
基于5.9 GHz实测数据的车-车无线信道特性研究*
2016-11-14 09:09李昌振于俊逸
武汉理工大学学报(交通科学与工程版) 2016年5期
李昌振 于俊逸 陈 伟 杨 堃
(武汉理工大学自动化学院1) 武汉 430070) (Super Radio AS2) 奥斯陆 1281)
基于5.9 GHz实测数据的车-车无线信道特性研究*
李昌振1)于俊逸1)陈 伟1)杨 堃2)
(武汉理工大学自动化学院1)武汉 430070) (Super Radio AS2)奥斯陆 1281)
车-车无线通信信道参数经常随时间变化,并且快速的变化也会影响无线信道的特征.针对车-车无线信道的特点,为了准确分析和研究相关信道特征,利用5.9 GHz频段的高精度无线信道测量仪对该无线信道的进行了场景测量.对实测数据的时延域、频域参数进行了精确提取,并分别对其功率时延谱、时延扩展、时延多普勒谱等信道参数进行了详细描述.分析数据表明,该信道90%的平均时延 (Mean-delay) 集中分布在940 ns以内,90%的均方根时延扩展(RMS-delay) 分布在1 800 ns以内;同时信道估计出有48 Hz的最大多普勒频移,与实际情况相吻合.通过分析,发现整个测量活动过程中最大多普勒频移的分布情况与实际测量路线吻合.
无线信道;V2V;时延扩展;多普勒频移
0 引 言
车-车(vehicle to vehicle,V2V) 无线通信通过建立车与车、车与地面设备之间的特有通信网络,实现其车载之间的数据共享和传递,可以更大程度上提高地面交通效率、保障交通安全.
现有研究结果表明,V2V无线通信的发射端 (TX)、接收端(RX)在大多数情况下处于较快的移动状态且基本位于同一高度,故而不同于传统的蜂窝通信[1-3],需要对其进行专门的研究与分析.文献[2]在射线跟踪技术和场景测试的基础上,对5.6 GHz频段城区十字路口环境的V2V信道特征,如功率时延分布、信道增益等进行了研究;考虑到信道参数会随着环境的不同而发生变化,文献[3-4]分别针对郊区环境、城区环境、乡村环境和高速环境进行了信道建模;在文献[5]中,对5 GHz下反向高速行驶车辆之间的信道路径损耗、功率时延谱、多普勒扩展等进行了分析;而文献[6-7]则给出了2.4 GHz频段同向行驶的车辆之间的信道描述.
为准确分析V2V信道的有关特性,测量场景设定在两辆同向行驶车辆之间,并针对802.11p标准下的5.9 GHz频段进行了无线信道测量,并对该场景下无线信道的功率时延分布、时延扩展、时延多普勒谱等参数进行了提取和研究.
1 测量活动描述
1.1 测量设备安装
车-车无线信道测量的2个移动端分别是一辆轿车和一辆货车.收、发射天线 (RX,TX) 分别置于2车的顶部,见图1.测量主要设备——无线信道测量仪 (channel sounder,CS) 由挪威Super Radio AS公司提供.该设备可用于测量无线信道的时域和空域的相关特性,并且可以用于精确测量信道特性,其工作的中心频率为5.9 GHz,发射带宽为100 MHz的Chirp 信号,每拍 (snapshot) 时间间隔:1 200 μs,其他各项参数设置见表1.
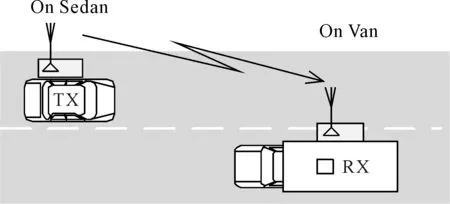
图1 基本测量结构
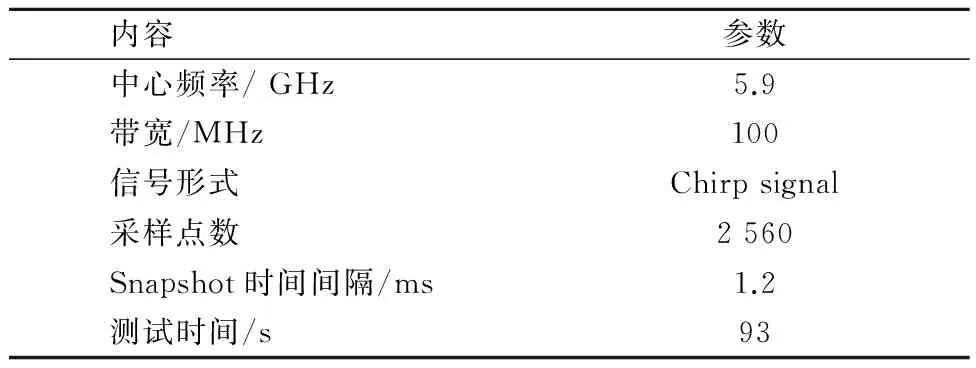
表1 测量设备参数设置
1.2 信号处理方法
根据CS的相关设计,测量数据是以大小为N×K的矩阵形式保存的.其中,N=833,为时间序列;K=2 560,为时延序列,即每1 s内接收到的Chirp信号数为833个,每个Chirp信号分别对应2 560个采样点.将测量数据经过傅里叶反变换可以得到复数形式的信道冲激响应 (CIR),文中用h(t,τ)表示.以信道冲激响应h(t,τ)为基本数据,对其在不同维度上进行计算,即可以获取到相应的信道特性值.
1.3 测量场景设计
测量活动在上海市嘉定区曹安公路24号桥 (121°10′57″ E,31°17′16″ N)附近进行.测量活动过程中2车以桥西为起点向桥东同向行驶 (车速为60~70 km/h).而桥梁两侧的建筑、旁边车道行驶的车辆,以及些许企业厂房则可视为反射的主要来源.
2 信道参数提取与研究
通过对数据进行预处理,结合测量场景、设备的相关信息,进而对5.9 GHz频段下车-车无线通信信道的功率时延分布、平均时延、均方根时延扩展和时延-多普勒谱等重要信道参数进行了估计与分析,计算和数据分析如下.
2.1 功率-时延分布
无线信道可以描述为冲激响应,而无线信道多数情况下是时变的,冲激响应h(t,τ)也会随时间的改变而发生变化.这很大程度上增加了信道分析与建模的难度.为了解决此类问题,Bello给出的广义平稳非相关散射 (WSSUS)模型(即散射体的不同时延之间不相关,散射体的不同多普勒频移之间也不相关[8])被专门用于描述像文中所涉及的频率非选择性信道.在该模型中可假定当移动单元所覆盖的距离小于载波信号的几十个波长时,信道处于“准平稳”状态[9].
参照WSSUS假设,信道的冲激响应h(t,τ)可以表述为
(1)
式中:ai为每个时延路径随时间变化的复系数;τi为第i个路径的时延.进而功率-时延谱 (见图2) 可由复冲激响应h(t,τ)变换得到
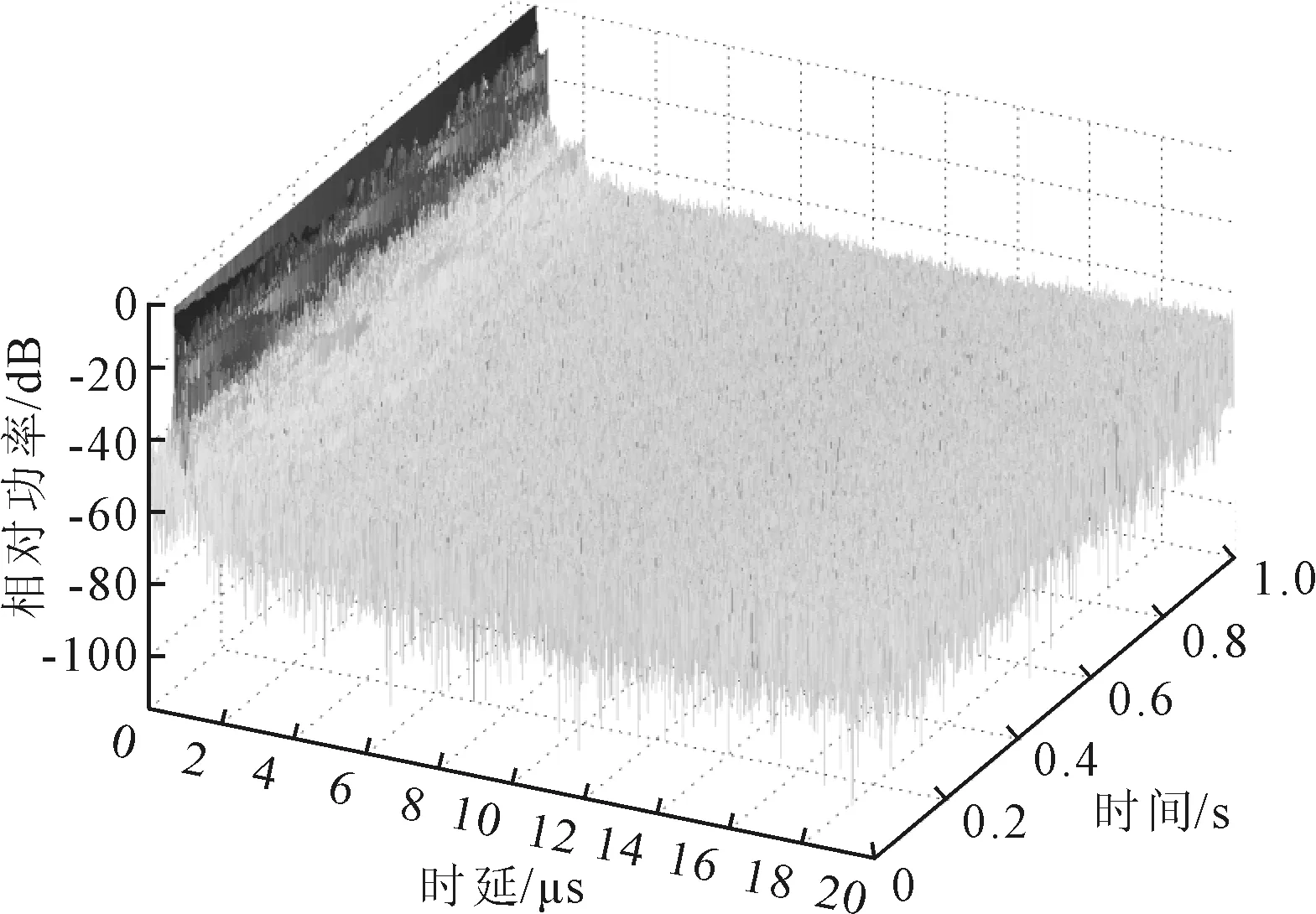
图2 功率-时延谱(归一化)
由式(2)可知,即使在广义平稳非相关散射(WSSUS)的假设条件下,功率-时延谱P(t,τ)仍然包含2个变量,对其的分析仍旧比较复杂.如要进一步减少变量、精简参数,最直接的方法就是对时间t内的功率时延分布进行均值求解,所得平均功率时延谱(见图3)为
(3)
式中:E{·}为平均算子.
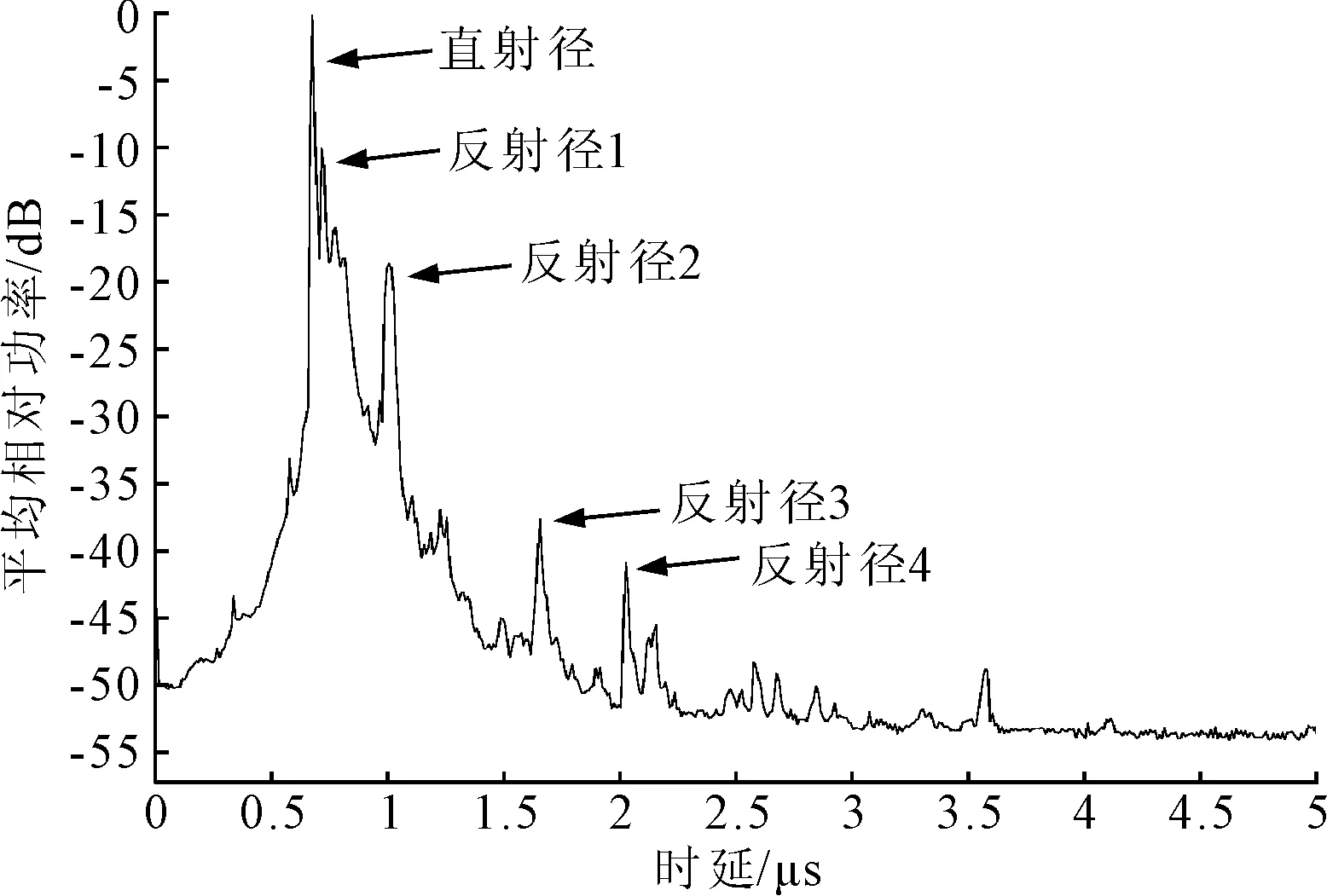
图3 平均功率-时延分布(归一化)
图2为测量过程中第85 s功率时延分布的计算结果.而此无线信道在这1 s时间段内的平均功率时延分布则由图3给出.该平均功率时延分布结果显示,信道的直射(LOS)径位于680 ns时延处,而在720 ns时延处,信号第一次出现了较为强烈的反射.根据计算可以得出,上述2径的路程差共有12 m.此外,结合测量场景描述中的相关信息,随后出现在不同时延处的大量“反射簇”,则可能是由于桥梁周围的障碍物和其他车道行驶的车辆所引起的.
2.2 平均时延和均方根时延扩展
时延扩展是一个与传播环境等因素密切相关的统计变量,是对多径信道时延特性的一种统计描述.大量的实验和研究结果表明,均方根时延扩展会对由时延色散引起的差错基底产生直接的影响.因此,对Mean-delay和RMS-delay的研究是十分必要的.
以2.1中的功率时延分布为基础,平均时延(归一化一阶矩)与均方根时延扩展 (归一化二阶中心矩) 的计算方法如下所示.
将式(3)中P(t,τ)在时间t上进行积分
(4)
平均时延可以表示为
(5)
均方根时延扩展为
(6)
在此基础上,通过选径、去噪(噪声门限为10 dB[10]),结合式(5)~(6)可得,该信道的平均时延、均方根时延扩展分别为:830、1 300 ns.图4~5分别描述了二者的概率密度分布(PDF)情况.
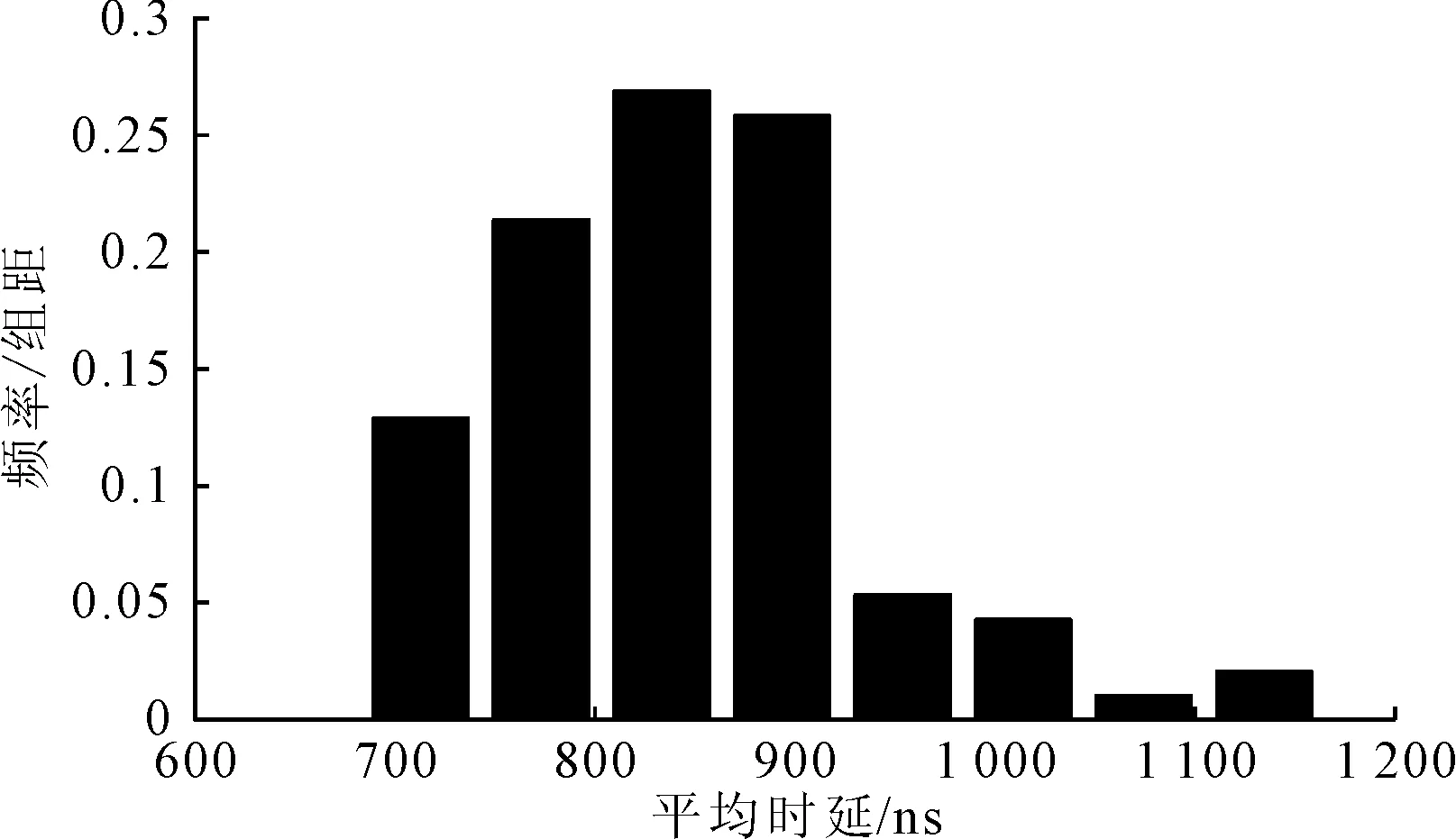
图4 平均时延概率密度分布
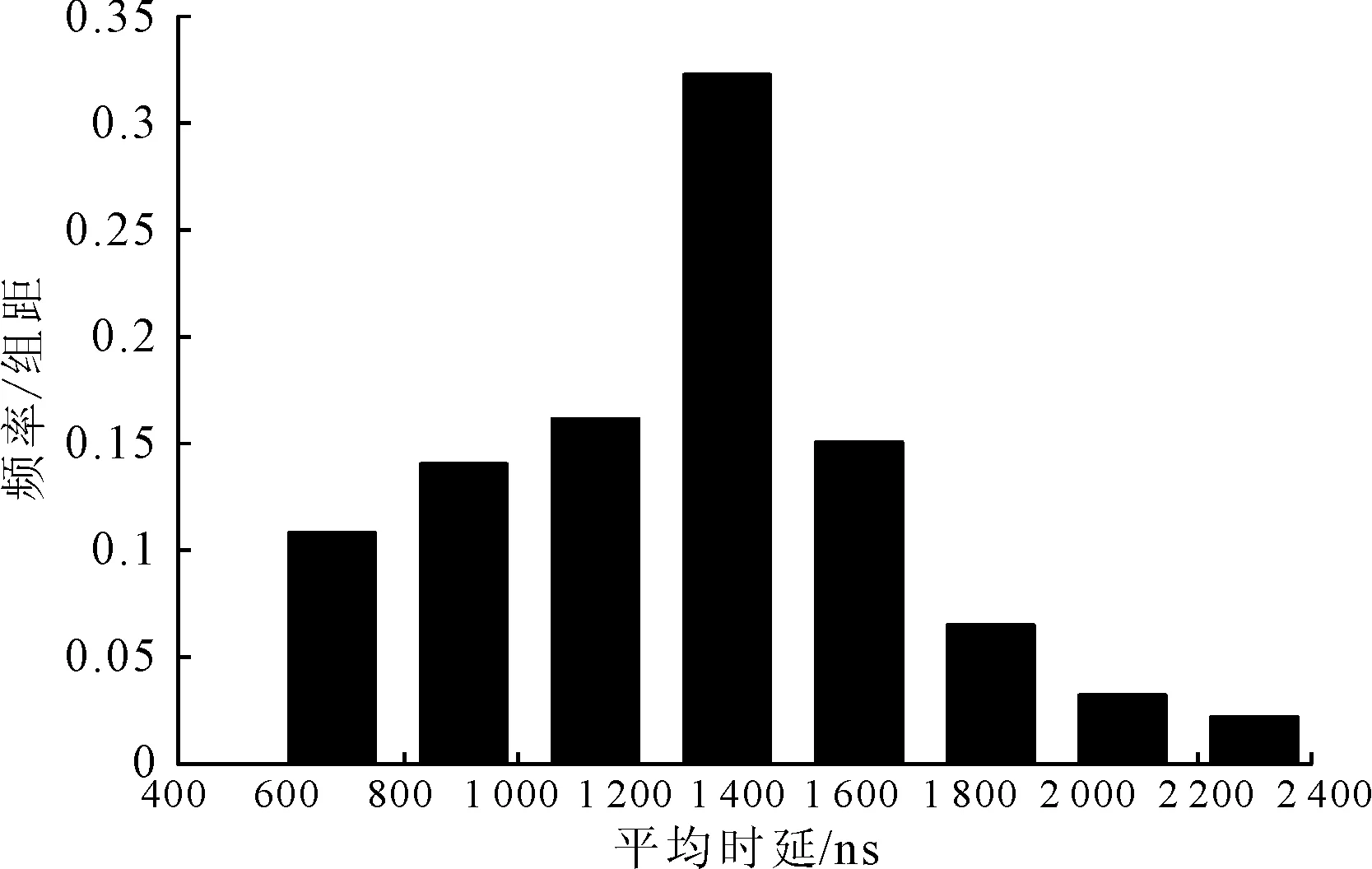
图5 均方根时延扩展概率密度分布
另一方面,由它们的累积概率分布函数 (CDF) ,见图6~7,可得其分布情况见表2.
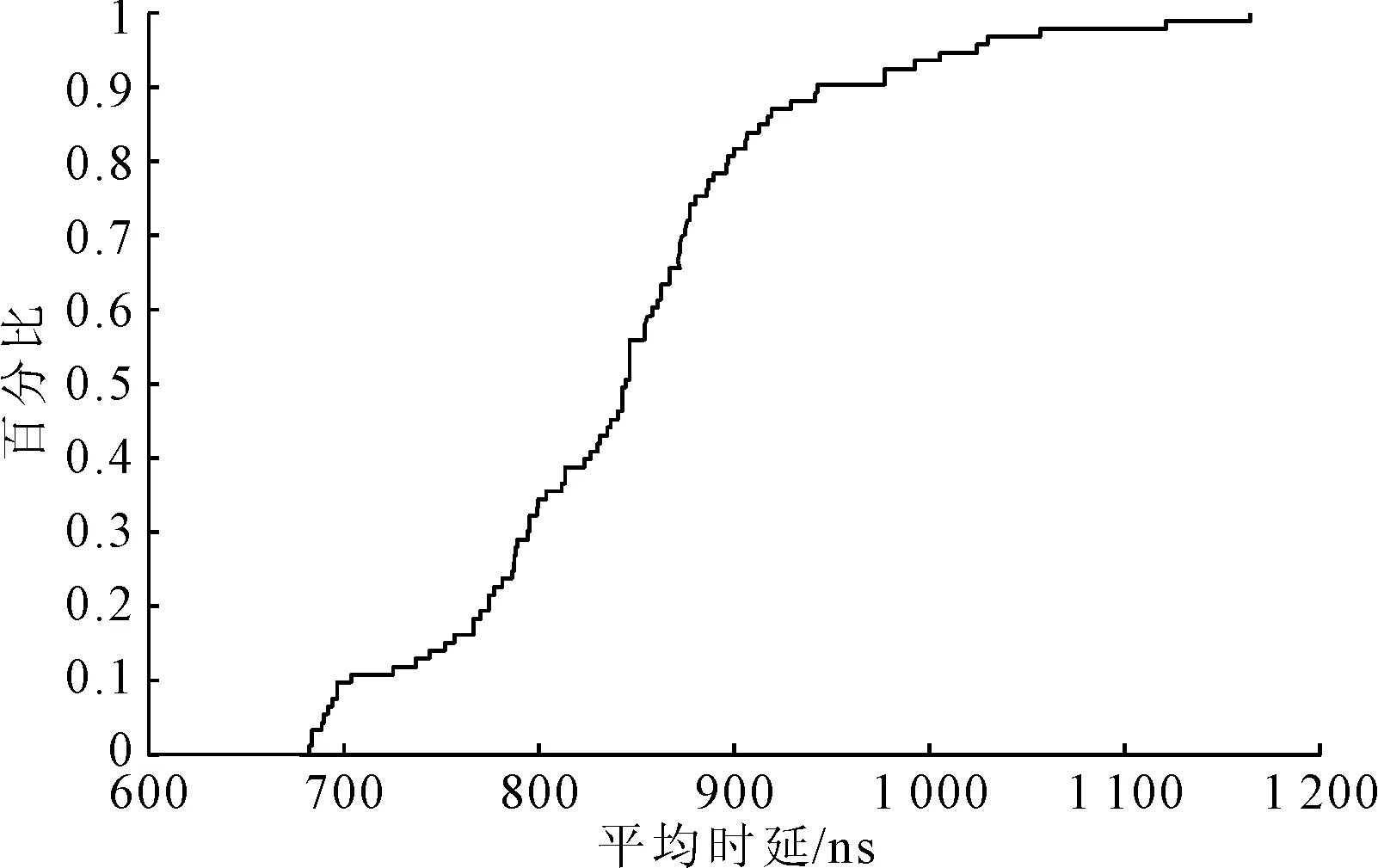
图6 平均时延累积概率分布
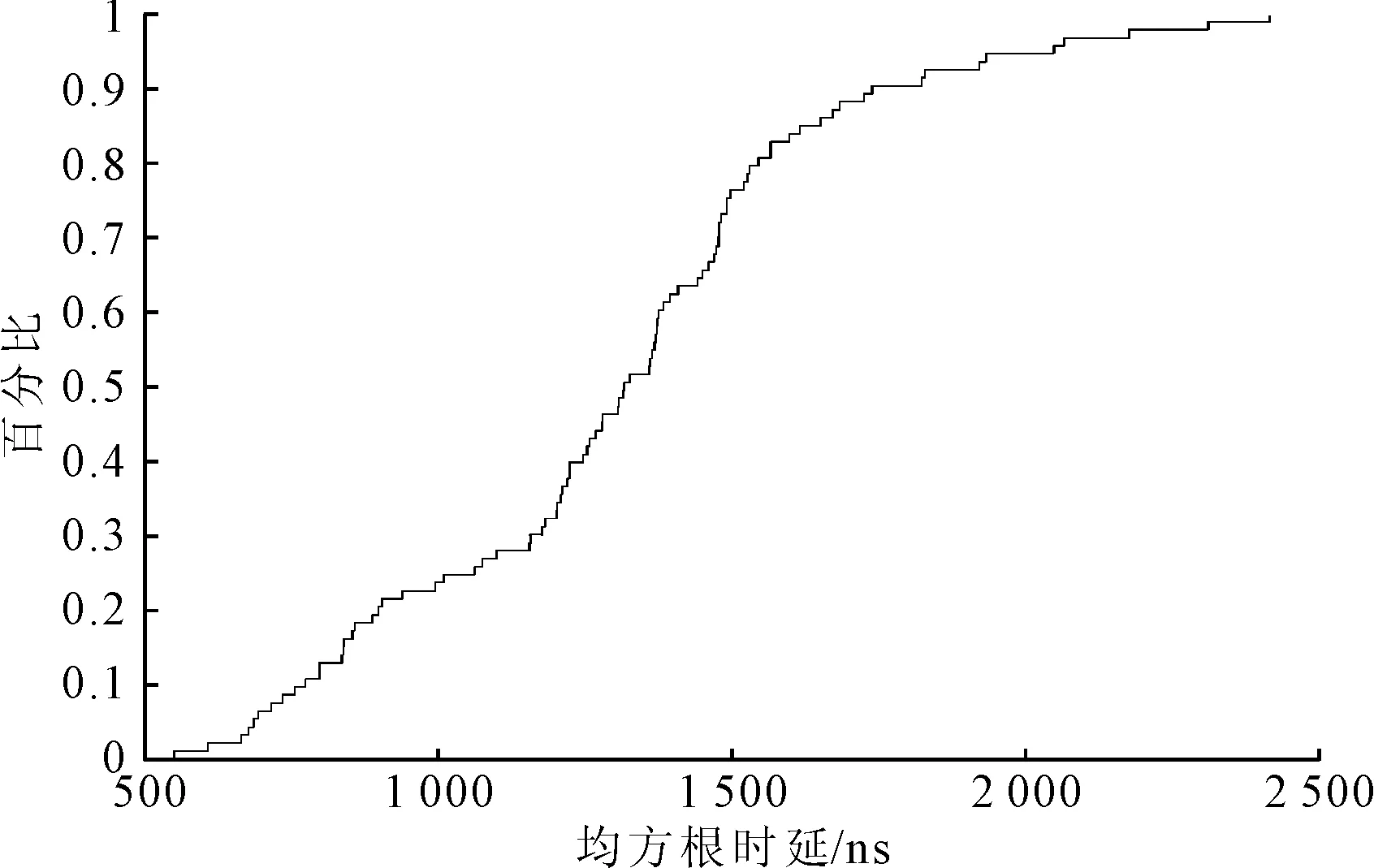
图7 均方根时延累积概率分布
2.3 多普勒频谱
多普勒频率是信道中可以度量其变化速率的一个重要参数.当发射端和接收端互相靠近时,多普勒频移为正值;相反,多普勒频移为负.然而由于移动端的速度远小于光速,因此多普勒频移数值很小,一般地,其典型值为1 Hz~1 kHz.
对复冲激响应h(t,τ)关于变量t进行傅里叶变换,可得到多普勒变化冲激响应为
(7)
式(7)中的函数描述了信号在时延和多普勒域的扩展.类似于功率时延谱的变换过程,时延多普勒谱可以通过多普勒变化冲激响应变换得到
(8)
图8给出了1 s时间段内测量数据的多普勒域分析.根据表1中的参数设置可知,该段时间内共包含有833个Chirp信号,多普勒谱的分辨率为:Δν= 1 Hz (频率范围:-416≤ν≤416 Hz).
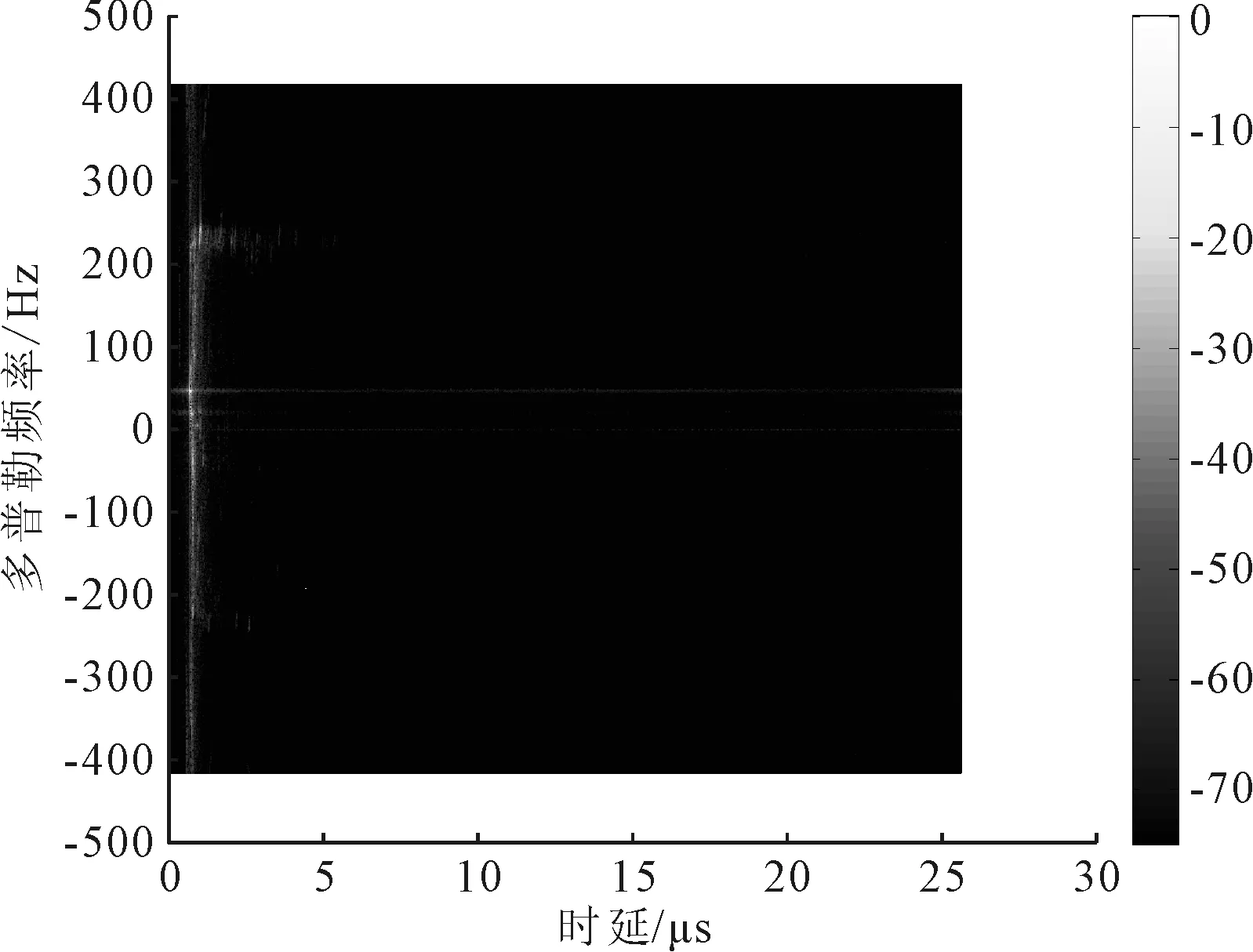
图8 1 s内时延-多普勒分布谱
图中能量值为归一化之后的结果,其最大值,即图中最亮点,位于680 ns时延处,对应多普勒频移为:48 Hz(即TX-RX之间的相对速度为2.44 m/s).而直射径以外的高亮区域,则是由于其他车道的车辆以及道旁障碍物反射带来的多普勒频移造成的.此外,“+48 Hz”的估计结果也很好的印证了测量过程中两车同向而行,后车速度稍微快于前车的这一事实.
为了更进一步地分析整个测量活动过程中多普勒频移的变化情况,图9展示了93 s的全部测量时间内最大多普勒频移的分布.测量活动开始后的一段时间,最大多普勒频移由负值向正值变化,而在此过程中由于前车处于转弯状态,其速度降低,两车正在靠近.同理,当后车处于转弯状态时,两车远离,最大多普勒值由正变负,之后,两车恢复同向行驶,处于稳定状态.与图3所示的实际测量路线吻合.
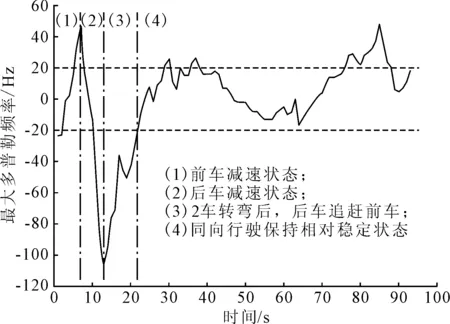
图9 测量过程中最大多普勒频移变化
3 结 束 语
文中对5.9 GHz车-车无线通信信道进行了信道测量,在WSSUS假设的前提条件下,由实测数据的时延域参数估计得:该信道90%的平均时延集中分布在940 ns以内,90%的均方根时延扩展分布在1 800 ns以内.此外,经过多普勒域分析,+48 Hz的多普勒频移表明,2车的相对位置正在接近,而这也与实际行车速度和环境相符合.
通过分析整个测量活动过程中最大多普勒频移的分布情况,其与实际测量路线也吻合.
[1]MOLISCH A, TUFVESSON F, KÅREDAL J, et al. A survey on vehicle-to-vehicle propagation channels[J]. IEEE Wireless Communications,2009,16(6):12-22.
[2]NUCKELT J, ABBAS T, TUFVESSON F, et al. Comparison of ray tracing and channel-sounder measurements for vehicular communications[C].Vehicular Technology Conference (VTC Spring), IEEE 77th, New York: IEEE,2013:1-5.
[3]ABBAS T, SJÖBERG K, KAREDAL J, et al. A measurement based shadow fading model for vehicle-to-vehicle network simulations[J]. International Journal of Antennas and Propagation,2015(2):190-195.
[4]KAREDAL J, CZINK N, PAIER A, et al. Path loss modeling for vehicle-to-vehicle communications[J]. Vehicular Technology, IEEE Transactions on,2011,60(1):323-328.
[5]PAIER A, KAREDAL J, CZINK N, et al. Car-to-car radio channel measurements at 5 GHz: pathloss, power-delay profile, and delay-Doppler spectrum[C].Wireless Communication Systems, ISWCS 4thInternational Symposium on,New York: IEEE,2007:224-228.
[6]ACOSTA G, TOKUDA K, INGRAM M A. Measured joint Doppler-delay power profiles for vehicle-to-vehicle communications at 2.4 GHz[C].Global Telecommunications Conference, GLOBECOM,New York: IEEE,2004(6):3813-3817.
[7]ACOSTA G, INGRAM M A. Model development for the wideband expressway vehicle-to-vehicle 2.4 GHz channel[C].Wireless Communications and Networking Conference,WCNC,New York: IEEE,2006(3):1283-1288.
[8]MOLISCH A,田斌,帖翊,等.无线通信[M].北京:电子工业出版社,2015.
[9]PATZOLD M,陈伟.移动衰落信道[M].北京:电子工业出版社,2009.
[10]GHASSEMZADEH S S, JANA R, RICE C W, et al. Measurement and modeling of an ultra-wide bandwidth indoor channel[J]. Communications, IEEE Transactions on,2004,52(10):1786-1796.Measurement-based Study of Radio Channel Characterizations for V2V at 5.9 GHz
LI Changzhen1)YU Junyi1)CHEN Wei1)YANG Kun2)
(SchoolofAutomation,WuhanUniversityofTechnology,Wuhan430070,China)1)(SuperRadioAS,Oslo1281,Norway)2)
The vehicle-to-vehicle (V2V) wireless channel behaves with fast time-varying due to the high mobility of vehicle. Therefore, in order to study the V2V radio channel properties precisely, a measurement campaign for V2V scenarios at 5.9 GHz is carried out in Shanghai. By estimating the channel parameters from the channel measurement data, the channel parameters including power delay profile, delay spread, delay-Doppler spread are given in the paper, respectively. It is found that 90% of the mean delay is within 940ns, while 90% of the RMS delay spread is within 1800ns. 48 Hz Doppler frequency shift is found in our measurement results, which matches well with theoretical calculations. By analyzing of the maximum Doppler shifts in the entire course of the measurement campaign, their distributions are found to be consistent with the measurement route.
radio channel; V2V; delay spread; Doppler frequency shift
2016-08-16
*国家自然科学基金项目资助(51268051)
TN92 doi:10.3963/j.issn.2095-3844.2016.05.026
李昌振(1991- ):男,硕士生,主要研究领域为无线通信
猜你喜欢
飞天(2019年6期)2019-07-08
电子制作(2019年23期)2019-02-23
自动化学报(2017年2期)2017-04-04
电信科学(2016年11期)2016-11-23
系统工程与电子技术(2016年7期)2016-08-21
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年17期)2016-04-11
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
新高考·高二数学(2015年2期)2015-05-27
新高考·高二数学(2014年7期)2014-09-18
