
转发式北斗导航卫星信号性能评估的研究与实现
2016-11-17 10:24史丽晨岑立长王海涛
计算机测量与控制 2016年6期
史丽晨,岑立长,王海涛
(西安建筑科技大学 机电工程学院,西安 710055)
转发式北斗导航卫星信号性能评估的研究与实现
史丽晨,岑立长,王海涛
(西安建筑科技大学 机电工程学院,西安 710055)
北斗一代在使用过程中存在隐蔽性不良,定位实时性差等问题,为了实现北斗导航信号的性能评估,相对于以往的硬件形式,如硬件接收机、频谱分析仪、矢量网络分析仪等,提出了以软件接收机的方法对北斗导航信号进行性能评估;首先分析了转发式北斗导航信号评估的意义、内容与方法,并采用软件接收机的形式进行评估;然后研究了转发式北斗导航的信号性能评估关键技术,给出了捕获、跟踪、评估参数计算的程序流程;最后根据实测数据在Linux高性能集群系统上进行了测试验证,实现了北斗导航信号的捕获、跟踪以及评估中的评估参数计算;测试结果表明,文章中的设计方法可实现北斗导航信号性能的评估,效果良好,评估内容、指标易于调整,便于软件算法参数的测试、升级,可为后续的卫星导航信号评估以及算法测试等提供了一定的依据。
转发式;集群;北斗导航;性能评估
0 引言
2015年7月25日,两颗新一代北斗导航卫星成功发射升空,进行在轨验证北斗卫星导航系统总体方案与技术体制,为建成全球导航卫星系统开展全面验证[1]。
北斗一代在使用过程中存在隐蔽性不良,定位实时性差等问题,且只能实现区域导航定位。卫星播发的空间信号包括伪码观测值和载波观测值,利用伪码观测值可以实现几十米到米级的定位精度,载波观测值可以实现绝对定位厘米级和相对定位毫米级的高精度定位[2],导航定位精度又是衡量卫星导航系统性能的重要指标,而空间信号性能是导航定位精度关键因素之一,因此,对北斗导航信号性能进行评估意义重大。2014年中国科学院国家授时中心(NTSC)便提出了对北斗导航信号性能质量进行评估测试,为北斗卫星导航系统性能后续改善或增强提供一定的依据。本文依托NTSC相关平台,就北斗导航信号的性能评估进行了分析,研究了评估的关键技术,并在Linux高性能集群系统上进行了试验验证。
1 转发式北斗卫星导航信号性能评估分析
图1表示转发式卫星测轨原理,i站主钟的时间信号经调制后发送给卫星,卫星转发i站信号给j站,j站解调来自i站的时间信号,确定接收到的时间信号和j站主钟的时间信号之间的时刻差,从而确定i站到卫星、再从卫星到j站之间的距离[3]。

图1 转发式卫星测轨原理
与其他卫星导航系统不同,新一代北斗卫星导航系统是转发式卫星导航系统,兼具无源定位与有源定位功能[4],原子钟直接安置在地面导航中心站上,利用卫星转发器转发上行导航信号后广播下行的方式实现导航定位。相比直发式系统,转发式导航系统的地面原子钟精度高稳定性好,易于管理、维修和升级,突破了星载原子钟研制困难成本高的技术瓶颈,不用发射专门的导航卫星,易于快速建成,降低空间投资。
对北斗导航信号性能进行评估可以实现北斗导航信号的实时监测与高精度分析,有效的评估信号是否存在异常,并能给出信号异常原因。评估内容主要包括:信号射频特性、测距码特性、信号调制特性、测距性能、空间信息、卫星状态等。评估的过程如图2所示。
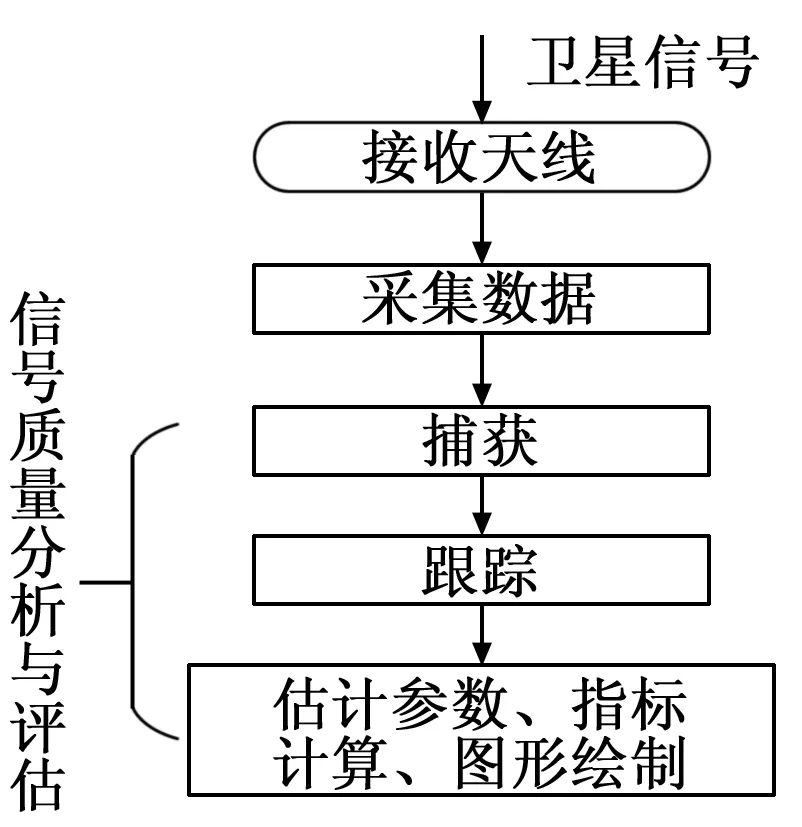
图2 评估过程示意图
在天线接收到在轨卫星信号后,通过对采集设备的采集数据进行信号质量分析与评估来实现北斗导航信号性能评估,首先要捕获卫星信号,得到初始载波频率和码相位粗略值,然后以捕获结果作为跟踪部分的初始条件,保持与卫星信号的精确同步,最后由相应的程序来计算评估参数和指标,绘制相关图形等。
软件接收机和硬件接收机都可以实现卫星信号的捕获与跟踪,硬件接收机是目前市场上技术成熟、应用广泛的产品,其射频前端与基带数字信号处理的电子器件集成在不同的专用集成电路(ASIC)芯片中,而信号跟踪环路控制、导航定位解算以及用户界面与接口驱动等软件,信号处理所涉及的算法、相关器、跟踪通道、参数等都固化在相关的芯片中[5]。软件接收机基于一个通用的硬件平台,通过对硬件加载程序来实现基带数字信号处理算法和导航定位解算,在改变算法时只需对软件程序做出相应修改后重新下载即可。
相比之下,硬件接收机运算能力强,处理效率高,但没有可编程性,缺乏灵活度,一旦涉及算法的变化、不同的参数、甚至评估另外一种全新的导航信号,就得重新设计、生产新的ASIC,其费用与周期较长。软件接收机则具有高度的可配置性,体现在[6]:
1)修改软件即可适应新的导航信号,如GPS或伽利略信号;
2)易于测试新的算法,供研究机构研究;
3)根据环境调整门限,调整相关参数;
4)便于修改评估内容与指标,满足不同评估需求。
北斗系统是建设中的卫星导航系统,大量的新技术在不断应用,对北斗导航信号测试评估必将涉及算法参数的修改、评估内容与指标的变更等,采用软件接收机的形式对北斗导航信号进行性能评估则保证了评估的灵活性。
2 北斗导航信号评估的关键技术分析
2.1 北斗导航信号的捕获
北斗卫星导航信号由载波、导航数据电文和伪随机码三部分组成,捕获是利用伪随机码良好的相关特性,当本地伪随机码的码相位、本地载波的频率和输入信号中的码相位以及载波频率相匹配时,有最大的相关值。本地码相位与输入信号中的码相位在任何一边的偏移超过一个码元时,有最小的相关值,当检测到最大相关值时便达到了捕获的目的。
本文采用并行码相位搜索算法[7],利用快速傅里叶变换处理循环相关,运算量小,捕获速度快。设长度有限且为N的序列x(n)和y(n)的离散傅立叶变换分别为:
(1)
(2)
则x(n)和y(n)的循环互相关为:
(3)
省略缩放因子1/N,则z(n)的N点离散傅里叶变换为:
(4)
由以上分析可以看出,x(n)和y(n)的循环互相关z(n)的傅立叶变换可以用这两个序列的频域表达式X(k)的复共轭X*(k)和Y(k)表示。然后再对Z(k)取反傅立叶变换,就可以得到z(n)了。
图3所示为C语言下捕获程序流程图,具体过程如下:

图3 捕获部分程序流程图
1)产生本地载波信号Xi(n)与PRN码c(n),对c(n)作DFT运算C(n),取其复共轭C*(n);
2)从输入信号中取1 ms的数据S(n)与Xi(n)相乘,将结果进行DFT变换,运算结果记作Si(k);
3)将Si(k)和C*(n)相乘,结果为Di(k);并进行IDFT变换到时域di(n),并取绝对值|di(n)|;
4)在|di(n)|中找到最大的相关峰值,并与预先设定的阈值比较,计算出在粗捕获后载波频率估计量f0和码偏估计量△。
5)再次用上述过程得到的码偏估计值△去除一段原始数据中的PRN码进行精捕获,找出相关峰,并确定最终的捕获结果。
2.2 北斗导航信号的跟踪
对北斗导航信号进行跟踪可以得到更精确的载波频率和码相位,进而解调出导航数据进行评估。本文采用延迟锁相环(DLL)和Costas环来进行跟踪[6],其C程序流程如图4所示。

图4 跟踪部分程序流程图
具体过程为:
1)以捕获结果为跟踪的初始值;
2)取1 ms数据与本地载波相乘,转换到基带;
3)基带信号与超前、即时、滞后码序列分别做相关运算,得到相关结果;
4)鉴相器根据相关结果,计算相位误差,更新载波频率与码相位,实现精确同步。
2.3 评估参数计算
捕获、跟踪计算后,根据所得到的参数信息,对功率谱、眼图、信号调制星座图特性、相关曲线特性、多普勒、测距码间相位一致性等评估参数进行计算。此类计算,由独立的Worker程序在集群系统上并行运算,其C程序流程如图5所示。
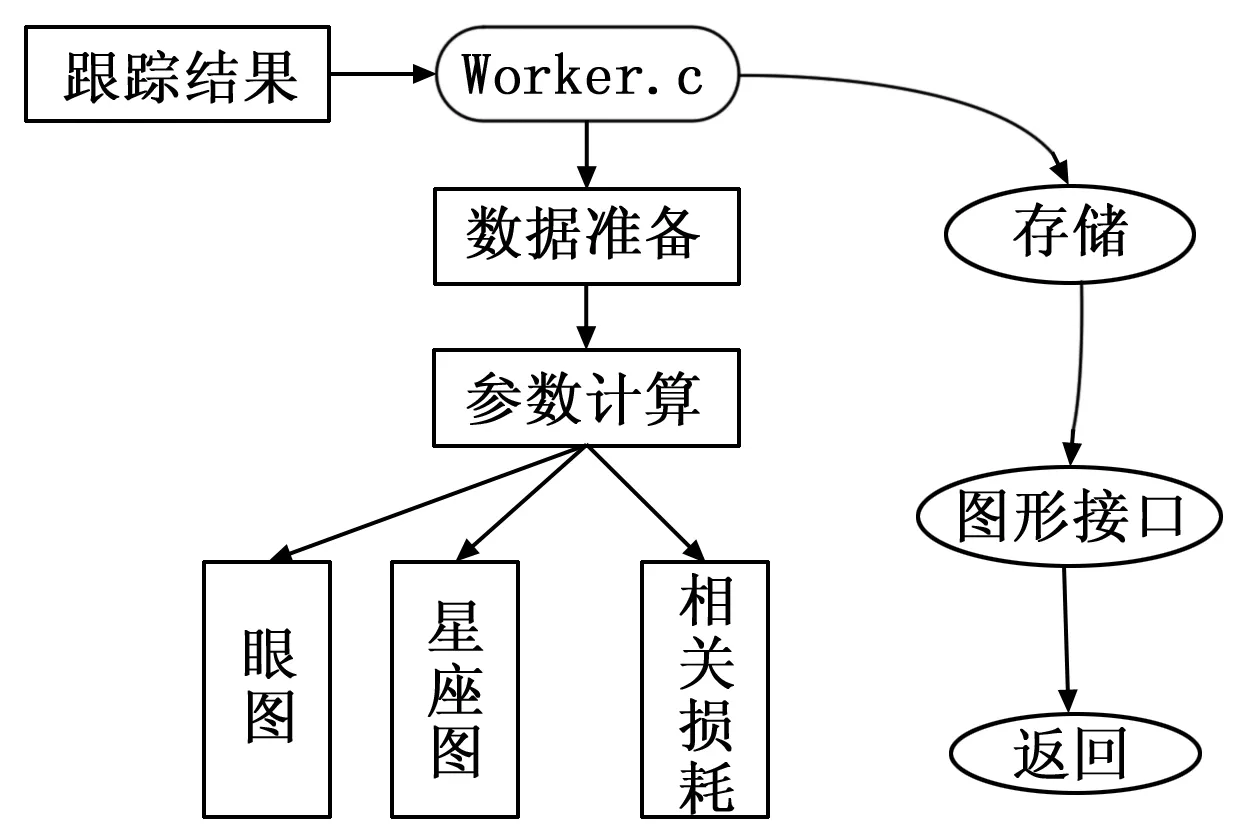
图5 评估参数计算流程图
3 测试验证
3.1 测试平台
本文测试依托NTSC的Linux高性能集群系统平台,如图6所示,其硬件配置包括了1台负责任务接收下发、工作控制的胖节点服务器,1台进行数据存储的存储服务器,1台用于管理、监测工作状态的管理服务器,7台执行具体任务分析计算的计算节点服务器,节点间的网络环境为万兆局域网,使用的操作系统为Linux(CentOs6.4 64位)。
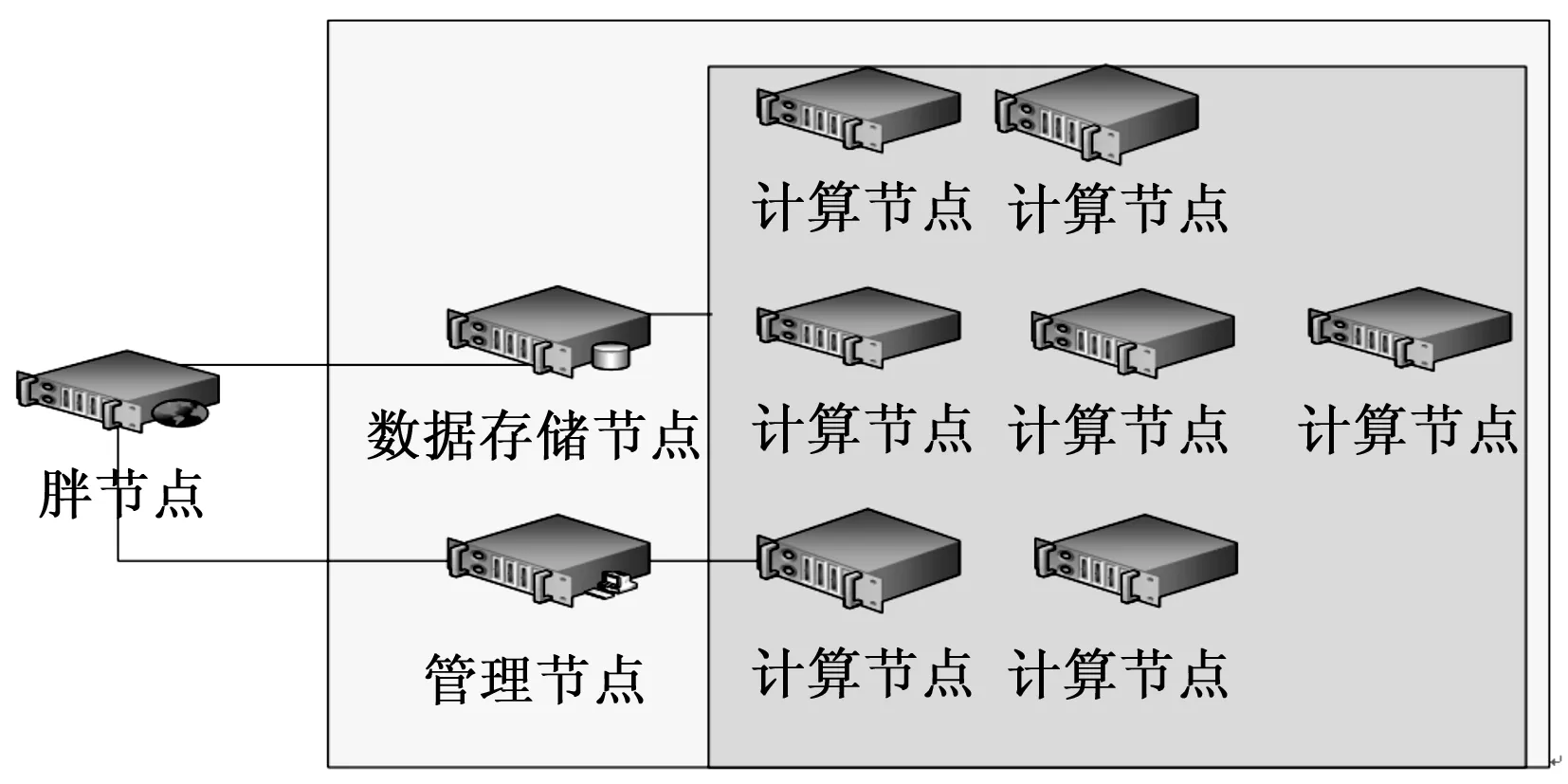
图6 集群硬件环境配置图
3.2 测试结果与分析
测试数据来源于NTSC昊平观测站实测数据,信号为北斗信号,中频为187.5 MHz,采样频率为250 M,码片长度为2046,在Linux高性能集群系统平台上进行,相关参数设置为搜索总带宽(acqSearchBand)为14 kHz,捕获门限(acqThreshold)为2.5,重采样(resample)为200,码跟踪环参数中,噪声带宽(dllNoiseBandwidth)为3 Hz,阻尼比(dllDampingRatio)为0.7,相关器的码元差(dllCorrelatorSpacing)为0.5码元。载波跟踪环路中,噪声带宽是(pllNoiseBandwidth)50 Hz,阻尼比(pllDampingRatio)是0.7。捕获与跟踪结果如图7、8所示,可以看到捕获卫星为1号卫星,捕获特性良好,相关曲线主峰波形较标准,无明显副瓣;跟踪特性中软件接收机处理环节输出的PLL曲线、DLL曲线和解调曲线较快趋于平滑稳定,曲线抖动范围较小,迹线清晰。

图7 捕获结果图
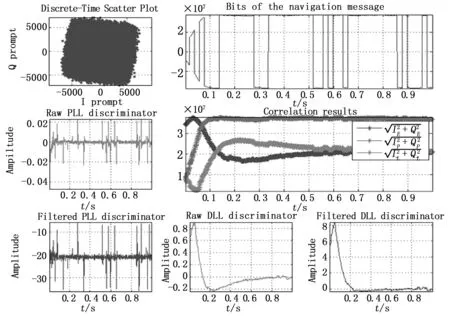
图8 跟踪结果图
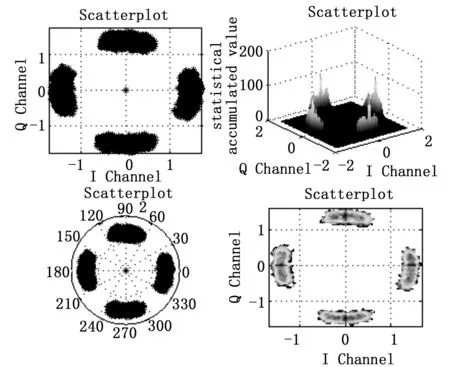
图9 参数修正前的信号调制特性图
图9与图10为对同一信号采用不同参数时,所得到的信号调制特性图,可以看到参数修正后信号星座图正常,载波相位正交误差较小,幅度误差较小。

图10 参数修正后的信号调制特性图
4 结论
本文首先对转发式北斗卫星导航信号的性能评估及其过程进行了分析,对比了软件与硬件接收机评估形式的优缺点后,采用了软件接收机的形式进行评估,然后给出了评估过程中捕获、跟踪和评估参数的C程序流程,最后依托NTSC相关平台,根据实测数据,在Linux高性能集群系统平台上进行了测
试验证,实现了北斗导航信号的捕获、跟踪以及评估中的评估参数计算。测试结果验证了评估的有效性,可实现北斗导航信号性能评估与分析,效果良好,可为后续的卫星导航信号评估以及算法测试等提供了一定的依据。
[1] 我国成功发射2颗新一代北斗导航卫星[EB/OL].http://www.yunzhitai.com/discover/space/4471.html.
[2] 胡志刚.北斗卫星导航系统性能评估理论与实验验证[D].武汉:武汉大学,2013.
[3] 雷 辉.基于转发式的北斗卫星导航系统地球静止轨道卫星精密定轨试验[J].测绘学报,2011,40:31-33.
[4] 王艳红,赵文智,杨 明.北斗卫星导航系统及其于民航导航的应用[J].计算机测量与控制,2014,22(2):496-498.
[5] 谢 刚. GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[6] 吴娟丽. GPS软件接收机的研究与Matlab实现[D]. 西安:长安大学,2009.
[7] Borre K, Akos D M, Bertelsen N.A Sothware—Defined GPS and Galileo Receiver[M].Boston:BirkhauSer,2007.
Research and Realization of Performance Evaluation for Transponder BDS Navigation Satellite Signal
Shi Lichen, Cen Lizhang, Wang Haitao
(College of Mechanic and Electronic Engineering, Xi′an University of Architecture and Technology, Xi′an 710055, China)
Beidou Isthas bad performance in concealment and real-time positioning. In order to achieve the performance evaluation of Beidou navigation signal, relative to the previous form of hardware, such as hardware receiver, spectrum analyzer, and vector network analyzer, etc., the passage puts forward a method of software receiver to evaluate performance of Beidou navigation signals. First, the significance, content and method of performance evaluation were presented, and the form of software receiver was used to evaluate. Then, key technology for performance evaluation of new BDS signal was studied, and a procedure for acquisition and tracking was given and tested on Linux high performance cluster system at last , as well as parameter calculation. Experiments show that the evaluation can be realized with good effect;evaluation contents、index are easy to adjust and promotion for algorithm、 parameters testing of software is convenient; and can provide the certain basis for satellite navigation signal in subsequent evaluation and algorithm test.
transponder; cluster; BDS navigation; performance evaluation
2015-11-09;
2015-12-10。
史丽晨(1972-),女,陕西西安人,教授,博士研究生导师,主要从事故障诊断、信号测试方向的研究。
1671-4598(2016)06-0282-04
10.16526/j.cnki.11-4762/tp.2016.06.077
TP806+.1
A
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
现代工业经济和信息化(2016年8期)2016-05-17
西部广播电视(2015年10期)2016-01-18
