模块化电子气动工业机器人系统设计
2016-11-14 05:50敏张兴国
食品与机械 2016年9期
钱 敏张兴国
(1. 南通工贸技师学院,江苏 南通 226010;2. 南通大学机械工程学院,江苏 南通 226019)
模块化电子气动工业机器人系统设计
钱 敏1张兴国2
(1. 南通工贸技师学院,江苏 南通 226010;2. 南通大学机械工程学院,江苏 南通 226019)
基于电子气动技术与模块化组合式的设计思路,完成了一款用于物料搬运的电子气动机器人本体结构和控制系统设计。详细说明了机器人的本体结构,给出了采用模块化阀岛技术的气动系统原理图,阐述了基于PLC控制器的控制系统的软、硬件设计。设计完成的电子气动搬运机器人综合了圆柱坐标型和极(球)坐标型工业机器人的特点,能实现5个自由度运动。
工业机器人;电子气动技术;模块化组合式
工业机器人产业是中国智能制造领域的突破口和重要抓手,被誉为“制造业皇冠顶端的明珠”,其研发、制造、应用是衡量一个国家高端制造业水平和科技创新能力的重要标志[1]。在国外,工业机器人技术日趋成熟,已经成为一种标准设备被工业界广泛应用,相继形成了一批具有影响力的、著名的工业机器人公司[2],包括瑞典的ABB Robotics,日本的FANUC、Yaskawa,德国的KUKA Roboter,美国的Adept Technology、American Robot、Emerson Industrial Automation、S-TRobotics,意大利COMAU,英国的AutoTechRobotics,加拿大的Jcd International Robotics,以色列的Robogroup Tek 公司等,其中,日本和欧盟的工业机器人技术最为先进[3]。随着中国制造业的蓬勃发展,特别是智能制造时代的到来,高性能低成本工业机器人系统研究将成为中国工业机器人技术研究和产业发展的重点[4-5]。中国工业机器人的研究起步较晚,尽管在某些关键技术上有所突破,但仍缺乏整体核心技术的突破,特别是在制造工艺与整套装备方面,缺乏高精密、高速与高效的减速机、伺服电动机、控制器等关键部件。其中,模块化可重构的工业机器人新型机构设计是中国工业机器人实现突破的核心关键技术之一[3]。
搬运机器人是工业化生产中的重要装备,可代替人工完成物料一定范围内的装卸、移动等工作,其应用可以有效降低劳动强度,提高搬运效率,降低人工成本。由于工业应用场合不同,搬运机器人的功能需求不一,结构也千差万别,因此,搬运机器人的设计与生产大多采用定制化生产方式,设计和生产成本较高。如何简化搬运机器人结构设计,扩大结构适用性,从而提高机器人性价比和可靠性是现代搬运机器人研究的重要方向。
本设计基于电子气动技术和模块化组合式设计思想,设计了一款电子气动搬运机器人的本体结构和控制系统,并验证了设计可行性。设计结果可以为搬运机器人,乃至工业机器人新型结构设计研究提供一定的理论和试验依据。
1 电子气动技术与模块化组合式设计
1.1 电子气动技术
气压传动作为机器人驱动的重要方式之一,具有介质安全、成本低、绿色环保等优点,但由于气体具有较大的可压缩性,使得气动元件的精确定位十分困难,是困扰气动技术在机器人领域应用的技术难题之一。随着微电子控制技术的发展,在原有的气动执行元件上安装一些电子元件或装置,可以极大地提高系统运行的精准度和可靠性,是机电一体化技术的深入发展,也是气动技术发展的必然趋势。
1.2 模块化组合式设计
由于不同领域的需求,机器人产品正朝着多品种、多规格、小批量、复杂化等方向发展。若仍采用传统的“一个用户需求、一次重新设计”的设计方法,就很难满足这些要求。模块化组合式设计思想[6-8]是以成组技术为基础,针对工业机器人生产领域小批量、多品种的需求,面向作业任务,综合运用目前已有的各种先进技术,选用优良品质的各组成模块(如执行元件模块、控制模块),将机器人按所需的功能和运动进行分解,然后将模块化执行机构和控制系统耦合集成,实现工业机器人的快速研制和重构。模块化设计方法与传统设计方法相比,不仅可以通过选择适当模块迅速构建客户所需机器人,而且还能很好解决机器人品种、规格与设计制造的周期、成本之间的矛盾,既可以兼顾使用上的专业性和结构上的通用性,又可以简化设计结构,缩短研制周期,提高产品设计的柔性和性价比。在这一领域进行深入研究,带来的生产快速、性价比高的工业机器人必将推动中国机器人产业及先进制造业的发展[9]。
2 电子气动搬运机器人结构设计
基于电子气动技术和模块化组合式设计思想,设计完成了一款电子气动搬运机器人,本体结构见图1。该电子气动搬运机器人综合了圆柱坐标型和极(球)坐标型工业机器人的特点,能实现5个自由度运动,分别是:体旋转1、体升降2、臂旋转3、臂伸缩4、腕旋转5。其中体旋转1、臂旋转3采用电驱动(步进电机),满足多工位精确定位需要;体升降2、臂伸缩4、腕旋转5采用气压驱动(气缸),完成工作范围内的移动和搬运任务;手爪部分采用指夹持气缸,通过更换不同指部元件实现不同物品夹持。
图2为该电子气动搬运机器人实物样机。
2.1 机械本体结构
2.1.1 机身 搬运机器人的机座与机身合成一体。机身的回转运动(体旋转)由步进电机驱动,通过同步齿形带传动。同步带传动具有传动准确、效率高、吸振好、平稳等优点,能够满足搬运机器人体旋转高精度的定位需求。
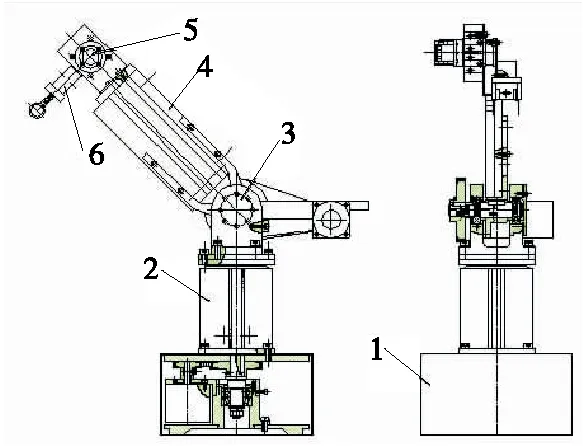
1. 体旋转 2. 体升降 3. 臂旋转 4. 臂伸缩 5. 腕旋转 6. 指夹持
图1 电子气动搬运机器人结构图
Figure 1 Structure diagram of electro-pneumatic transfer robot
1. 指夹持 2. 腕旋转 3. 臂伸缩 4. 臂旋转 5. 工件 6. 体升降
7. 阀岛 8. 体旋转 9. 工作台
图2 电子气动搬运机器人样机
Figure 2 Prototype of electro-pneumatic transfer robot
升降运动(体升降)采用SMC公司[10]的平台式导杆气缸,该款气缸具有安装高度小、承受偏心负载能力强、无需外设计导向装置、T槽结构便于安装附件等特点。升降运动气缸根据设计要求选定型号为MGF40-100。
2.1.2 手臂 搬运机器人通过臂部运动改变手部在空间的位置,臂部结构设计与运动形式、抓取重量、自由度、运动精度等因素有关,同时还需考虑到手臂受力情况、气缸及导向装置的布置、内部管路与手腕的连接形式等因素。结构设计采用模块化组合式设计思想,将臂旋转、臂伸缩的功能执行元件模块化,然后通过自行设计的连接板来组合实现。
手臂运动包括臂旋转、臂伸缩2个自由度,采用极坐标型运动方式。臂旋转采用“步进电机+同步齿形带”驱动。其中,步进电机置于手臂端部,一方面作为动力源,另一方面与臂伸缩部分构成力平衡,避免运动中各构件重力所引起的偏重力矩起伏过大影响机器人定位精度和性能;臂伸缩选用MXF20-100型直线气缸,具有高度小、内置磁环定行程、凸轮轴承摩擦小寿命长、调行程装置、方便安装等特点。
2.1.3 其它部分 腕旋转自由度主要实现搬运机器人指部的姿态变化,设计中采用MDSVB7型回转气缸,通过可调整限位块来满足指部的位置调整需要。
指夹持自由度主要完成对搬运物体的夹持、释放等动作。根据功能分析和计算,选用MHQZ-16D型标准气动夹持气缸,并通过连接板安装于腕旋转的回转气缸上。
电子气动搬运机器人技术参数见表1。
2.2 气动系统
气动系统各执行元件采用选定的气缸,各气缸进气口、出气口装有出气节流式单向节流阀,便于执行元件的速度控制与调节。同时,气流的控制有利于执行元件运动稳定性的改善。电磁阀安装采用先进的阀岛技术,把多个电磁阀采用总线结构集成在一起,缩小了体积,减少了控制线,便于安装、综合布线和控制,结构紧凑、简化。图3为搬运机器人的气动系统原理图。
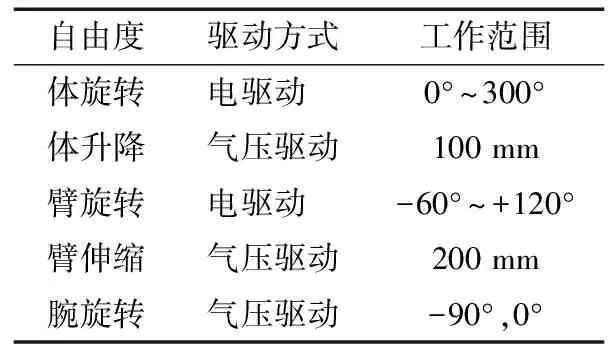
表1 电子气动搬运机器人技术参数
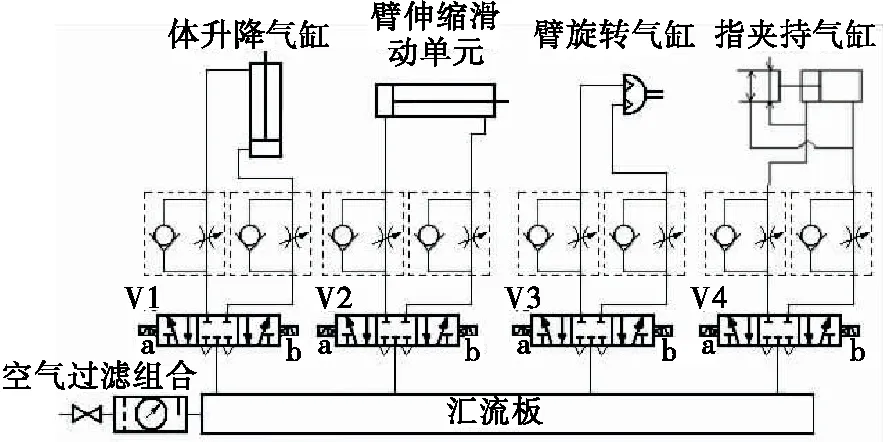
图3 电子气动搬运机器人气动系统原理图
3 电子气动搬运机器人控制系统
3.1 控制系统硬件
控制系统选用三菱公司的PLC控制器作为控制核心,并扩展2个脉冲输出模块用于电机运动控制。PLC控制器根据控制点数需要选型为FX2N-64MR,FX2N系列PLC具有运算速度快、存储容量大、抗干扰能力强等优点,既可处理数字量信号,通过扩展还可处理模拟量信号和定位控制;扩展模块选用FX2N-1PG分别控制2个体旋转、臂旋转步进电机。步进电机的静态锁紧力矩可以满足确保机器人工作稳定性。控制系统构成框图见图4。
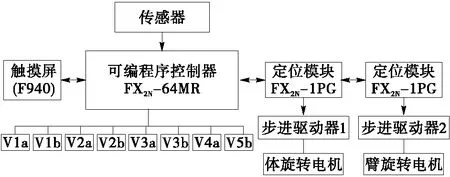
图4 控制系统构成框图
3.2 控制系统软件
搬运机器人系统控制主要实现系统初始化、返回原点、手动操作、自动运行、故障检测及报警等功能。程序编制采用三菱公司PLC编程软件完成。
系统初始化主要包括运行状态初始化和电机运动控制参数初始化两部分。运行状态初始化通过功能指令IST对步进梯形图中的状态初始化和一些特殊辅助继电器进行自动切换控制,包括返回原点操作、手动操作控制和自动循环控制等;电机运动控制参数初始化主要是通过设定BFM数据缓冲器参数来初始化定位模块FX2N-1PG的工作参数,包括控制参数设定、常用输入控制和软控制位等,如运行速度、爬行速度、加减速时间、回参考点开关信号、返回原点等。返回原点是指机器人各执行机构全部自动复位到原点状态,所有动作执行完成到位后,原点标志置位,为自动运行做准备。手动操作主要实现单个执行机构单独运转或同时运转,用于调试设备或工作状态的调整。自动运行可以实现各执行机构的连续、循环和协同工作。当原点条件满足后,在自动运行模式下按下启动信号,将自动完成程序预定的搬运过程。除急停情况外,程序只有完成一个完整动作流程后才会停止运行,同时设定了运行状态断电保持功能。若原点条件不满足,自动运行模式将不能启动。故障检测及报警功能主要用于搬运机器人运行状态下的自检和故障报警功能,实时对设备运行状态、故障信息和系统变化进行检测,以便于工作人员了解设备运行状况以及对出现的故障采取有效应对措施。
4 结论
利用电子气动技术和模块化组合式设计思想完成了一款搬运工业机器人系统设计。所设计的电子气动工业机器人将微电子控制技术、气压传动技术和模块化设计思想有机结合,面对工业机器人中的执行单元相似部件进行模块化设计,通过适当调整参数或快速更换样机中可换件,实现系统重构,完成不同的功能需求。运用电子气动技术和模块化组合式设计思想设计的工业机器人与传统的专用机器人相比,具有柔性强、设计制造周期短、适应面宽、性价比高等优点。
[1] 王田苗, 陶永. 我国工业机器人技术现状与产业化发展战略[J]. 机械工程学报, 2014, 50(9): 1-13.
[2] 张效祖. 工业机器人的现状与发展趋势[J]. 世界制造技术与装备市场, 2004(5): 33-36.
[3] 王田苗, 陶永. 我国工业机器人技术现状与产业化发展战略[J]. 机械工程学报, 2014, 50(9): 1-13.
[4] 骆敏舟, 方健, 赵江海. 工业机器人的技术发展及其应用[J]. 机械设计与制造, 2015, 44(1): 1-4.
[5] 马光, 申桂英. 工业机器人的现状及发展趋势[J]. 组合机床与自动化加工技术, 2002(3): 48-51.
[6] 施进发, 梁锡冒. 机械模块学理论[J]. 中国机械工程, 1997, 8(6): 53-55.
[7] 侯亮, 唐任仲, 徐燕申. 产品模块化设计理论、技术与应用研究进展[J]. 机械工程学报, 2004, 40(1): 56-61.
[8] 张兴国,刘明. 工业机器人组合式模块化结构设计研究[J]. 制造业自动化, 2008(7): 30-32,74.
[9] 陈航, 殷国富, 赵伟, 等. 工业机器人模块化设计研究[J]. 机器人技术, 2009, 36(3): 56-58.
[10] SMC(中国)有限公司. 现代实用气动技术[M]. 3版. 北京: 机械工业出版社, 2008: 698-721.
A design of transfer robot based on electro-pneumatic controlling technologies
QIAN Min1ZHANGXing-guo2
(1.NanTongIndustryandTradeTechnicianCollege,Nantong,Jiangsu226010,China;2.SchoolofMechanicalEngineering,NantongUniversity,Nantong,Jiangsu226019,China)
A type of transfer robot was designed based on electro-pneumatic controlling technologies and module structure combination. Structure of the robot was explained in detail, and the corresponding draw for the working principle of the pneumatic system adopted valve island technology was analyzed. Furthermore, the control program and hardware of the control system were demonstrated. The electro- pneumatic transfer robot integrated the characteristics of cylindrical coordinates and polar (ball) coordinates, it can achieve 5 degrees of freedom movement.
industrial robot; electro-pneumatic controlling technology; modularization and combination
江苏省自然科学基金项目(编号:BK20131205)
钱敏,女,南通工贸技师学院高级讲师。
张兴国(1975-),男,南通大学机械工程学院副教授,硕士,硕士生导师。E-mail: zhangxingguo@163.com
2016—03—15
猜你喜欢
天然气与石油(2022年4期)2022-09-21
海洋信息技术与应用(2022年1期)2022-06-05
北京航空航天大学学报(2021年6期)2021-07-20
装备制造技术(2021年1期)2021-05-21
现代装饰(2020年5期)2020-05-30
模具制造(2019年4期)2019-06-24
测控技术(2018年9期)2018-11-25
中国核电(2017年2期)2017-08-11
流程工业(2017年4期)2017-06-21
科技创新导报(2016年9期)2016-05-14