卫星导航系统接收机原理与设计——之十(上)
2016-11-14 02:33刘天雄
卫星与网络 2016年10期
+ 刘天雄
卫星导航系统接收机原理与设计——之十(上)
+ 刘天雄
4 工作原理
4.1.1载波信号(Carrier signal)
4.2导航信号生成
4.3导航信号接收处理基本原则Principle
4.4数字信号处理数学模型Mathematical Model
4.5基带数字信号处理
4.6导航处理
卫星导航定位原理是卫星不间断地发送自身的星历参数和时间信息,用户机接收到这些信息后,求解用户三维位置坐标。应用处理模块提取信号处理通道的观测量(伪码测距值和载波相位测距值)以及导航电文(卫星轨道星历、卫星原子钟钟差、电离层延迟等信息),并由此解算出用户位置(Position)、速度(Velocity)和时间(Timing)。
一些导航接收机还需要处理一些辅助参数,例如:时间和频率传递(Time and frequency transfer)、静态和动态测量(Static and kinematic surveying)、大气电离层参数监测(Ionospheric parameters monitoring)、卫星导航系统差分参考(Differential GNSS reference stations )、卫星导航系统信号完好性监测(GNSS signal integrity monitoring),以满足特殊的科研用途。
卫星导航系统的基本原理是测量出已知位置的卫星和用户接收机之间的距离,接收机可以根据星历数据算出卫星发射电文时所处位置,然而,由于用户接收机时钟与卫星星载时钟不可能完全同步,所以除了求解用户的三维坐标x、y、z外,还要引进卫星与接收机之间的时间差作为未知数,当接收机分别测量出与四颗以上卫星之间的距离时,就能建立含有4 个伪距方程方程组,并由此解算出解算出用户所在的位置坐标和系统时间。简要说明如下:
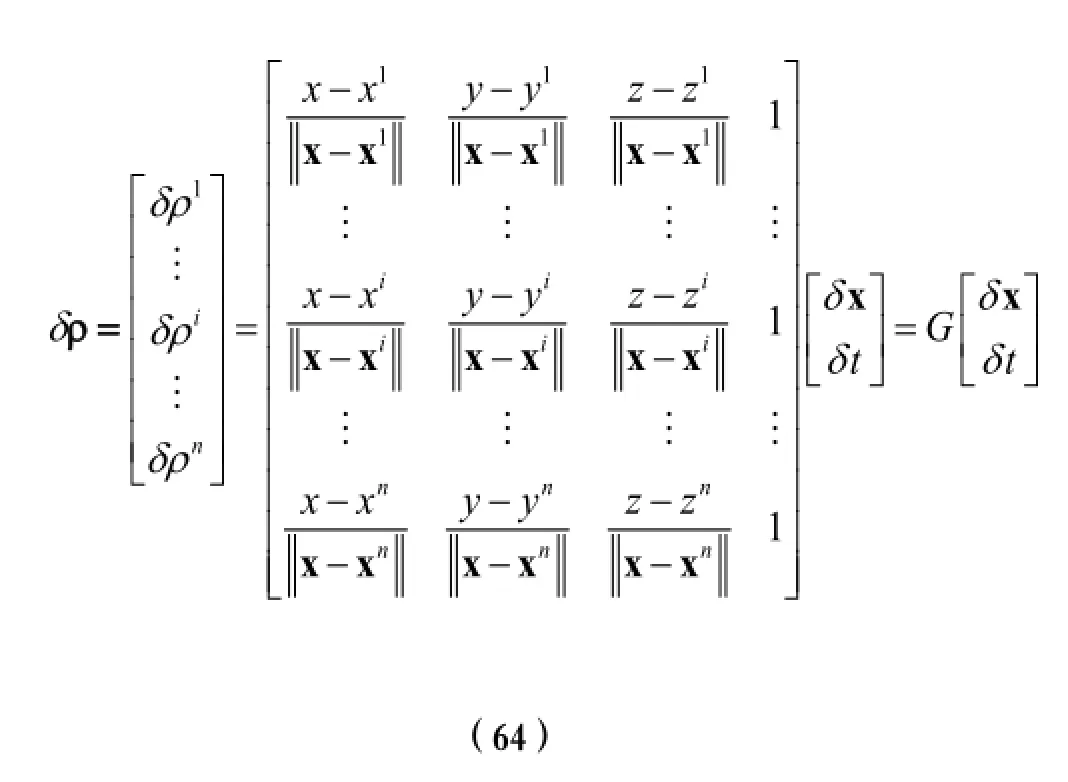
(1)伪距方程转化
(2)迭代最小二乘法(ILS)


④ 泰勒级数展开,可得,

因此伪距误差与初始值误差的关系方程组为,
(3)伪距修正
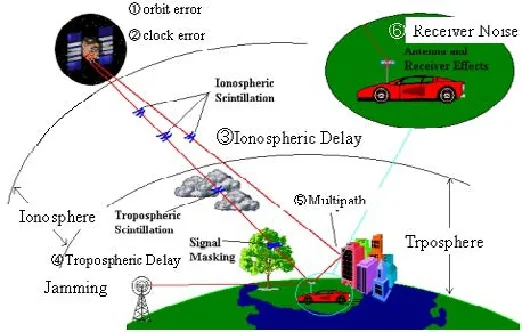
图59 距离测量中的各种误差
距离测量中包含有卫星和接收机的钟差、电离层传播延迟、对流层传播延迟等误差,如图59所示,在定位计算时还要受到卫星广播星历误差的影响,因此必须对伪距观测量进行修正。
卫星装有原子钟,控制星上所有的时间和频率工作。虽然这些时钟非常稳定,但是导航电文中的时钟校正参数被限定为卫星时和系统时之间的偏差最大可能达到1ms(相当于300km的伪距误差)。主控站确定时钟校正参数,并发给卫星,以便用导航电文转播出来。这些校正参数由接收机用二阶多项式来实现:

·电离层传播延迟补偿
电离层是一种色散介质,它位于地球表面以上70~1000km 之间的大气层区域。在这个区域内,太阳紫外线使部分气体分子电离化,并释放出自由电子。这些自由电子会影响电磁波的传播,其中包括GPS卫星信号的广播。电离层延迟的多少与卫星的仰角有关,视界内的卫星在低仰角时引起的延迟几乎等于在天顶时的3 倍。对垂直入射的信号来说,延迟的范围从夜间的10ns(3m)左右大到白天时的50ns(15m)。在低卫星视角(0~10)时,延迟的范围可从夜间的30ns(9m)大到白天的150ns(45m)。要消除该误差,既可以采取相对定位或差分定位的方法,也可以采用模型改正的方法。
1986年,美国学者Klobuchar对GPS信号在电离层的影响开展了全面的论述,1987年建立了Klobuchar电离层模型,Klobuchar电离层模型是在经验数据的基础上形成的,模型参数由导航电文提供。模型受到参数使用个数(最多8个)和更新频率的限制,广播模型可以将电离层造成的测量误差减少50%,在中纬度地区,天顶方向上的剩余误差白天可以达到10m,如果在太阳活动频繁期这种误差会更大。
·对流层误差补偿
对流层是大气层较低的部分,对于直到高达15GHz 的频率来说它是非色散的。在这种介质中,与L1 和L2 上GPS 载波的信号信息(PRN 码和导航数据)相关联的相速和群速,都相对自由空间传播被同等地延迟了。这种延迟随对流层折射率而变,而其折射率取决于当地的温度、压力和相对湿度。如果不补偿,这种延迟的等效距离能从卫星在天顶和用户在海平面上的2.4m 左右变到卫星在约5°仰角上的25m 左右。对流层延迟误差的常用模型为Hopfield 模型,建模补偿如下:
标准大气状况条件下:
(1). 标准海平面的热力学温度T0 = 15 Cel
(2). 标准大气压 Pair = 101.325 kPa
(3). 表混海平面水蒸气分压力 Pvap = 0.85 kPa(相对空气湿度50%)
Hopfield 模型将对流层误差分为两个分量:分别为干燥空气造成的和湿空气造成的误差。按照上述参数计算可分别获得干燥空气和湿空气造成的误差,进而获得对流程误差。
综上所述,需要修正的参数包括:群延迟Tgd(sec)、卫星参考时间Toc(sec)、原子钟零阶多项式系数af0(sec)、一阶多项式系数af1(sec/sec)和二阶多项式系数af2(sec/sec2)。
猜你喜欢
地理空间信息(2022年10期)2022-10-31
现代测绘(2022年3期)2022-07-23
空间科学学报(2021年4期)2021-08-30
区域治理(2021年14期)2021-08-11
空间科学学报(2021年2期)2021-07-21
中国农业文摘·农业工程(2020年4期)2020-07-24
中国农业文摘-农业工程(2020年4期)2020-07-17
雷达学报(2017年6期)2017-03-26
测绘通报(2016年12期)2017-01-06
载人航天(2016年4期)2016-12-01