
直接力/气动力复合控制系统的有限时间镇定*
2016-11-16 08:15:14潘瑾瑜马建伟宋晓娜
火力与指挥控制 2016年10期
潘瑾瑜,马建伟,宋晓娜
(河南科技大学电气工程学院,河南洛阳471023)
直接力/气动力复合控制系统的有限时间镇定*
潘瑾瑜,马建伟,宋晓娜
(河南科技大学电气工程学院,河南洛阳471023)
考虑到复合控制系统中,直接力的离散特性会使系统的设计复杂化。针对采用姿控式直/气复合控制的导弹,基于有限时间稳定理论,引入辅助滑模面,研究其控制系统的有限时间镇定,得到一个受控良好的复合控制系统。在此基础上,利用辅助模糊控制,对系统不确定性进行估计,进一步改善了复合系统的控制品质。最后以俯仰通道为例,对所提出的方法进行仿真,结果验证了该方法的有效性。
复合控制,有限时间稳定,辅助滑模面,模糊控制
0 引言
为了满足导弹在高空作战时的机动性能,导弹需要较大的机动过载能力并具有较快的响应速度。仅依靠独立的气动力控制,其末制导阶段可用过载小,空气舵响应有所延迟,容易导致目标逃逸,因此,需要考虑引入直接侧向力的复合控制策略来弥补气动力控制的不足。通常采用姿控式复合控制,即利用空气动力和安装在距离导弹质心一定距离的弹首或弹尾的微小型火箭发动机系统相结合对弹体进行控制,能够减小导弹建立攻角所需要的时间,提高机动能力。
近年来变结构控制理论引起了人们极大的兴趣,文献[1]从数学原理上解释了广义李雅普诺夫稳定并估计了变结构控制的收敛时间。在此基础上,针对二阶不确定系统,利用有限时间干扰观测器进行系统估计,然后基于非奇异终端滑模控制设计动态控制分配算法[2],或者利用快速终端滑模控制器,保证不连续控制器闭环系统有限时间内的稳定性[3]。为了有效抑制滑模控制带来的抖振,基于模糊神经网络提出一种改进的滑模控制方法[4-5]。利用自适应模糊逼近器,构造误差滑模面来补偿误差和干扰的影响,通过自适应调节参数来实现系统的稳定性[6]。文献[7]基于李雅普诺夫理论导出闭环稳定条件。针对直/气复合控制系统,文献[8]利用有限时间稳定理论对气动舵进行控制,基于返步法研究直接力控制,最后通过“隐攻角”反馈进行增稳。但是,直/气复合控制系统研究仍然存在许多问题亟待解决。
本文采用变结构控制理论,针对姿控式直/气复合控制系统,建立相应的模型并进行分析简化。针对气动力控制系统设计辅助滑模面,加入模糊辅助控制,对开关项进行估计优化,达到去抖动的效果。以俯仰平面为例,设计复合控制系统的控制律,实现了复合控制系统的有限时间镇定。最后进行仿真验证。
1 复合控制系统数学模型建立
由于直接力/气动力复合控制系统工作在导弹的末制导阶段很短的时间内,可以将导弹的飞行速度和飞行高度视为常值。假设导弹为理想刚体,质心位置恒定,质量不变。在铅直平面内,导弹在俯仰通道的数学模型为:
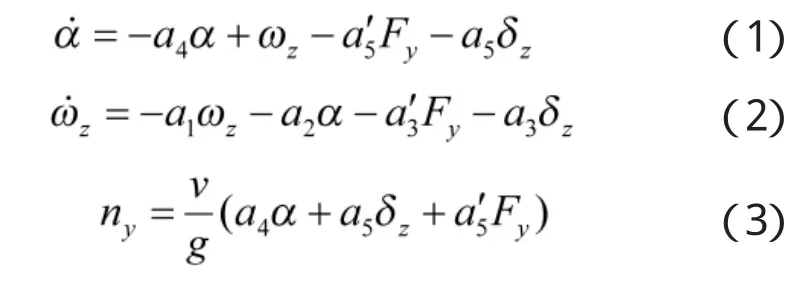
其中,α为导弹的攻角,ωz为角速率,δz为舵偏角,Fy为直接力,ny为过载,v为导弹的速度,g为重力加速度。
整理式(1)~式(3)可得:
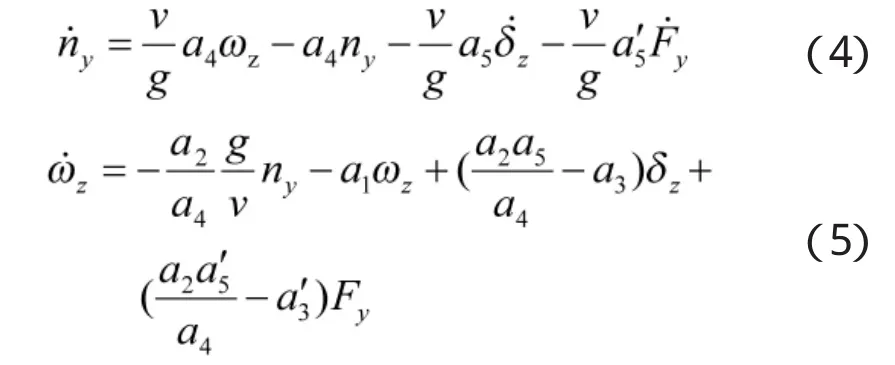
由于过载主要由攻角α产生的气动力提供,即:

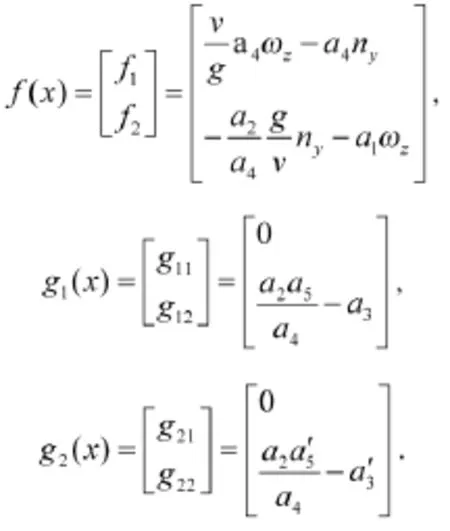
所以选取过载ny和角速率ωz为复合系统的状态变量,舵偏角δz和直接力Fy为复合系统的控制输入,选取法向过载为系统的输出,则可写成如下的仿射形式:

2 直/气复合控制系统的设计
在直/气复合控制系统中,由于脉冲发动机的工作特性,直接力是离散的,气动力是连续的。因此,将气动力控制设为滑动模态运动的等效控制,直接力控制设为其切换控制,保证系统能够在有限时间内到达滑模面并进行滑动运动。
2.1气动力控制系统设计
假设给定的过载指令连续可微,将给定的法向过载指令记作nyc,则系统的切换函数可设计为:

其中,km<0。
将系统的跟踪误差eny记作:


由于km<0,易知系统的滑动模态是渐近收敛的,由此保证了系统在滑模面上过载的跟踪误差是渐近稳定的。
对切换函数式(8)求导可得:

令滑模面导数为零,得:

由于实际系统中存在未建模干扰或其他不确定性,故考虑基于反馈信号来估计干扰,设计对参数不确定性具有鲁棒性的模糊辅助控制器,使得跟踪误差变量满足:

引理1[9]如果存在一个一致连续函数满足存在且有限,那么

引理2[9]如果存在一个正数,满足

那么,动态系统式(7)呈指数稳定。
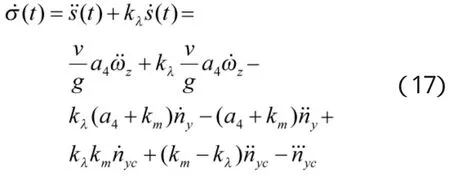
为了更好地利用模糊控制对气动力控制进行优化,建立辅助滑模面如下:

对式(16)中辅助滑模函数σ关于时间t求导得:
关于不确定量d(t)的滑模函数Sd(t)可设为:

则为了估计不确定量d(t),设计辅助模糊控制器D(t)的规则如下:
如果Sd(t)>0,那么D(t)增加;
如果Sd(t)<0,那么D(t)减小。
为了保证D(t)不会过大,引入变量ΔD(t),G为比例系数,可得:

定义模糊化论域为Sd=[-15,15],ΔD=[-1.5,1.5],在此基础上定义模糊子集如下:
其中,NB为负大,NM为负中,ZO为零,PM为正中,PB为正大。
为了说明模糊变量在某区域的值的隶属度,选用三角形和高斯型隶属函数,模糊子集的隶属函数可表示如图1和图2所示。
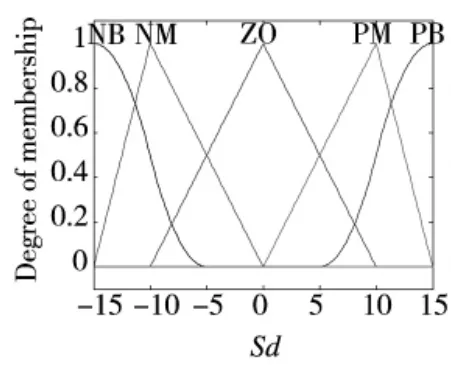
图1 模糊输入隶属函数
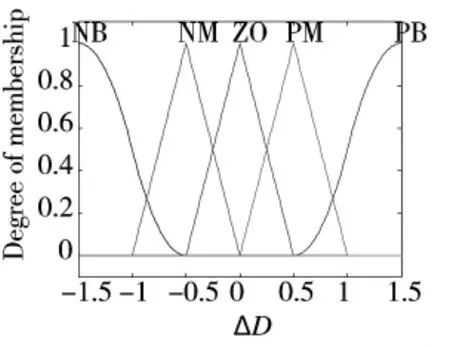
图2 模糊输出隶属函数

表1 模糊控制规则
将式(12)代入式(7)中,并令u2=0,得系统的等效控制如下:
定理若ε>0,基于式(20)的模糊滑模控制器u1,复合控制系统式(7)满足李雅普诺夫稳定,则系统可以跟踪期望过载。
证明:对式(17)考虑设计李雅普诺夫函数为

对其进行求导可得:

将式(12)代入式(21),可得:

对式(22)两边积分,可得:

由于V(t)为正,V(0)是有限的,易得:

根据引理1可得:
2.2直接力控制系统设计
取系统的切换控制为:

为了节省发动机的燃料资源,根据跟踪控制的精度要求,可以确定启动发动机时的最小阈值smin,确保当系统进入该最小阈值的邻域内,不再启动脉冲发动机。
假设邻域的大小为δ,且直/气复合控制系统能够保证维持在邻域内,则系统的状态满足:

此时系统原来在S上的滑动模态方程变为在邻域内的动态方程:

结合新的状态条件式(28),可以确定跟踪误差满足:


则系统的切换控制变为:
现考虑在由等效控制u1和切换控制u2所构成的复合控制器的作用下,系统状态可以达到切换面并保持在切换面上:

当系统的状态尚未进入滑动模态时,u2不参与控制作用,由于km<0,系统是渐近稳定的,可以保证系统不会偏离滑动模态。
2.3复合控制系统有限时间稳定性分析
为了方便描述,考虑如下非线性系统:

定义1[10-11]考虑式(35),系统的平衡点=0为有限时间稳定的,当且仅当系统是Lyapunov稳定且有限时间收敛。即对,存在一个连续函数,使得式(35)的解满足:当时,有和?;当时,有。若,则原点是全局有限时间稳定的平衡点。
引理3[11]考虑式(35),假定是定义在⊂U上的可导函数,令实数η>0,0<μ<1,使得V在上正定,且在上满足:

证明:当系统趋近滑动模态时,u1和u2共同作用。定义系统的李雅普诺夫函数为,对其进行求导可得:

将u1、u2和式(7)代入式(37),得到:

由导弹的气动参数物理意义易知,p为正,即

根据李雅普诺夫定理,由引理3可得,滑模面函数S将在有限时间内到达切换面s=0上。
由以上分析可知,系统在全局状态空间内是稳定收敛的。证毕。
至此,以气动力控制的等效控制和以直接力控制为切换控制的复合控制系统设计完毕。
3 仿真结果及分析
发动机稳态推力值FT=2 300 N,工作时间T=0.025 s,动态时间=0.005 s,姿控发动机组到导弹质心的平均距离为LT=1 m,km=-15,N=5,smin=2.3,smax=10,系统状态初值均取为0,输出跟踪指令nyc幅值为10。为了验证模糊滑模控制(FSMC)的效果,在相同条件下,与滑模控制(SMC)在Matlab中进行仿真对比,仿真结果如下。
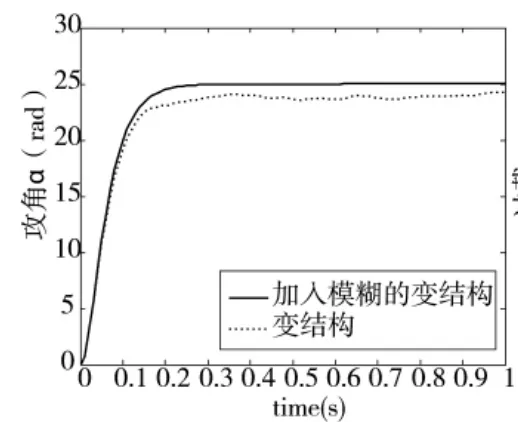
图3 攻角跟踪响应
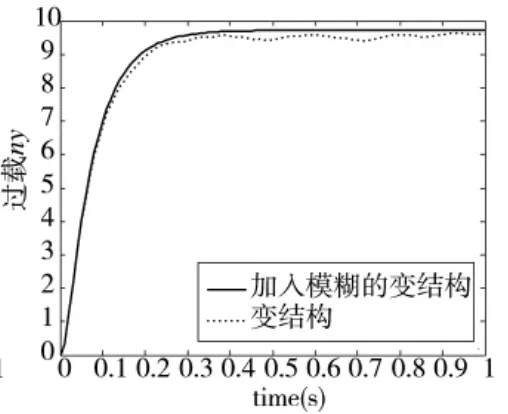
图4 过载跟踪响应
实线为FSMC的复合控制响应,虚线为SMC的控制响应。图3和图4为导弹攻角和过载的跟踪响应曲线。可以看出,在过载指令发出的0.15 s后,实际输出就达到指令的90%,由于系统存在不确定干扰,SMC在此基础上小幅振荡,而FSMC在0.1 s后十分平稳。跟踪的响应时间短,系统不存在超调。下页图5为俯仰角速度响应,在0.04 s时达到最大值,之后呈指数衰减。图6为气动力控制响应曲线,FSMC的变化显然比SMC平稳,且在有限时间镇定。图7显示了脉冲发动机的控制效果,在FSMC的发动机关闭后,SMC在后期不断开启关闭,其有限固体燃料的消耗明显增大,图8的脉冲发动机开启个数更直观地解释了这一结果。脉冲发动机一共开启了31个,并集中于过载响应的上升阶段,此时直接力起主导作用。
图5 俯仰角速度响应

图6 气动力控制
图7 侧喷发动机控制
图8 脉冲发动机消耗个数
4 结论
本文针对姿控式复合控制系统研究了其控制器的设计和实现问题。以俯仰平面为例,利用变结构控制设计气动力等效控制和直接力切换控制。在此基础上,引入辅助滑模面,利用模糊控制对气动力控制器进行优化,基于有限时间理论实现了复合系统的镇定。仿真结果表明通过等效控制和切换控制的组合分配,可以有效缩短响应时间,提高导弹可用过载和机动能力,同时减少固体脉冲发动机有限燃料的浪费,显示了较好的鲁棒性和稳定性。
[1]ANDREY P,LEONID F.Stability notions and Lyapunov functions for sliding mode control systems[J].J FRANKLIN I 351,2014:1831-1856.
[2]郭超,梁晓庚,王俊伟,等.临近空间拦截弹的非奇异终端滑模控制[J].宇航学报,2015,36(1):58-67.
[3]EMMANUEL C Z,JAIME A M,LEONID F.Fast second-order sliding mode control design based on Lyapunov function[J].Conference on Decision and Control,IEEE. 2013,10(13):2858-2863.
[4]NGUYEN T B T.Improved adaptive sliding mode control for aclassofuncertainnonlinearsystemssubjectedtoinputnonlinearityviafuzzyneural networks[M].Mathematical ProblemsinEngineering,2015.
[5]赵艳辉,张公平,杨育荣.直接力气动力复合控制导弹的模糊逻辑自动驾驶仪设计[J].弹箭与制导学报,2014,34(3):33-36.
[6]王昭磊,王青,冉茂鹏,等.基于自适应模糊滑模的复合控制导弹制导控制一体化反演设计[J].兵工学报,2015,36(1):78-86.
[7]ALIREZA N,SING K N,AKSHYA S.Adaptive sliding modecontrol foraclassof MIMOnonlinearsystemswithuncertainties[J].J FRANKLINI 351,2014:2048-2061.
[8]赵明元,魏明英,何秋茹.基于有限时间稳定和Backstepping的直接力/气动力复合控制方法[J].宇航学报,2010,31(9):2157-2164.
[9]郭雯雯,马慧敏,龚铮.直接力/气动力复合控制系统快速原型设计[J].四川兵工学报,2013,34(12):71-74.
[10]KHALIL H.NonlinearSystems[M].NewYork,1992.
[11]BHAT S P,BERNSTEIN D S.Finite-time stability of continuous autonomous systems[J].SIAM Journal of Control andOptimization,2000,38(3):751-766.
Finite-time Stabilization for Lateral Jet and Aerodynamics Compound Control System
PANJin-yu,MA Jian-wei,SONG Xiao-na
(School of Electrical Engineering,Henan University of Science and Technology,Luoyang 471023,China)
Considering the lateral jets of the compound control system,the discrete characteristic of lateral jet makes system complex.For the compound control system of missile by means of combining the aerodynamics control with lateral jets control,based on the theory of finite time stability,the compound control system is designed by adding an auxiliary sliding surface.Then the finite-time stabilization problem of control system is designed.The response property of the compound control system is further improved by building a fuzzy auxiliary controller to estimate the uncertainty of the system.Take the pitch plane for example,the simulation results show the effectiveness of the proposed design.
compoundcontrol,finitetimestability,auxiliaryslidingsurface,fuzzycontrol
TJ765.2
A
1002-0640(2016)10-0075-05
2015-08-13
2015-09-16
国家自然科学基金资助项目(61203047)
潘瑾瑜(1991-),女,河南洛阳人,硕士研究生。研究方向:飞行器制导与控制。
猜你喜欢
遥测遥控(2022年1期)2022-02-11 08:01:40
北京航空航天大学学报(2020年3期)2021-01-14 00:36:50
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
北京航空航天大学学报(2017年11期)2017-04-23 08:30:21
电测与仪表(2015年21期)2015-04-09 11:52:14
中国铁道科学(2014年1期)2014-06-21 06:34:16
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:03
振动、测试与诊断(2014年5期)2014-03-01 01:14:32
