A Treatise on the Theory of Screws[M]. Cambridge: Cambridge University Press, 1900.
[20]CARRICATO M, PARENTI-CASTELLI V. Singularity-free fully-isotropic translational parallel mechanisms[J]. The international journal of robotics research, 2002, 21(2): 161-174.
[21]高峰, 杨加伦, 葛巧德. 并联机器人型综合的GF集理论[M]. 北京: 科学出版社, 2011.
GAO Feng, YANG Jialun, GE Qiaode. Type synthesis of parallel mechanisms based on GF set[M]. Beijing: Science Press, 2011.
Type synthesis of decoupled three-rotational and two-translational parallel robotic manipulators
CAO Yi1,2,3, CHEN Hai1,3, QIN Youlei1,3, CAO Haofeng1,3, ZHOU Hui1,3
(1. School of Mechanical Engineering, Jiangnan University, Wuxi 214122, China; 2. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China; 3. Jiangsu Key Laboratory of Advanced Food Manufacturing Equipment and Technology, Wuxi 214122, China)
In order to research the problem of coupling motion of parallel mechanisms, a method of type synthesis of decoupled three-rotational and two-translational (3R2T) parallel mechanisms was proposed based on the screw theory and the principle of one leg driving by an independent motor. Firstly, according to the prescribed motion characteristics of 3R2T decoupled parallel mechanisms, including the rotations around theX,Y, andZaxes, and the translations along theXandYaxes respectively, as well as the requirement that the direct Jacobian matrix of the decoupled parallel mechanism must be a diagonal matrix, a methodology was proposed that makes use of the screw theory to synthesize desired forms for both the direct and the inverse Jacobian matrices. Secondly, according to the features of both direct and inverse Jacobian matrices, the actuation screws of branched chain drive pairs actuated on the moving platform were confirmed. Then, the actuated screws representing the drive pairs on the corresponding chain as well as the mobile un-actuated screws of every limb were derived based on the reciprocal screw theory. Thereby, the screws with a branched chain structure were allocated. Finally, the moving platform and base platform connected by five branch chains were derived in turn according to the type theory of parallel mechanisms. This enabled the acquisition of the parallel mechanisms. The synthesized parallel mechanisms have decoupled characteristics, which prevent the problem of coupling motion, and this provides an application prospect to a certain extent.
type synthesis; parallel mechanisms; driven-chain; screw theory
2015-09-02.
日期:2016-08-29.
国家自然科学基金项目(50905075);机器人技术与系统国家重点实验室开放基金项目(SKLRS-2016-KF-06);机械系统与振动国家重点实验室开放课题(MSV201407);上海交通大学系统控制与信息处理教育部重点实验室开放基金(SCIP201506).
曹毅(1974-),男,教授.
曹毅,E-mail: caoyi@jiangnan.edu.cn.
10.11990/jheu.201509009
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20160829.1422.072.html
TH112
A
1006-7043(2016)10-1408-08
曹毅, 陈海, 秦友蕾,等. 解耦三转动两平移并联机器人机构型综合[J]. 哈尔滨工程大学学报, 2016, 37(10): 1408-1415.
CAO Yi, CHEN Hai, QIN Youlei, et al. Type synthesis of decoupled three-rotational and two-translational parallel robotic manipulators[J]. Journal of Harbin Engineering University, 2016, 37(10): 1408-1415.
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
中学生数理化·中考版(2021年10期)2021-11-22
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
北京航空航天大学学报(2017年10期)2017-04-20
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
北京航空航天大学学报(2014年1期)2014-12-19
航天返回与遥感(2014年4期)2014-07-31
中国机械工程(2012年15期)2012-07-25