
基于多雷达的临近空间目标检测前跟踪算法
2016-11-15 06:12梁志兵王嘉铭
传感器与微系统 2016年10期
王 睿, 梁志兵, 王嘉铭, 张 豪
(1.空军工程大学 防空反导学院,陕西 西安 710051;2.空军飞行学院,陕西 西安 710037)
计算与测试
基于多雷达的临近空间目标检测前跟踪算法
王 睿1, 梁志兵1, 王嘉铭2, 张 豪1
(1.空军工程大学 防空反导学院,陕西 西安 710051;2.空军飞行学院,陕西 西安 710037)
针对临近空间目标的低可探测性和多雷达采样周期与测量精度不一的问题,提出一种基于概率网格和多维Hough变换的多雷达检测前跟踪(TDB)算法。利用概率网格将雷达测量数据概率化,通过多维Hough变换在多维空间建立初步候选航迹,利用基于不敏变换的空间融合方法得到目标数目及轨迹。仿真实验表明:该算法能够在密集杂波下实现弱小目标的有效检测。
临近空间目标; 多雷达; 概率网格; 不敏变换; 多维Hough变换; 检测前跟踪
0 引 言
临近空间飞行器具有飞行速度快、机动性强、RCS小等特点[1,2],使得现有的武器装备对其探测难度很大。在未来高技术战争中,临近空间飞行器必将大量用于战场,如何对其进行有效的探测发现已成为现代防空系统作战中最为紧迫的课题之一[1]。
目前,对于低信杂比条件下的多目标检测问题,主要采用检测前跟踪(track-before-detect,TBD)技术[3,4]。而Hough变换因其对随机噪声有较强的鲁棒性、不需要目标先验信息且适合多目标跟踪检测的优点,被广泛应用于TBD技术中[5~11]。现有的基于Hough变换的TBD(HT—TBD)技术主要集中在单传感器应用。但临近空间飞行器时敏性强,其会在几个扫描周期内发生严重的距离走动,使得基于单传感器的HT—TBD技术对其检测性能显著下降。
针对上述问题,文献[10]提出一种基于雷达网的HT—TBD方法,以期较短时间内有效检测目标,但未考虑多雷达测量精度和采样周期不同的问题,检测结果包含较多杂波。而文献[12]提出的概率网格可有效解决多雷达精度不一的问题;文献[8]提出的多维Hough变换能够充分利用雷达测量数据信息,有效去除杂波,测量精度更高。
本文在文献[8,10,12]的基础上,研究一种基于概率网格和多维Hough变换的TBD方法。该算法可解决多雷达采样周期和测量精度不一的问题,并可去除大量杂波,从而实现目标的有效检测。
1 观测模型
假设多雷达系统的坐标原点相同、共用一个坐标系,且各雷达异步工作、采样周期和测量精度不同。设探测区内有S(S≥1)个匀速直线运动目标,N部雷达,且雷达i(i=
1,…,N)在时刻t得到mi(t)个测量值,mi(t)≥S。假设雷达每次扫描杂波个数服从泊松分布P(λ),杂波在探测区域内均匀分布,且满足mi(t)-S=P(λ)。雷达的测量点迹信息可表述为plot={距离r,方位角φ,时戳t,回波幅度I}
(1)
式中 时戳t为雷达获得点迹的时刻,回波幅度I的概率密度函数服从瑞利分布[13],即
量测源于目标
(2)
量测源于杂波
(3)
式中 SNR为期望的目标回波信噪比。
2 算法原理
首先利用概率网格将雷达测量数据概率化,然后通过多维Hough变换在多维空间建立初步候选航迹,最后利用基于不敏变换的空间融合方法得到目标数目及轨迹。算法流程框图如图1所示。

图1 算法流程框图Fig 1 Flow chart of this algorithm
2.1 概率网格与多维Hough变换
由于Hough变换性能限制,难以选取合适的参数空间间隔来平衡处理不同精度的多雷达量测数据。对此,本文将利用文献[12]提出的概率网格来解决多雷达测量精度不一的问题。
多维Hough变换是指将量测数据在x—y,x—t和y—t三个空间分别进行Hough变换,然后将三次变换的结果融合获得目标航迹,其能够解决传统Hough变换在x—y空间多杂波共线形成虚假航迹以及在x(y)—t空间目标平行飞行时的航迹重叠等问题[8]。
假设第i部雷达的坐标为(xi,yi),雷达某一位置测量值为rmi和φmi,测距和测角误差分别为dr和dφ,即
(4)
则空间任意位置(x,y)存在目标的概率可表示为
(5)
式中
(6)
设雷达观测空间长L,宽M,通过概率网格划分法[12]将其离散化,如图2所示。方格尺寸为Δx×Δy,方格数量为NM×NL。根据高斯分布快速衰减特点,可认为量测点3σ区域外的概率为零[12],即只考虑图1阴影区域内方格的概率。可根据式(5)求得每个方格存在目标的概率为
(7)
式中 C为归一化常数,且
(8)
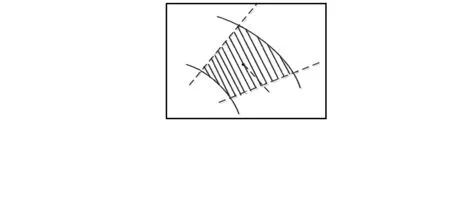
图2 目标存在区域网格Fig 2 Grids of target zone
设第i部雷达的第j个量测可表示为:zij={(rij,φij,tij,Iij)|i=1,…,N;j=1,…,mi} 。现在将概率网格与多维Hough变换,具体步骤如下:
1)对于量测zij,建立一个大小NM×NL的矩阵Bxy,P,ij,根据式(7)计算每个方格的概率,将它们保存在Bxy,P,ij中。
2)将Bxy,P,ij的所有行依次相加,并将结果保存在矩阵Bxt,P,ij中,同时设集合Sxt={(xijk,tij,Pijk)|i=1,…,N;j=1,…,mi;k=1,…,NL}。其中,xijk和Pijk分别为Bxt,P,ij第k个方格中心的x坐标值和其储存的概率值。
3)若集合Sxt中任两个量测的坐标x和时间t均相等,则将它们合并,概率P相加,并将合并后Sxt中概率P=0的量测去除。设剩余的量测数为Nxt,则此时Sst={(xk,tkPk)|k=1,…,Nxt},Sxt即为x—t空间量测的概率分布。同理,可求得y—t空间量测的概率分布Syt={(yk,tk,Pk)|k=1,…,Nyt}。
4)将所有的Bxy,P,ij相加,可得x—y空间中存在目标的概率分布
(9)
式中 Bxy,P每个元素的数值等于x—y空间相应网格存在目标的概率。
5)取Bxy,P中存储概率不为零的方格X和Y坐标、概率值,构成x—y空间的量测概率分布Sxy={(xk,yk,Pk)|k=1,…,Nxy},Nxy为量测个数。
6)建立累加器A(ρ,θ),且所有元素预置为零。将Sxy中量测的位置信息(xk,yk)通过标准Hough变换在ρ—θ参数空间以概率信息进行累积
A(ρ,θ)=A(ρ,θ)+Pk
(10)
通过阈值T1筛选,可得一组(ρxy,θxy)。而T1=α·Amax(0<α≤0.6),其中,Amax为最大累计值。同理,可得参数对(ρxt,θxt),(ρyt,θyt)。
2.2 基于不敏变换的空间融合
空间融合就是将x—t和y—t空间的候选参数对(ρxt,θxt),(ρyt,θyt)与x—y空间的(ρxy,θxy)进行融合,以消除部分虚假轨迹,具体融合方法:
input:「(ρxt,θxt),(ρyt,θyt)
for所有的(ρxt,θxt),(ρyt,θyt)组合
利用式(11)将δ点转换到x—y空间
根据式(14)计算y的估计均值
利用式(15)计算y的估计差,作为门限
if任一个参数对(ρxt,θxt)在门限内
then将其作为候选航迹参数保存起来
end if
end for
假设x—t和y—t空间中的所有(ρxt,θxt)和(ρyt,θyt)均为正确值的带噪声状态。而根据式(11)可知上述三组参数对之间的衍生关系是高度非线性的,故本文利用不敏变换来计算(ρxt,θxt)和(ρyt,θyt) 融合后在x—y空间中产生的噪声参数
(11)

(12)
(13)
(14)
(15)

(16)


(17)
3 仿真分析
设观测空域为长100 km,宽100 km,雷达工作情况及目标运动状态分别见表1和表2。每次扫描杂波个数服从参数λ=30的柏松分布[14]。各雷达总扫描次数N=10,信噪比SNR=5 dB。
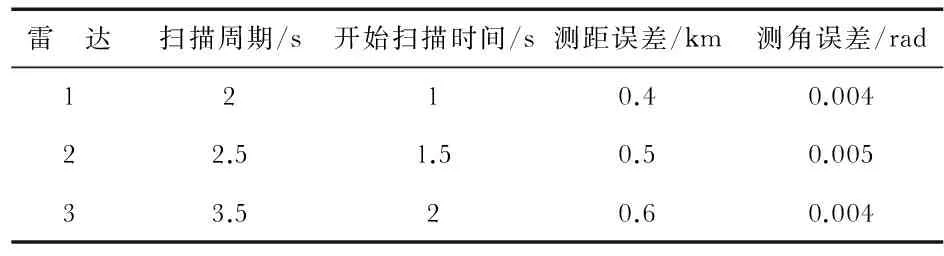
表1 雷达工作情况

表2 目标初始状态
图3给出了观测空域中目标和杂波分布图,其中圆圈表述三个目标的真实轨迹。
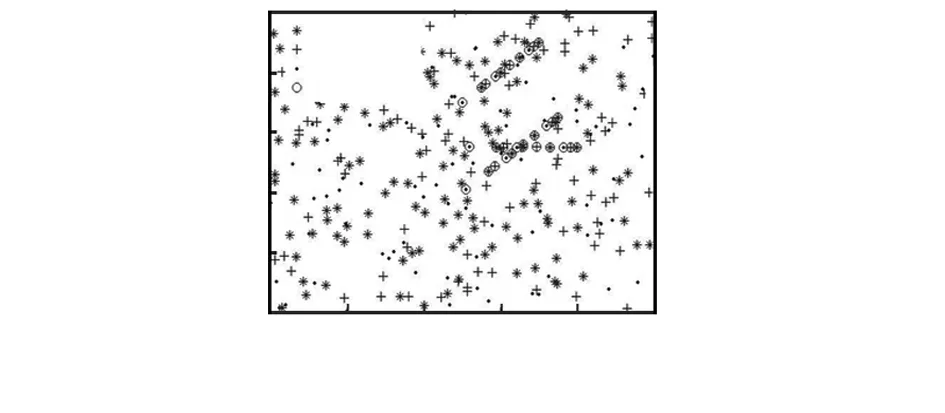
图3 目标和杂波分布图Fig 3 Distribution chart of targets and clutters
图4分别给出了文献[10]算法检测结果,本文算法x—y,x—t和y—t空间Hough检测结果以及三维空间融合检测结果。将图4(a)、4(b)和4(e)比较,图4(a)包含大量虚假航迹,甚至无法准确辨别目标的数目;图4(b)可辨别出目标数目,但仍存在较多虚假航迹;而图4(e)可准确显示目标数目,且仅在真实航迹附近有较少量的相似虚假航迹。因此,图4(e)在定位目标航迹和消除杂波方面均有较好效果。

图4 Hough变换航迹检测结果对比图Fig 4 Contrast diagram of track-detection results by Hough transform
为了更好验证本文算法的性能,将本文算法与文献[10]算法分别进行100次蒙特卡罗仿真,仿真结果见表3,其中,Pi表示航迹检测正确率,Pf表示虚假航迹占有率。
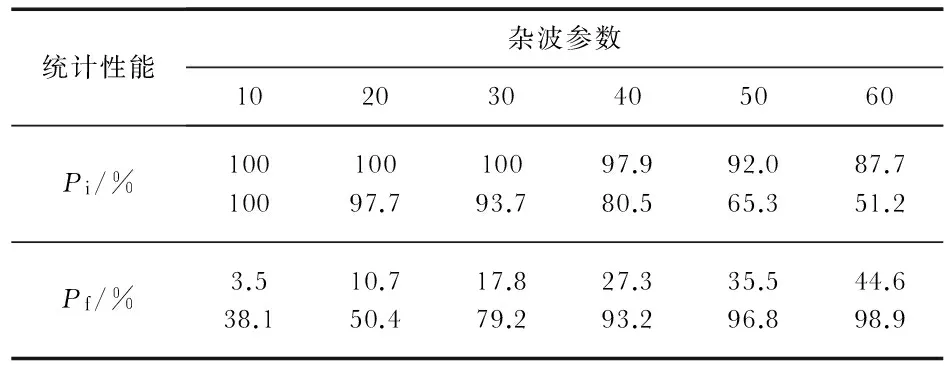
表3 蒙特卡罗仿真结果
由表3可以看出,两种方法的Pi值随着杂波数的增大而减小,Pf值随之增大。当λ>20时,文献[10]算法的Pf值迅速增大,无法实现目标的有效检测;而本文算法仍能保持较高的航迹检测正确率和较低的虚假航迹占有率,故本文算法的鲁棒性较强。
4 结 论
本文首先利用概率网格将雷达测量数据概率化,然后通过多维Hough变换在多维空间建立初步候选航迹,最后利用基于不敏变换的空间融合方法得到目标数目与轨迹。仿真结果表明:本文算法能够对临近空间目标进行有效检测,适合于不同精度异步工作的雷达网进行检测发现。
[1] 沈海军,程 凯,杨 莉.近空间飞行器[M].北京:航空工业出版社,2012.
[2] 李惠峰.高超声速飞行器制导与控制技术[M].北京:中国宇航出版社,2012.
[3] 罗小云,李 明,左 磊,等.基于动态规划的雷达微弱目标检测[J].系统工程与电子技术,2011,33(7):1491-1496.
[4] 张彦航,苏小红,马培军.密集杂波和未知数目条件下的多目标检测算法[J].信号处理,2010,26(11):1718-1724.
[5] Smith M C,Winter E M.Feature space transform for multi-target detection[C]∥Proc of the IEEE Conference on Decision and Control,1980:835-836.
[6] Wei L L,Zhang X L,Fan L.A TBD algorithm based on improved randomized Hough transform for dim target detection[C]∥Proc of the 2nd International Conference on Signal Processing Systems,2010:241-245.
[7] Gao C,Deng X B,Shi C H.Detection of dim maneuvering target based on randomized Hough transform[C]∥Proc of International Workshop on Information and Electronics Engineering,2012:808-813.
[8] Spak J,Moyer L R,Lamanna P.A multi-dimensional Hough Transform-based track-before-detect technique for detecting weak targets in strong clutter backgrounds[J].IEEE Transactions on Aerospace Electronic Systems,2011,47(4):3062-3068.
[9] Moqiseh A,Nayebi M M.3D Hough detector for surveillance radars[C]∥Proc of the Institute of Electronics,Information and Communication Engineers,2010:685-695.
[10] Kabakchiev C,Garvanov I,Doukovska L,et al.TBD netted radar system in presence of multi false alarms[C]∥Proc of the 6th European Radar Conference,2009:509-512.
[11] Kabakchiev C,Garvanov I,Doukovska L,et al.Data association algorithm in TBD multi-radar system[C]∥Proc of the International Radar Symposium,2007:521-525.
[12] 赵志超,饶 彬,王雪松,等.基于概率网格Hough变换的多雷达航迹其实算法[J].航空学报,2010,31(11):2209-2215.
[13] Huang D Y,Xue A K,Guo Y F.Penalty dynamic programming algorithm for dim targets detection in sensor systems[J].Sensors,2012,12(4):5028-5046.
[14] 何 友,修建娟,关 欣.雷达数据处理及应用[M].3版.北京:电子工业出版社,2013.
Track-before-detect algorithm for near space targets based on multi-radar
WANG Rui1, LIANG Zhi-bing1, WANG Jia-ming2, ZHANG Hao1
(1.Air and Missile Defense College,Air Force Engineering University,Xi’an 710051,China;2.Air Force Flying College,Xi’an 710037,China)
Aiming at problems that near space target is hard to detect and sampling period and measurement precision of multi-radars are different,a track-before-detect(TBD)algorithm for multi-radar based on probabilistic grid and multi-dimensional Hough transform is proposed.Firstly,radar measurement data are transformed into probability values by using probabilistic grid.Then,primary candidate tracks are set up in multi-dimensional space through multi-dimensional Hough transform.At last,the number and tracks of the targets are confirmed by space-fusion method based on unscented transform. Simulation results show that this algorithm can realize effective for detection of dim targets under dense clutter environment.
near space target; multi-radar; probabilistic grid; unscented transform; multi-dimensional Hough transform; track-before-detect(TBD)
2015—11—20
10.13873/J.1000—9787(2016)10—0116—04
TN 957
A
1000—9787(2016)10—0116—04
王 睿(1964-),女,陕西西安人,副教授,主要从事弱小目标检测及跟踪方向研究。
猜你喜欢
科学与信息化(2021年30期)2021-12-24
青年歌声(2019年12期)2019-12-17
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
火控雷达技术(2016年3期)2016-02-06
西北工业大学学报(2015年3期)2015-12-14
百科探秘·航空航天(2015年4期)2015-11-07
遥测遥控(2015年2期)2015-04-23
