
基于BOTDA的堤坝健康监控的研究
2016-11-17 10:38俞志勇王燕杰周泽正王先进
计算机测量与控制 2016年6期
俞志勇,李 青,王燕杰,周泽正,王先进
(中国计量学院 机电工程学院,杭州 310018)
基于BOTDA的堤坝健康监控的研究
俞志勇,李 青,王燕杰,周泽正,王先进
(中国计量学院 机电工程学院,杭州 310018)
针对堤坝坍塌,为避免伤亡和经济损失,需要对堤坝进行健康监控,及时提供预警;通过BOTDA(Brillouinopticaltimedomainanalysis)技术,设计并搭建堤坝实验平台,研究用分布式光纤传感器检测不同水流量下堤坝的形变;堤坝实验平台由恒流量装置和堤坝两部分组成,恒流量装置能精准的为堤坝提供所需的水流量,不同的水流量会给堤坝施加不同的压力,堤坝将在不同的水流量下产生相应的变形;将分布式光纤传感器埋入堤坝中,当堤坝发生形变,光纤会随着堤坝的变形而被拉伸,运用BOTDA技术对分布式光纤传感器进行测量分析,可得光纤的布里渊频移得数据,相应地反映了堤坝的变形;研究表明,光纤的布里渊频移能正确反映出堤坝形变,BOTDA技术应用于堤坝健康监控具有良好的监控预警效果。
堤坝;健康监控;分布式测量;光纤传感器;形变
0 引言
堤坝是堤和坝的总称,也泛指防水拦水的建筑物和构筑物[1]。堤坝最主要的作用是为了防洪。华北平原上著名的地上河,河床平均高出两岸地面4米以上,两岸地区每逢汛期便面临着洪水的威胁,堤坝一旦溃决, 灾害必将非常严重。例如,1998年中国发生特大洪灾,包括长江、嫩江、松花江等,造成多处决堤,导致3.18亿亩庄稼地受灾,受灾人口达2.23亿人,造成3004人死亡,倒塌房屋685万间,直接经济损失达1666亿元[2]。为了避免决堤对人们的危害,除了研究决堤的机理,探寻堤坝的材料,改进堤坝的结构外,对堤坝进行健康监控,及时提供预警,具有很强的现实意义。分布式光纤传感器采用光纤作为传感介质,不但可以测量沿光纤轴向连续空间的信息分布,而且还可以对信息变化进行定位,具有抗干扰性强、监测距离长、空间分辨高等特点,特别是他分布式测量的特点非常适合监控堤坝。
因此,搭建堤坝实验平台,研究用分布式光纤传感器检测不同水流量下堤坝的形变具有非常重要的意义。
1 BOTDA技术简介
BOTDA技术是指布里渊光时域分析技术,该技术的实现基于光纤光学和激光原理。将一束很窄的探测脉冲光通过双向耦合器注入光纤中,脉冲光在向前传输时会不断产生背向散射光,背向散射光通过该双向耦合器耦合到光电检测器中。设从光纤发射端面发出脉冲光,到接受到该脉冲光在光纤中L处产生的闪射光所需的时间t,则在t时间内,光波从发射端至L处往返传播一次。发射端到L处的距离为:
(1)
式中,v是光在光线中的传播速度,t为从发射脉冲光到接受到某位置产生的瑞利散射光所需的时间。
布里渊散射是入射光场与介质的声学声子相互作用而产生的一种非弹性光散射现象[3]。由于自发热运动,组成介质的粒子会形成连续的弹性力学振动。这种振动会导致介质密度随时间和空间周期性变化,从而在介质内部产生一个自发的声波场,导致介质的折射率被周期性调制并以声速Va在介质中传播,形成声场光栅。当光波射入到介质中时受到声场光栅作用而发生散射,散射光就会因多普勒效应而产生与声速相关的频率漂移[4]。布里渊频移为:
(2)
式中,n为光纤折射率,Va为光纤介质中的声速,λo为入射光波长。布里渊频移与光纤的折射率以及光纤的声波速度成正比,与入射光的波长成反比。声波速度和光纤折射率都与都是温度与应力的函数。稍大的应变会导致光纤折断,因为光纤只能实现微小应变。经推导可得,布里渊频率变化量vB随光纤温度和应变的变化量近似成线性关系,可表示为:
(3)
式中,Cv,T为布里渊频移变化量的温度系数,Cv,ε为布里渊频移变化量的应变系数。
BOTDA技术仅需从光纤的一端入射脉冲光,并在光纤同一端通过探测脉冲光的自发布里渊散射光谱进行传感[5]。这种传感方式虽然在实际应用中非常容易实现,但是由于自发布里渊散射信号非常微弱,探测的距离受到了限制。
基于受激布里渊散射效应的BOTDA技术,检测信号强度较大,相比BOTDR等其他的检测方法,传感器的测量精度和传感距离可以得到很好的提高[6]。
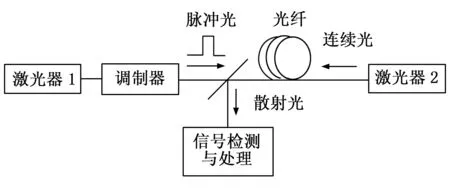
图1 BOTDA结构示意图
图1是BOTDA传感系统的基本结构。激光器1发出的连续光经调制器调制后作为泵浦脉冲光,泵浦脉冲光从光纤的一端进入光纤。激光器2发出连续探测光,连续探测光的频率比泵浦脉冲光的频率低约一个布里渊频移,被称为斯托克斯光。当泵浦脉冲光与斯托克斯光在光纤中相遇时,由于受激布里渊放大作用,泵浦脉冲光的一本分能量通过声波场转移给斯托克斯光。通过在信号检测端测量斯托克斯光功率的变化并利用BOTDA技术便可以得到光纤沿线能量转移的大小[7]。由于能量转移的大小和两个光波之间的频率差有关,且当两者的频率差等于光纤的布里渊频移时转移的能量最大,所以通过扫描两个光源之间的频率差并记录下每个频率差下光纤沿线能量转移的大小,便可得到光纤沿线的布里渊增益谱[8]。对布里渊增益谱进行洛伦兹拟合得到光纤沿线的布里渊频移分布,从而实现对光纤应变和温度的全分布式传感。
受激布里渊闪射效应源自强感应声波场对入射光的作用,当如何光波达到一定功率,入射光通过电致伸缩产生声波,引起介质折射率的周期性调制,而且大大加强了满足相位匹配的声场,致使入射光波的大部分能量耦合到反向传输的布里渊散射光,从而形成受激布里渊散射。从场的经典理论出发,受激布里渊散射过程可以经典地描述为入射光波、斯托克斯波通过声波进行的非弹性相互作用。
2 恒流量装置的设计与搭建
任何一种调节方式,都需要反应时间,具有滞后性。当调节阀大小恒定时,水位越高,流量越大。液位的高低波动会影响水流量。如果控制水面高度恒定,就可以减小流量的波动,较少流量阀的调节,使水流量更稳定。如图2所示,恒流量装置有水位控制和流量控制这两部分组成。水位控制部分包括水位传感器,变频器和交流水泵。流量控制部分包括流量传感器,调节阀和步进电机。
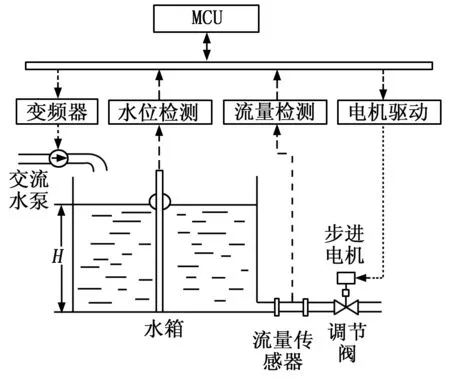
图2 恒流量装置结构
2.1 PID控制原理
在连续时间控制系统中,PID控制器应用的非常广泛,技术成熟。长期以来形成了典型的结构,参数整定方便,结构更改灵活,能满足一般的控制要求。数字PID控制比连续PID控制更为优越,因为计算机程序的灵活性,很容易克服连续PID存在的问题,经修正而得到更完善的数字PID算法。数字PID控制算法可分为位置式PID控制算法、增量式PID控制算法和速度式PID算法。由于计算量少,抗干扰强,计算机故障对设备的影响小。因此,在3种控制算法中,增量式PID控制算法最为常用。
数字PID控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量,因此公式(1)的积分和微分项不能直接使用,需要进行离散化处理。当采样周期T足够短时,以一系列的采集时刻点kT代表连续时间t,以和式代替积分,以增量代替微分。k是采样序号,u(k)为第k次采样时刻数字控制器或计算机的输出值,e(k)是第k次采样时刻输入的偏差。
增量式PID控制规律:

(2)
式中,A=kp(1+T/Ti+Td/T),B=Kp(1+2Td/T),C=KpTd/T,kp为比例系数,Ti为积分时间常数,Td为微分时间常数。
增量式PID控制算法是对偏差增量进行处理, 然后输出控制量的增量, 即执行机构位置的增量。增量式PID数字控制器不会出现饱和, 而且当计算机出现故障时能保持前一个采样时刻的输出值, 保持系统稳定, 因此在此系统中增量式算法被采用作为编程算法来使用。PID参数选取的好坏,将会影响装置的精度和稳定性。
PID控制系统,加大kp将会加快系统的响应速度,并且在有稳态误差的系统中能在一定程度上减小系统的稳态误差。但kp增大系统的超调,并容易使系统产生震荡,降低系统的稳定性。减小Ti有利于系统快速消除稳态误差,但Ti太小,会大大增加系统的超调,破坏系统的稳定性。加大Td,使系统超调减小,稳定性增强,但Td太大,会使系统对干扰信号过于敏感。
PID最大的优点是可以在不知道被控对象参数的情况下,用试凑法PID的值,可以使系统得到较好的控制。试凑法凭经验整定参数的方法。让系统闭环,运行系统,一边依kp-Ti-Td顺序调节,一边观察需要控制的量,直到满意为止。
试凑法整定参数分为3步:1)调整kp,让系统闭环,令Ti=无穷,Td=0,取消微分和积分作用。让kp由小到大变化,观察需要控制的量是否满足要求。如果满足要求,则Ti,Td不需要再调整;2)调整Ti,如果静差太大,加入Ti,因为加入积分会使系统稳定性下降,所以,此时需要稍微减小kp,让Ti由大到小变化,观察需要控制的量是否满足要求。如果满足要求,则Td不需要再调整;3)调整Td,如果系统动态不好,加入Td。
2.2 水位检测部分结构
测水位的高低,可以根据水位的压力的到水位的高低,比如投入式水位传感器,也可以根据液面到测量点的距离来确定水位的高低,比如超声波液位仪或拉绳传感器。投入式水位传感器是一种测量水位的压力传感器,具有直接投入、安装方便、结构简单和经济耐用等优点,但传感器的水位误差有2 cm,精度没法满足实验要求。超声波液位仪测量测量误差是其量程0.3%,测量低水位的精度比投入式水位传感器高。拉线传感器可以测距离,只要在水面放置一个漂浮物,再将拉绳传感器的拉绳头系到漂浮物上。随着水位的上升或下降,漂浮物也随着水面上升和下降,因此,拉绳传感器就可以测出液面的高低。但随着拉线传感器拉绳被拉长度的增加,拉线传感器的回复力也随着增加,因此,拉绳传感器根据这种方法,不能正确撤出液面的高度。
因此,需要设计一种简单而又精度高的水位传感器。如图3所示,从内往外看,水位传感器由空心杆、砝码、绳索、滑轮、滑线变阻器和浮球组成。砝码和悬浮球都有一定的重量,绳索两端分别系在砝码和悬浮球两端,将绳索拉直,保证悬浮球不会绕着铁杆旋转。悬浮球的重量比砝码稍微重一点,在水中,悬浮球下方部分浸入水中,受到收水的浮力。因此,在垂直地平线方向上,两者受力相等,能保持平衡。
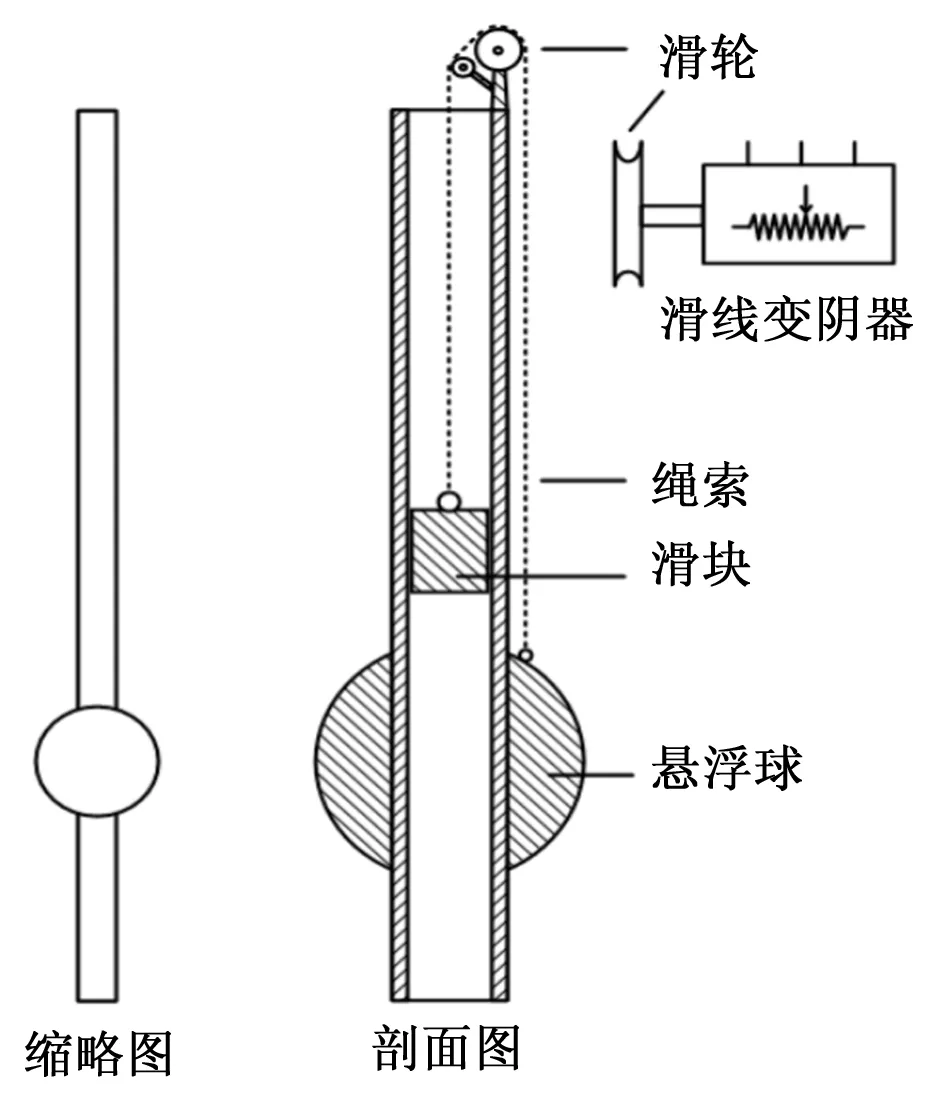
图3 水位检测部分结构
当水位上升或下降时,悬浮球跟随水位一起上升或下降,带动了固定在滑线变阻器轴上的滑轮旋转,从而改变了滑线变阻器的阻值。只要测量滑线变阻器的阻值,就可以得到水位的高低。
2.3 水位控制
水位控制部分包括水位传感器,变频器和交流水泵。
交流水泵结构简单,制造成本低,维护维修简单。1995年以后,随着大功率晶闸管大批量的生产和计算机控制系统的高速发展,交流水泵的调速变得非常简单。
交流水泵的流量Q与转速n成正比;扬程H与转速n的三次方成正比;电动机的转速n与电源频率F成正比。因此改变电动机电源频率,可改变电机即交流水泵的转速,从而达到调节给水流量和水泵的扬程的目的。
利用变频器实现调速节能运行, 是变频器应用的一个最典型的例子。变频器调速具有优良性能:1)高速响应、低噪声、大范围、高精度平滑无级调速;2)电机可以从低频慢慢升上去,防止启动转矩过大,损坏电机;3)节能,对电网干扰少。
水位控制部分的系统框图如图4所示。当水箱里的水位低于设定值时,液位传感器将水位反馈到MCU,经过PID运算,控制变频器,从而间接控制交流水泵,给水箱供水。使水箱里的水位等于设定值。

图4 水位控制部分结构
2.4 流量控制
流量控制部分包括流量传感器,调节阀和步进电机。
步进电机旋转的角度正比于脉冲数;绕组激磁时,电机停转的时候具有最大的转矩;由于没有电刷,可靠性较高,因此电机的寿命仅仅取决于轴承的寿命;优秀的起停和反转响应;步进电机最有意义的一个优点就是在开环系统里可以实现精确的控制。开环控制意味着不需要关于(转子)位置方面的反馈信息。这种控制避免了使用昂贵的传感器以及象光学编码器这样的反馈设备,因为只需要跟踪输入的步进脉冲就可以知道转子的位置。
因此,用步进电机控制调节阀,用流量传感器测流量并将结果反馈到MCU,MCU控制步进电机转子带动调节阀的执行机构旋转一定角度,使水流量达到设定值。
步进电机选择步进角为1.8°的步进电机,如果当前水流量非常接近设定流量,如果调整最小角度1.8°,就会超出需要调整的水流量。可以通过驱动器程序将步进角细分,步进角为1.8°的步进电机在8细分下步距角为1.8°/8=0.225°,细分后步进电机步距角按下列方法计算:步距角=电机固有步距角/细分数。
流量控制部分的系统框图如图5所示。当输出的水流量低于设定值时,流量传感器将流量反馈到MCU,经过PID运算,输出一定脉冲数,控制步进电机的正反转和旋转的角度,从而控制调节阀打开的大小,使流量等于设定值。

图5 流量控制部分结构
2.5 实验结果
通过对恒流量装置改进前后的流量数据分析, 绘制出如图6、图7所示的波动曲线对比图。从图中可以看出, 增加恒水位控制环节和PID控制后,流量波动很小, 能为堤坝健康实验提供稳定的水流量。
3 堤坝安全监控的研究
流水不仅给堤坝施加了巨大压力,还具有很强的冲击和侵蚀能力。水流越大,施加给堤坝的压力越大,对堤坝的冲击和侵蚀越大,堤坝坍塌的风险也越大。
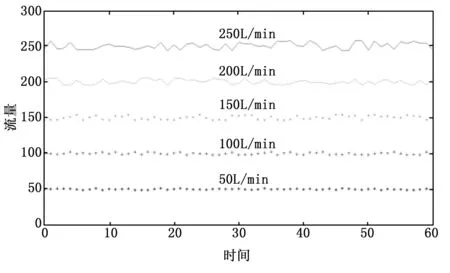
图6 改进前流量曲线
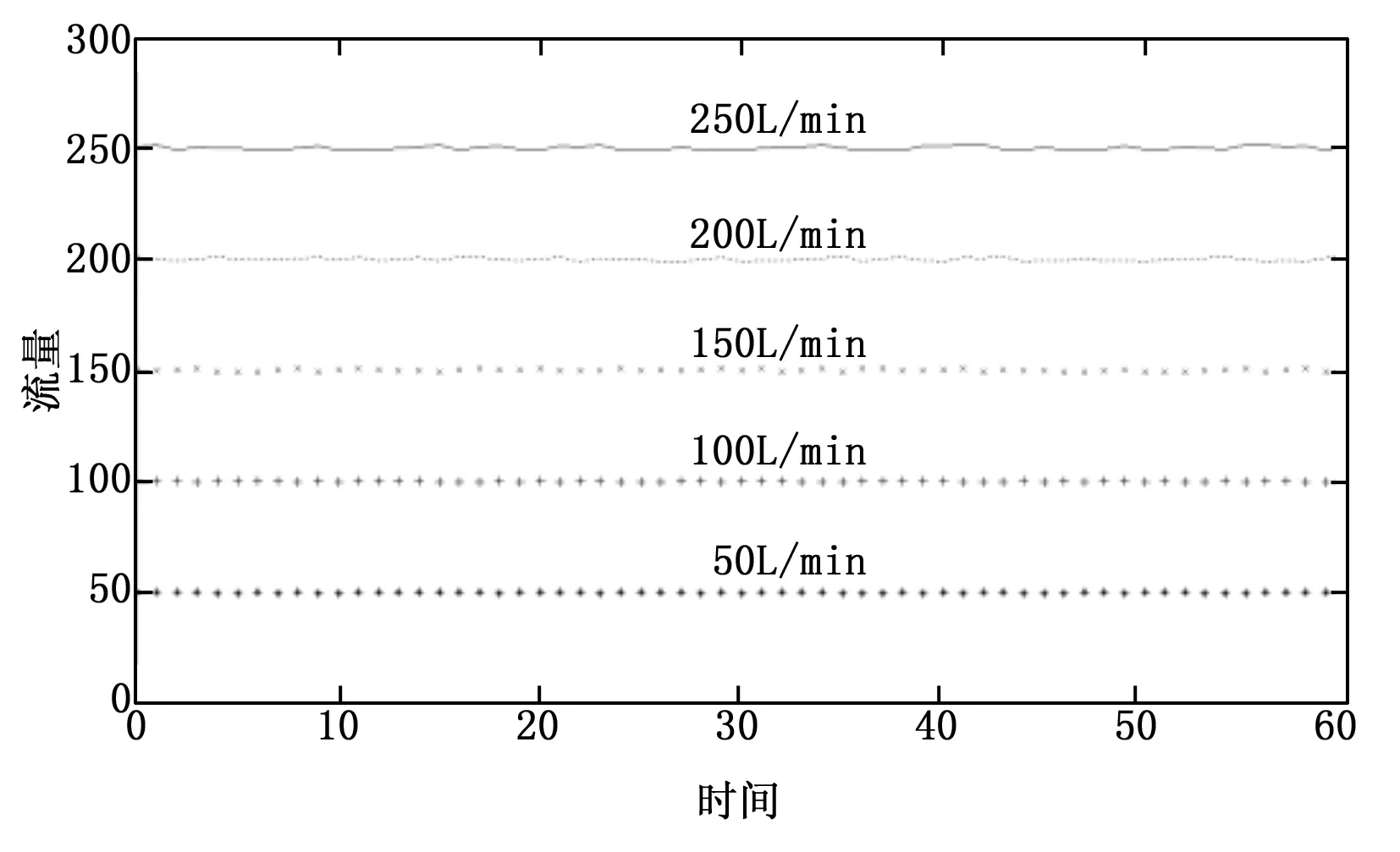
图7 改进后流量曲线
分布式光纤传感器具有抗干扰性强、监测距离长、空间分辨高等特点,特别是他分布式测量的特点非常适合监控堤坝,提供灾害预警。
由于布里渊频移的变化量不仅与应变有关,还和温度有关。因此,采用BOTDA测量水流量对堤坝影响时,需要排除温度的影响。在堤坝相邻的位置,平行布置两根光纤,其中一根光纤保持裸露,用于测量堤坝形变,另外一根光纤作为温度补偿,在光纤外部套入硬管,使光纤不随堤坝发生形变。由此,BOTDA可以测出堤坝的形变。图8中,白色实线代表裸露的光纤,白色虚线代表外部带有硬管的光纤。实验中,使用两根长度为2 km的光纤,将光纤中的210~215 m埋于堤坝中,一根作为测量光纤,另外一根作为温度补偿。
实验中,使用DiTeSt STA-R(分布式光纤温度应变检测系统)测量光纤形变,由于实验用的光纤短,可将空间分辨率设置的高一点,此时仍有保证较高的信噪比。设置空间分辨率为0.5 m,采样间隔为0.1 m。控制调节阀的大小,给堤坝分别提供100 L/min和200 L/min的水流量,监控光纤的布里渊频移。
实验结果如图9所示,随着水流量的增大,堤坝受到的压力也随着增加。由于受力,光纤会随着堤坝的变形而被拉伸,光纤的布里渊频移也随着增加。当水流量从100 L/min增大到200 L/min时,光纤的布里渊频移也随之增加。由此可见,光纤布里渊频移能正确反映出堤坝形变,及时提供预警。
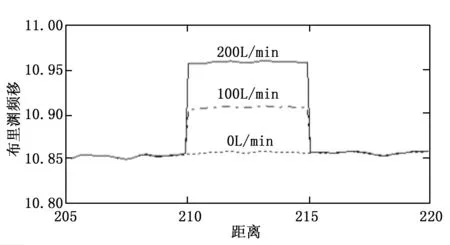
图9 不同流量下布里渊频移曲线
4 结束语
经过堤坝模型的搭建和实验,分布式光纤传感器对堤坝具有良好的监控预警效果,即在堤坝坍塌前洞悉前兆,及时提供预警,从而保护人民群众的生命财产安全。
[1] 朱勇辉,Visser P J,Vrijling J K,王光谦. 堤坝溃决试验研究[J]. 中国科学:技术科学,2011(2):150-157.
[2] 任健美,胡彩虹. 1998年长江流域特大洪水的思考[J]. 太原师范专科学校学报,2001(3):42-44.
[3] 黄志萍. 激光光散射仪及应用[J]. 现代仪器,2006,06:49-53,44.
[4] Boyd R W. Nonlinear Optics[M]. New York: Academic Press,2003.
[5] Parker T R, Farhadiroushan M, Handerek V A,et al.A fully distributed simultaneous strain and tempreature sensor using spontaneous Brillouin backscatter[J].IEEE Photinics Technilogy Letters,1997,9(7):979-981.
[6] Garus D,Krebber K,Schliep F,et al.Distributed sensing technique based on Brillouin optical-fiber Frequency Domain analysis[J].Optics Letters,1996,21(17):1402-1404.
[7] Horiguchi T,Tateda M.BOTDA nonde structive measuarement of single-mode optical fiber attenuation characters using Brillouin interaction[J].Journal of Lifhtwave Technology,1989,7(8):1170-1176.
[8] Box X,Webb D J,Jackson D.32km distributed temperature sensor based on Brillouin loss in an optical fiber[J].OpticsLetters,1993,18(18):1561-1563.
Research on Dyke Health Monitoring Based on BOTDA
Yu Zhiyong, Li Qing, Wang Yanjie, Zhou Zezheng, Wang Xianjin
(Institute of Mechanical and Electrical Engineering, China Jiliang University, Hangzhou 310018,China)
Aiming at the dyke collapsing, in order to avoid casualties and economic losses, the health monitoring of dyke and the timely warning are needed.Based on the BOTDA technology, through designing and building the experimental platform, to research the deformation of the dyke under different water flow by using the distributed optical fiber sensor.The experimental platform is composed of two parts of the constant flow device and the dyke. The constant flow device can provide accurate water flow to the dyke. The dyke will generate the corresponding deformation under different water flow.The distributed optical fiber sensor is embedded in the dyke, and when the dyke deformation occurs, the distributed optical fiber sensor will be stretched by the deformation of the dyke. The distributed optical fiber sensor can be measured and analyzed by using BOTDA technology. The results testify that the Brillouin frequency shift of the distributed optical fiber sensor can correctly reflect the dyke deformation, and the BOTDA technique is applied to the dyke health monitoring.
dyke; health monitoring; distributed measurement; optical fiber sensor; deformation
2015-11-24;
2015-12-16。
国家自然科学基金项目(60772008);国家自然科学基金项目(41376111);国家科技支撑计划子课题(2012BAK10B05-3);浙江省科技计划项目(2015C33045)。
俞志勇(1990-),男,浙江绍兴人,硕士研究生,主要从事检测技术方向的研究。
李 青(1955-),男,浙江杭州人,教授,主要从事检测技术方向的研究。
1671-4598(2016)06-0041-03DOI:10.16526/j.cnki.11-4762/tp
TP
A
猜你喜欢
江苏广播电视报·新教育(2022年1期)2022-05-15
青海电力(2022年1期)2022-03-18
光通信研究(2022年1期)2022-02-18
建材发展导向(2021年7期)2021-07-16
建材发展导向(2021年23期)2021-03-08
航空发动机(2020年1期)2020-06-13
文山学院学报(2018年3期)2018-07-06
潍坊学院学报(2016年2期)2016-12-01
大社会(2016年4期)2016-05-04
中国房地产业(2016年9期)2016-03-01
