
飞机全电刹车机电作动系统上电自检测
2016-11-18 02:19相里康马瑞卿
航空学报 2016年12期
相里康, 马瑞卿
西北工业大学 自动化学院, 西安 710072
飞机全电刹车机电作动系统上电自检测
相里康, 马瑞卿*
西北工业大学 自动化学院, 西安 710072
提出了一种飞机全电刹车机电作动(EMA)系统的上电自检测(POST)方法,以保证系统在运行前处于安全工作区域。通过检测,可及时准确地定位和更换故障部件,提高飞机出勤率。在系统运行之前,尽可能在有限的检测次数内全面准确地检测敏感元件,定位故障部件,避免造成刹车系统的二次伤害。针对逆变器和电机三相绕组组成的驱动回路,利用母线电容放电产生电流,完成检测。检测过程利用电容电压而非电源为逆变器供电,可防止过高的短路电流对电源的冲击,且电容上存储的能量有限,可有效避免短路故障对系统的二次伤害。检测方法在原有电路的基础上并未增加传感器和检测电路,但实现了逆变器功率管以及电机绕组,短路和开路故障的全面检测,且可定位出故障部件和故障原因。该机电作动系统上电自检测方法能够保证在一秒内完成系统全面自检测,经过1 000次正常及带故障试验,故障的误报率和漏报率保持在1‰以下。在现场试验中,系统可抵御飞机复杂的电磁环境(EME),工作性能稳定。通过软件设置不同故障阈值,可方便移植到其他机电作动系统中。
机电作动系统; 全电刹车; 无刷直流电机; 自检测; 逆变器; 定子绕组; 短路; 开路
刹车系统是飞机上相对独立的关键子系统之一,其作用在于吸收飞机着陆和滑跑阶段的动能,使飞机快速、安全地制动[1]。全电刹车是飞机机电作动系统[2]的一种,利用电机驱动装置代替原有的液压驱动,以实现刹车力的控制[3]。飞机的起飞和降落是飞机事故的多发阶段[4],全电刹车系统具有更好的安全性、可靠性、可维护性以及更优良的潜在刹车性能,是未来飞机刹车系统的发展方向[5-6]。然而,由于系统引入了更多电子元件,需要对元件进行全面、可靠的诊断来保证系统的安全性。
机电作动系统为刹车提供动力,是全电刹车系统的核心部件,保证其可靠运行,是保证全电刹车系统安全性的基础。其动力源选用无刷直流电机。无刷直流电机,因其结构简单、功率密度大、调速性能好等特点被广泛应用于航空航天、工业控制等领域[7-9]。其功率驱动电路一般采用电压型三相全桥逆变器。由于电力电子器件的脆弱性以及控制的复杂性,实现PWM控制策略的逆变器部分,是系统中的薄弱环节[10-11]。一旦逆变器发生短路故障,极易造成系统起火、爆炸等严重后果。逆变器与电机本体之间的连接电缆,由于反复插拔,容易造成电机三相的短路和开路故障,如不及时发现,容易造成电机缺相运行,使系统无法正常工作。
当逆变器发生故障,线路中电压和电流值相对正常电路不同,可利用这些特性进行故障检测,根据检测量的不同,分为基于电流量和基于电压量的诊断[12-21]。文献[13]针对上桥臂PWM调制、下桥臂常开调制方式下的逆变器开路故障检测方法,通过分时采集端电压来检测。文献[14]提出了一种无刷直流电机驱动器开路故障诊断方法,运用相电流信号以及电机的运行特性来检测,方法简单。上述两种检测方法,均需增加额外的电压或电流采集电路,增加了系统复杂性。文献[15]针对基于Buck DC-DC变换器调压的无刷直流电机三相全桥逆变器开路故障,采用单电流传感器对直流母线进行采样,与电机6种工作状态相结合检测故障,检测方法简单。但上述方法仅能诊断出逆变器开路故障,虽通过快速熔丝可将逆变器短路故障变为开路故障[14],但大的电流也会造成对电源的冲击。文献[16-21]采用小波变换、人工神经网络、全解耦齐次方程、相空间重构技术、基于模型的参数估计等方法检测电机驱动器故障,检测结果准确,但运算复杂,实用性差,难以在嵌入式系统中实现。上述方法均应用于逆变器的在线诊断,且无法同时诊断逆变器及电机三相绕组开路和短路故障。文献[22]提出了一种三相全桥逆变器静态故障检测方法,可在系统运行前,诊断出逆变器开路和短路故障,并定位出开路故障元件,但需要4个电阻分压电路和一个采样电阻,且无法定位出短路故障元件。
本文研究了全电刹车机电作动系统的上电自检测方法,以保证其在运行前处于安全工作区域 (Safe Operation Area, SOA),并针对由无刷直流电机定子绕组以及逆变器组成的功率传输通道,分析了故障检测过程,检测原理以及故障定位方法。该方法可全面检测开关管及定子绕组短路和开路故障,并定位出故障元件。检测方法仅依靠一个系统固有的直流母线电流传感器,其运算简单,且对噪声和参数的敏感度低。由于在检测过程中采用电容而非电源为逆变器供电,其存储的能量有限,可避免系统的二次伤害,且不会对电源产生冲击。该上电自检测方法可在空中断电再恢复时重新检测系统,以保证着陆安全。
1 全电刹车系统组成
全电刹车系统包括刹车控制单元(Brake Control Unit, BCU),机电作动控制器 (Electro-Mechanical Actuation Controller, EMAC)以及机电作动器 (Electro-Mechanical Actuation, EMA),其中EMAC与EMA共同组成机电作动系统。图1为全电刹车机电作动系统单通道原理框图,其中EMAC主要由控制电路、电流传感器、电压传感器、信号处理电路、驱动电路、全桥逆变器以及由S7和Rb构成的泄放回路等组成,其中全桥逆变器以及电机绕组共同组成驱动回路。EMA主要由无刷直流电机本体、霍尔位置传感器、力传感器、传动机构以及刹车盘组成。由于功率电的电压高,短路时极易造成系统着火,甚至爆炸,EMAC中开关管S0用于当刹车单元发生故障时立即切断功率电,以保护飞机电源,防止短路电流对供电电源的冲击,以及由此带来的其他飞机单元故障。电流传感器主要用于检测电路是否发生过流故障,电压传感器用于检测电路是否发生过压或欠压故障,泄放回路用于当系统工作结束后,释放掉电容上存储的能量。
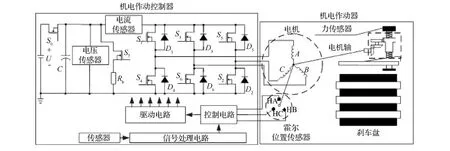
图1 全电刹车机电作动(EMA)系统单通道原理框图Fig.1 Diagram of single channel electro-mechanical actuation (EMA) system for electric braking
2 系统上电自检测流程
系统上电自检测旨在利用现有电路在不增加元件的基础上完成。对于元件的检测,需根据特定的检测顺序执行,保证当系统存在多处故障时,在最短的检测时间内尽量多地检测出故障元件,降低维修时间,保证飞机出勤率,且不会因为检测过程,造成系统的二次伤害。具体检测流程图如图2所示。传感器故障之间互相独立,根据传感器初始值,判断其是否正常,若任一发生故障,则将其相应的故障标志位置1。由于驱动回路检测需要依靠电流传感器检测值,若其发生故障,则无法进行驱动回路故障的检测,应立即结束检测。具体驱动回路检测方法将在第3节中阐述。电压传感器是电源电压故障检测的基础,而电源正常是保证电机正常运行的必要条件,故必须保证电源正常,才可进行其他电路的检测。

图2 系统上电自检测流程图Fig.2 Flow chart of power-on self-test
霍尔位置传感器是无刷电机正常运行的保证,所以对其的检测,应在运行电机对传动机构检测之前进行,且检测过程应保证电机在转动极小的距离内完成,防止对传动机构参考零点位置产生影响。检测过程如下:首先将霍尔传感器可能出现的状态,按照“HC-HB-HA”编码,将“000”~“111”分别编码为“0~7”。然后采用试运行的方式,将电机分别正反转两圈,记录出现过的霍尔状态,若出现0或7两种状态,则说明出现了霍尔故障。最后根据未出现的霍尔状态,可定位出霍尔故障元件及故障原因。例如A相霍尔信号出现开路故障,则不可能出现“001”,“011”和“101”三种情况,也即不会出现1,3,5三种霍尔状态,根据这一特性可定位出故障传感器。故障霍尔传感器及其故障定位的判定如表1所示。
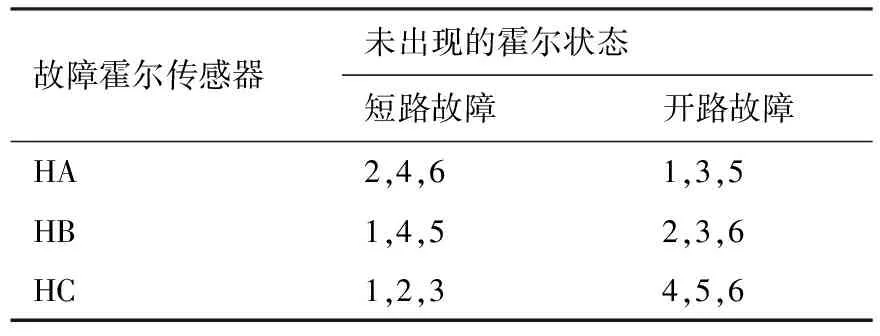
表1 霍尔传感器故障元件定位判定表Table 1 Fault location of HALL sensor
在保证力传感器正常的情况下,进行传动机构故障的检测。电机驱动EMA中刹车压头压向刹车盘,当压到固定的刹车压力后,压头回退固定的距离,完成刹车压头调隙,保证刹车压头与刹车盘之间在开始运行时保持固定的缝隙,以防止机轮抱死。若在该过程中出现比较大的压力值,则说明传动机构中存在卡滞。
当系统完成自检测,或发生相应故障时,关闭所有功率管,停止逆变器供电,将故障信息上传,完成整个自检过程。
3 驱动回路故障诊断原理
3.1 诊断流程
无刷直流电机采用传统的电压型三相全桥逆变器,如图1所示。在上电自检时,为了使功率管有规律的开关,提出采用虚拟霍尔信号代替实际的霍尔传感器信号,其逆变器开通逻辑及相应的电机三相电流流向如表2所示。
作为全电刹车机电作动系统上电自检测的一部分,驱动回路故障检测过程,可分为4步。前3步为检测开关状态时电路是否发生了短路和开路故障,通过虚拟霍尔信号来改变开关状态,最后一步通过分析6个开关状态下的故障情况,定位故障元件,其具体检测流程图如图3所示。

表2 逆变器开关状态编码Table 2 Switch state coding of inverter

图3 单个开关状态检测流程图Fig.3 Program flow chart for one switch state
第1步:S0开通,使能量存储至电容C中,设置S0的开通参考时间tref1,可控制电容电压。
第2步:S0关断,S1~S6按照表1所示任意一种开关状态开通,能量从电容C中释放,流过驱动回路,产生电流。通过设置开关状态参考时间tref2,可控制其峰值电流。若任意一种开关状态中母线电流高于短路阈值ISC或低于开路阈值IOC则认为此开关状态下,电路中发生了短路或开路故障。由于短路故障容易造成系统的二次伤害,一旦检测出短路故障,立即关闭开关管。
第3步:设置泄放时间tref3,通过泄放回路,使电容电压降为0,以防止影响下一个开关状态。循环前3步,完成6个开关状态的检测。
第4步:解耦短路和开路故障状态,定位出故障元件。根据发生故障的开关状态,通过表3和表4判定故障元件。

表3 开路故障元件定位判定表Table 3 Fault location of open-circuit faults
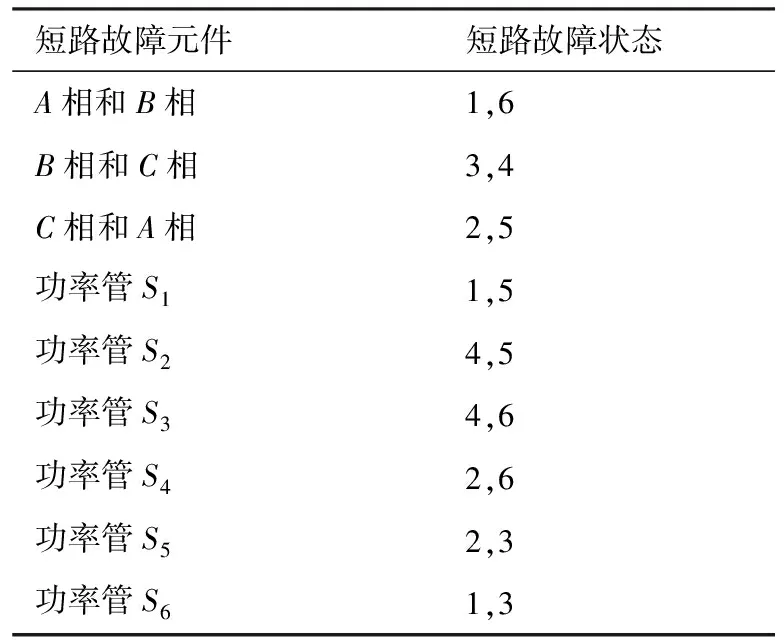
表4 短路故障元件定位判定表Table 4 Fault location of short-circuit faults
3.2 检测过程建模与分析
由于电容上存储的能量较小,在检测过程中电机转速近似为零,从而假设其反电动势为零,不考虑功率管的开通电阻,设Rp为电机的相电阻,Lp为电机的相电感,若电路不存在故障,驱动回路电容充放电的简化电路如图4所示(ESR为等效串联电阻)。第1步可等效于图4中开关S连接至节点1,电容电压
(1)
充电完成后电容电压为
(2)
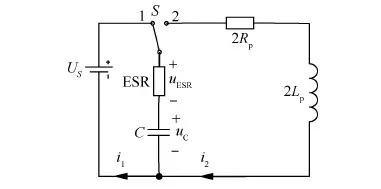
图4 驱动回路电容充放电简化电路Fig.4 Simplified circuit of charging and discharging progress of capacitor in the drive-loop
第2步可等效为图4中开关S连接结点2。驱动回路总的电阻为Rsum,总的电感为Lsum:
Rsum=ESR+2Rp
(3)
Lsum=2Lp
(4)
设电路中所有电阻上的电压为uR,电感电压为uL,电容电压为uC,根据基尔霍夫定理,可得
-uC+uR+uL=0
(5)


(6)
其特征方程为LsumCp2+RsumCp+1=0,特征根为
(7)
(8)

(9)
(10)
可见,uC(t)随时间衰减,电流i2(t)先增加后减小,当电流变化率为零的时刻tm,电流达到最大值im,其中tm为

(11)
uC(t)=UC0e-δt(1+δt)
(12)
(13)
tm=1/δ
(14)

(15)

(16)
tm=β/ω
(17)
不同阻尼状态下的电容电压和传感器电流波形如图5所示,根据开关状态参考时间tref2可计算出正常工作时,电流的最大值为Imax(normal)。
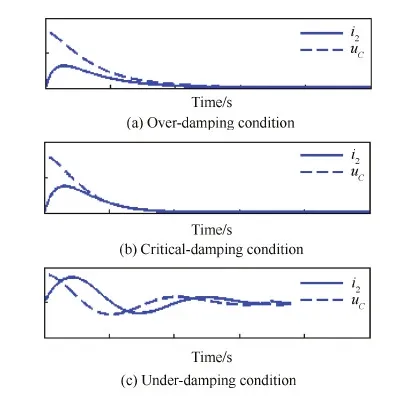
图5 不同阻尼状态下的电容电压和传感器电流波形Fig.5 Waveforms of voltage of capacitor and current of sensor in different damping conditions
第3步时,电路可等效为零输入响应的一阶电路,为了保证充分放电,认为第2步中电容电压未减小,可得放电后电容电压UC3为
(18)
3.3 故障模态分析
当开关管S1~S6中任意一个发生短路(Short Circuit, SC)故障时,例如当S1发生短路故障时,开关状态2时短路故障不会影响电流,如图6(a)所示。开关状态3时,如图6(b)所示,电机三相均导通,且两相处于并联状态。电路中总的电阻和电感发生变化,其具体数值为
Rsum=ESR+3/2Rp
(19)
Lsum=3/2Lp
(20)

图6 S1短路(SC)开关状态2,3和1时等效电路Fig.6 Equivalent circuit of switch state 2,3, and 1 with short circuit (SC) at S1

图7 A相和B相相间短路开关状态1和3时等效电路 Fig.7 Equivalent circuit of switch state 1 and 3 with SC between phases A and B
开关状态1时,如图6(c)所示,上下桥臂直通。导通瞬间,电流极大。一旦系统检测出短路故障,立即关断S4。由于短路持续时间很短,假设电容电压不变,则可得短路电流Ishort为

(21)
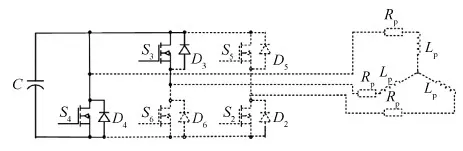
图8 S1开路(OC)开关状态2时等效电路Fig.8 Equivalent circuit of switch state 2 with open circuit (OC) at S1
当电机相间发生短路故障,例如A相和B相,开关状态1时,其等效电路如图7(a)所示,桥臂直通,产生短路电流,其电流值同式(21)。其他开关状态,如状态3时,其等效电路如图7(b)所示,电机两相并联后与另外一相串联,其电路中总的电阻和电感同式(19)和式(20)。根据阻尼状态,可得到电机三相开通状态下电流的最大值Imax(SC)。相较于正常状态,电路中总的电阻和电感减小,所以电流的最大值将有所增大。
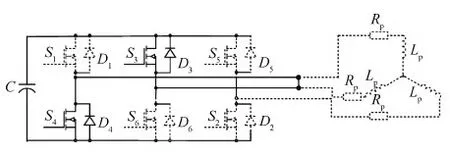
图9 A相开路开关状态2时等效电路Fig.9 Equivalent circuit of switch state 2 with OC at phase A
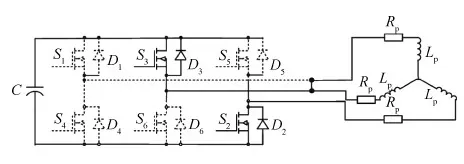
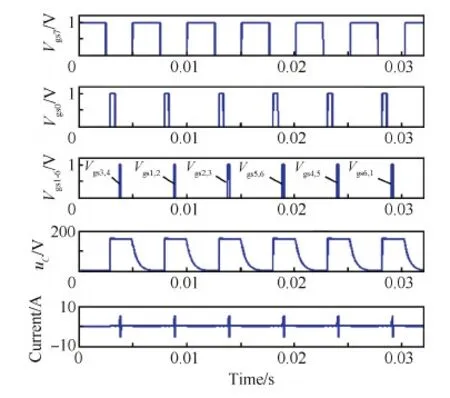
图10 正常状态下的仿真波形图Fig.10 Simulation waveforms under normal condition
当所有开关状态下,母线电流均为0,则说明开关管S0发生了开路(Open Circuit, OC)故障。当S1~S6中任意一个发生开路故障,如S1开路,开关状态2时,等效电路如图8所示,其母线电流为0,而其他情况不受影响。当电机相绕组发生开路故障,如A相发生开路时,开关状态2时的等效电路如图9所示,母线电流也为0。
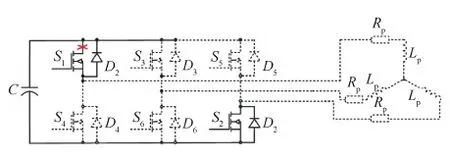
图11 无故障状态电流Fig.11 Current without fault

图12 单个开关状态电流 Fig.12 Current for one switch state
电流传感器可检测出4种直流母线电流最大值:即正常导通时的Imax(normal),三相同时导通时的Imax(SC),短路电流Ishort和零电流。而Imax(SC)略大于Imax(normal),为了消除对电流传感器精度的依赖,可将其作为正常情况计算,故设置短路故障阈值电流ISC和开路故障阈值电流IOC分别为
Imax(SC) (22) Inoise (23) 为保证检测过程的抗干扰能力,IOC应大于电流传感器检测信号的干扰量Inoise。 为了验证驱动回路上电自检测方法的可行性,采用电力电子仿真软件Psim对检测电路及方法进行仿真,其中机电作动系统参数采用实际系统参数,具体为电源电压160 V,电机为3对极,反电动势系数0.126 V·rad·s-1,定子相电阻10 Ω,相电感1 mH,母线电容400 μH,其ESR为0.5 Ω,泄放电阻为1 Ω,传动比为1∶4,导程为 5 mm,电机力矩与刹车力矩转换系数为2.63×10-5。 电路正常和三相导通时均为过阻尼。设置电容充电时间tref1=400 μs,根据式(2)电容电压接近电源电压。为了保护逆变器,开关状态中开关管开通时间设置为tref2=120 μs,并未设置到电流最高点,根据式(10)可得电路正常时最高电流为Imax(normal)=5.5 A,三相导通时的最高电流为Imax(SC)=7.4 A,根据式(21)可得短路电流Ishort=320 A,根据式(22)和式(23),设置短路阈值电流ISC=20 A,开路阈值电流IOC=1 A。设置泄放时间tref3=2.5 ms,根据式(18)放电结束电容电压接近零。设置开关状态间时间间隔为5 ms,整个检测过程历时30 ms。 图10为正常状态下仿真波形图。首先S7开通,启动泄放回路,防止电容上存储有电能,影响检测结果,然后S0开通,通过电源给电容充电,电容电压上升,待电容电压后,根据开关状态,开启S1~S6,产生电流,通过检测电流幅值,判断开关状态下是否发生短路或开路故障。由于开关状态下,S1~S6开通时间极短,电容电压几乎没有下降。最后再开通S7,泄放掉电容电压,重新开始下一个开关状态的检测。 图13 S1开路时电流Fig.13 Current with OC at S1 图11为无故障状态下的电流值,其中反向电流是由于二极管的续流产生的,图中标号对应表2 中的开关状态。图12为单个开关状态下母线电流的波形图,其电流峰值为5.5 A,与理论分析吻合。图13和图14分别为开关管S1和电机A相开路故障时的直流母线电流波形图,仿真结果与表3中的分析结果吻合。图15和图16分别为开关管S1短路故障和电机A相和B相相间短路故障时的母线电流波形图,仿真结果与表4中的分析结果吻合。当S1短路,在开关状态3、4时,电机三相均导通,其电流值略大于无故障状态2和6时的电流值,与理论分析吻合。由于设置了短路保护,电流最大值为短路保护阈值20 A。 图14 A相开路时电流Fig.14 Current with OC at phase A 图15 S1短路时电流Fig.15 Current with SC at S1 图16 A相和B相短路时电流Fig.16 Current with SC between phases A and B 图17 现场调试图Fig.17 Sketch of the field debugging 图18 单个开关状态电流Fig.18 Current waveform for one switch state 图19 正常时电流波形Fig.19 Current waveform for the normal condition 图20 A相开路时电流波形Fig.20 Current waveform with OC of phase A 本文所述方法成功应用于某型全电刹车系统中,该机电作动系统包含两个EMAC,左右两个EMAC分别控制左右机轮上的EMA工作,其现场调试图如图17所示。 图18所示为单个开关状态系统正常工作时母线电流的检测波形。对比图12,其电流幅值略小且反向电流振荡,其原因在于电机的反电动势以及电路的寄生参数,但并不影响电路故障检测。图19所示为系统无故障时6个开关状态下的母线电流波形,与图11中的仿真结果相吻合。设置EMA2中电机A相开路故障,图20为其直流母线电流的检测结果,图中有电流波形的开关状态为状态3和状态4,与图14中的仿真结果吻合。 该全电刹车机电作动系统在实验室中进行了1 000次无故障和带故障试验,系统的误报率和漏报率保持在1‰以下。在现场试验中,系统可抵御飞机复杂的电磁环境,工作性能稳定。 提出了一种飞机全电刹车机电作动系统上电自检测方法,在不增加任何额外传感器或检测电路的基础下,完成包括力传感器,电流传感器,电压传感器,霍尔位置传感器以及由逆变器,电机三相组成的驱动回路,传动机构等的故障检测,保证了飞机的出勤率,且检测过程不会造成系统的二次损害,保证了飞机的安全性。 针对驱动回路的故障诊断,提出了一种新的检测方法,该方法利用母线电容充放电过程来完成检测,检测过程安全、可靠。该方法能全面诊断出逆变器和电机绕组短路及开路故障,并定位出故障元件。该方法对母线电流传感器的精度要求低,易实现,可作为子程序嵌入在现有的电机驱动软件中,无需大量计算。对比目前现有的逆变器故障检测方法,本文提出的方法检测故障全面,计算量小。通过仿真和试验,验证了方法的可行性和可靠性。该方法也可推广至其他机电作动系统的上电自检测中。 [1] 薛晶, 李玉忍, 田广来, 等. 飞机刹车副温度场的瞬态有限元模型[J]. 航空学报, 2010, 31(3): 638-642. XUE J, LI Y R, TIAN G L, et al. Transient temperature finite element model of airplane disk brakes[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(3): 638-642 (in Chinese). [2] 郭宏, 邢伟. 机电作动系统发展[J]. 航空学报, 2007, 28(3): 620-627. GUO H, XING W. Development of electromechanical actuators[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(3): 620-627 (in Chinese). [3] 李洪果, 王锴, 吴瑞祥, 等. 飞机全电刹车系统研究[J]. 北京航空航天大学学报, 2004, 30(4): 339-343. LI H G, WANG K, WU R X, et al. Demonstration of an plane electrically actuated brake[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 30(4): 339-343 (in Chinese). [4] 张明, 聂宏. 飞机地面转弯和刹车响应动力学分析[J]. 航空学报, 2008, 29(3): 616-621. ZHANG M, NIE H. Dynamics analysis of aircraft groud steering and braking responses[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(3): 616-621 (in Chinese). [5] COLLINS A. EABSYS: Electrically actuated braking system[C]//IEE Colloquium on Electrical Machines and Systems for the More Electric Aircraft, 1999: 411-415. [6] BENNOUNA O, MORCOS N. Modeling and simulation of electromechanical actuators for aircraft nacelles[C]//Proceedings of the 9th International Symposium on Mechatronics and its Applications(ISMA13), 2013: 1-5. [7] 夏长亮, 方红伟. 永磁无刷直流电机及其控制[J]. 电工技术学报, 2012, 27(3): 25-34. XIA C L, FANG H W. Permanent-magnet brushless DC motor and its control[J]. Transactions of China Electrotechnical Society, 2012, 27(3): 25-34 (in Chinese). [8] BIST V, SINGH B. A unity power factor bridgeless isolated Cuk converter-fed brushless DC motor Drive[J]. IEEE Transactions on Industrial Electronics, 2015, 62(7): 4118-4129. [9] BERTOLUZZO M, BUJA G, KESHRI R K, et al. Sinusoidal versus square-wave current supply of PM brushless DC drives: A convenience analysis[J]. IEEE Transactions on Industrial Electronics, 2015, 62(12): 7339-7349. [10] WIKSTROM P, TERENS L A, KOBI H. Reliability, availability, and maintainability of high-power variable-speed drive systems[J]. IEEE Transactions on Industry Applications, 2000, 36(1): 231-241. [11] FUCHS F W. Some diagnosis methods for voltage source inverters in variable speed drives with induction machines-a survey[C]//IEEE IECON. Piscataway, NJ: IEEE Press, 2003: 1378-1385. [12] 安群涛, 孙力, 孙立志, 等. 三相逆变器开关管故障诊断方法研究进展[J]. 电工技术学报, 2011, 26(4): 135-145. AN Q T, SUN L, SUN L Z, et al. Recent developments of fault diagnosis methods for switches in three-phase inverters[J]. Transactions of China Electrotechnical Society, 2011, 26(4): 135-145 (in Chinese). [13] 王强, 王佑仁, 张子富, 等. 无刷直流电机驱动系统逆变器的开路故障诊断[J]. 中国电机工程学报, 2013, 33(24): 114-120. WANG Q, WANG Y R, ZHANG Z F, et al. A diagnosis method for inverter open-circuit faults of brushless DC motor driver systems[J]. Proceedings of the CSEE, 2013, 33(24): 114-120 (in Chinese). [14] PARK B G, LEE K J, KIM R Y, et al. Simple fault diagnosis based on operating characteristic of brushless direct-current motor drives[J]. IEEE Transactions on Industrial Electronics, 2011, 58(5): 1586-1593. [15] 李文琢, 房建成, 李海涛. 基于Buck变换器调压的无刷直流电机功率变换器单管开路故障诊断[J]. 中国电机工程学报, 2013, 33(15): 124-132. LI W Z, FANG J C, LI H T. Single switch open-circuit fault diagnosis in brushless DC motor drivers with buck converters[J]. Proceedings of the CSEE, 2013, 33(15): 124-132 (in Chinese). [16] AWADALLAH M A, MORCOS M M. Automatic diagnosis and location of open-switch fault in brushless dc motor drives using wavelets and neuro-fuzzy systems[J]. IEEE Transactions on Energy Conversion, 2006, 21(1): 104-111. [17] KHAN M A S K, RAHMAN M A. Development and implementation of a novel fault diagnostic and protection technique for IPM motor drives[J]. IEEE Transactions on Industrial Electronics, 2009, 56(1): 85-92. [18] AWADALLAH M A, MORCOS M M. Switch fault diagnosis of PM brushless dc motor drive using adaptive fuzzy techniques[J]. IEEE Transactions on Energy Conversion, 2004, 19(1): 226-227. [19] CHAN C W, SONG H, ZHANG H Y. Application of fully decoupled parity equation in fault detection and identification of DC motors[J]. IEEE Transactions on Industrial Electronics, 2006, 53(4): 1277-1284. [20] 孙丹, 孟濬, 管宇凡, 等. 基于相空间重构和模糊聚类的永磁同步电机直接转矩控制系统逆变器故障诊断[J]. 中国电机工程学报, 2007, 27(16): 49-53. SUN D, MENG J, GUAN Y F, et al. Inverter faults diagnosis in PMSM DTC drive using reconstructive phase space and fuzzy clustering[J]. Proceedings of the CSEE, 2007, 27(16): 49-53 (in Chinese). [21] MOSELER O, ISERMANN R. Application of model-based fault detection to brushless DC motor[J]. IEEE Transactions on Industrial Electronics, 2000, 47(5): 1015-1020. [22] ZHANG Q, MA R, HUANGFU Y, et al. A novel static fault diagnosis approach for three-phase full-bridge inverter[C]//Conference of IEEE Industrial Electronics Society. Piscataway, NJ: IEEE Press, 2015: 2360-2366. Power-onself-testofelectro-mechanicalactuationsystemforaircraftelectricbraking XIANGLIKang,MARuiqing* SchoolofAutomation,NorthwesternPolytechnicalUniversity,Xi’an710072,China Inthispaper,apower-onself-test(POST)schemefortheelectro-mechanicalactuation(EMA)systemforaircraftelectricbrakingisproposedtoensurethatthemotordrivesystemisinhealthycondition.Withself-test,faultcomponentscanbefound,locatedandexchangedaccuratelyandtimelytoensuretheflightrateofaircraft.Withtheproposedscheme,vulnerablecomponentscanbetestedandfaultypartscanbelocatedwithminimumtimes,thenthesecondarydamagecanthenbeavoided.Forthedrive-loopconsistedofinverterandmotorthree-phasewindings,apower-onself-testschemeisputforwardandanalyzed.Inthetestingprocess,thedc-linkcapacitor,controlledbyaMOSFET,ischargedtostoreenergyanddischargedtogeneratecurrentfortest.Meanwhile,thefaultsareidentifiedbydetectingthemaximumvalueofthecurrent.Withtheproposedscheme,BLDCmotorcanrunsafelybycomprehensivelydiagnosingopen-circuitfaultsandshort-circuitfaultsofinverterandthree-phasewindingsinadvance.Comparedwiththetraditionalschemes,nomoresensorsordetectioncircuitsisadded.ThePOSTschemeforEMAsystemcanrealizecomprehensiveself-testwithinonesecond.Falsealarmrateandomissionrateremainlessthan1%intheexperimentwithandwithoutfaults.Theschemecanalsoresistthecomplicatedelectromagneticenvironment(EME)oftheaircraft,anditsperformanceisstableandreliable.Withdifferentfaultthresholds,itcanbemigratedtootherEMAsystemhandily. electro-mechanicalactuationsystem;electricbraking;brushlessDCmotors;self-test;inverter;statorwinding;shortcircuit;opencircuit 2016-05-06;Revised2016-06-15;Accepted2016-07-18;Publishedonline2016-07-221149 2016-05-06;退修日期2016-06-15;录用日期2016-07-18; < class="emphasis_bold">网络出版时间 时间:2016-07-221149 www.cnki.net/kcms/detail/11.1929.V.20160722.1149.006.html * .Tel.:029-88431399E-mailmarq@nwpu.edu.cn 相里康, 马瑞卿. 飞机全电刹车机电作动系统上电自检测J. 航空学报,2016,37(12):3832-3842.XIANGLK,MARQ.Power-onself-testofelectro-mechanicalactuationsystemforaircraftelectricbrakingJ.ActaAeronauticaetAstronauticaSinica,2016,37(12):3832-3842. http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn 10.7527/S1000-6893.2016.0216 V240.2 A 1000-6893(2016)12-3832-11 相里康男, 博士研究生。主要研究方向: 全电刹车系统控制技术, 无刷电机驱动技术。E-mail: xiangli@mail.nwpu.edu.cn 马瑞卿男, 博士, 教授, 博士生导师。主要研究方向: 永磁电机驱动控制技术, 电力电子技术。Tel.: 029-88431399E-mail: marq@nwpu.edu.cn URL:www.cnki.net/kcms/detail/11.1929.V.20160722.1149.006.html *Correspondingauthor.Tel.:029-88431399E-mailmarq@nwpu.edu.cn4 仿真和实验







5 结 论
猜你喜欢
防爆电机(2021年3期)2021-07-21建材发展导向(2021年7期)2021-07-16青年歌声(2019年2期)2019-02-21电子制作(2018年19期)2018-11-14电子制作(2018年19期)2018-11-14电子制作(2017年7期)2017-06-05电子制作(2017年23期)2017-02-02科普童话·百科探秘(2015年6期)2015-10-13伴侣(2015年5期)2015-09-10大众科学(2015年10期)2015-09-10
