
青居电站测圆架误差分析
2016-11-11 07:12:24安彬
水电站机电技术 2016年7期
安彬
(四川宝珠寺水力发电厂,四川 广元 628003)
青居电站测圆架误差分析
安彬
(四川宝珠寺水力发电厂,四川 广元 628003)
根据青居电站定转子测圆方法,逐步分析、计算测圆架安装、调整、测量过程中的误差。计算结果表明该测圆架满足检修期间对定转子测圆精度要求。
测圆架;定转子;误差;青居电站
青居电站4×34 MW灯泡贯流式机组系富春江富士水电设备有限公司设计制造。发电机型号SFWG34-64/6700,转子外径φ6 169 mm,磁极铁芯高度1 583 mm,转子磁极64块,定子外径φ7 300,内径φ6 190 mm,定子铁芯高度1 528 mm,设计空气间隙10.5 mm。
检修过程中发现发电机定子在拆装、起吊、翻身过程中存在变形现象,导致定转子空气间隙不均匀,产生不平衡的磁拉力。机组旋转时气隙大小及不平衡磁拉力随机组旋转周期性变化,造成机组振动、导轴承及受油器浮动瓦磨损加剧,影响机组安全稳定运行。
1 定子变形分析
图1为定子吊装示意图,从图中可以得出定子在起吊过程中受到横向的挤压,翻身过程中承受弯曲应力。
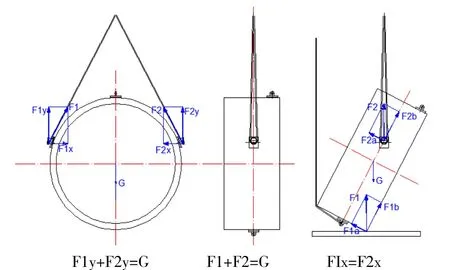
图1 定子吊装示意图
2 定转子测圆架
测圆架内安装重块,通过在测量杆反端加配重块平衡重量,使测量杆绕轴旋转时无沿轴向位移,保证定转子测圆时测点保证在同一水平面内(测圆架水平合格)。测圆架如图2。
3 测量误差分析(只考虑人为操作误差)
3.1 定转子水平误差
用框式水平仪调整定转子水平不大于0.02mm/m。
3.2 测圆架水平误差
测圆架水平亦是中心柱垂直度,既可用框式水平仪旋转测量法测量,也可在900方向挂二根钢琴线找正,水平度及垂直度应不大于0.02 mm/m。中心架转臂重复测量圆周上任意点的误差不大于0.02mm,每旋转一周测头上下跳动不大于0.5 mm。
调整方法:
1)通过调整底座顶起螺杆分方位调整或可用千斤顶强迫机座受力变形或基础板加垫。
2)调整的同时应在选定部位装设互成90°的4块百分表监示底座的抬升量。
3)水平与垂直的调整根据测量结果,综合分析,先主后次,相互兼顾,相互验证。
3.3 测圆架中心误差
通过千斤顶调整测圆架的中心,要求中心偏差在0.05 mm以内。调整的同时应在选定部位装设互成90°的4块百分表监示位移值,但最终以定子中心测定数据为准。
3.4 测圆架转动角度误差
定子圆度要求测量上、中、下3个断面,每个断面32个点,架设百分表直接读数,故不考虑转动角度误差。
转子圆度及垂直度测量要求每个磁极上、中、下端各设置一个测点,各测点位于同一水平断面,测点面积为2×2 cm2。测圆架在360°范围内应均分64份。
4 定子测圆累积误差
4.1 定子水平误差计算
定子中心以下法兰中心为准,设定子水平值a;定子半径r,测点与定子下法兰面距离为L,具体误差如图3所示:
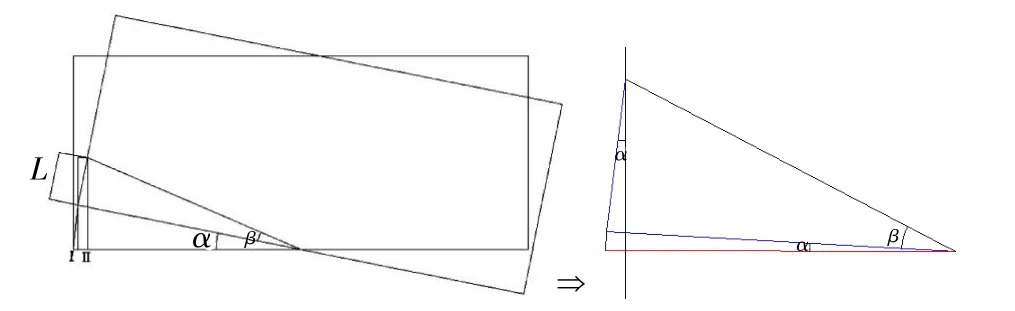
图3 定子水平误差示意图
由图3可得:

误差值I=r×a2误差值II=sinα×l
误差值=误差值I+误差值II=r×a2+l×sinα
+Y方向的误差值=cosα×(r×a2+l×sinα)
N点位的误差值=(r×a2+l×sinα)×cos[α+(n-1)×11.25°]
a≤0.02 mm/m,l≤3 000 mm,r=3 650 mm
N点位的误差值MAX=0.0015 mm
4.2 测圆架水平误差计算
设定测圆架水平值b,与+Y方向成δ角度(见图4);
利用相似三角形原理得出:
b×r/r=误差值/b×r Þ误差值=b2×r
+Y方向的误差值=b2×r×cosδ
N点位的误差值=b2×r×cos[δ+(n-1)×11.25°]
水平值b≤0.02 mm/m
N点位的误差值MAX=0.0015 mm
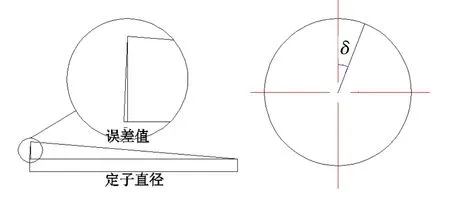
图4 测圆架水平误差示意图
4.3 测圆架与定子中心误差
设定测圆架与定子中心误差c,与+X方向成ε角度,则:
+Y方向的误差值=c×cosε
N点位的误差值=c×cos[ε+(n-1)×11.25°]
中心误差≤0.05 mm
N点位的误差值MAX=0.05 mm
4.4 定子测圆累积误差
综上所述误差累积在任一点位的误差最大值不超过0.053 mm,满足定子测圆精度要求。
5 转子测圆累积误差
5.1 转子水平误差计算(同4.1,略)
5.2 测圆架水平误差计算(同4.2,略)
5.3 测圆架与转子中心误差(同4.3,略)
5.4 测圆架转动角度误差计算
设定测圆架转动角度偏差n,测圆架臂长m(见图5)。

为了更直观的表示误差值,将角度误差设定为测圆架转动时测点在切线方向距离偏差l。

切线方向距离偏差l≤5 mm,测圆架臂长m-r设计在200~300 mm范围内。
N点位的误差值MAX=0.0625 mm
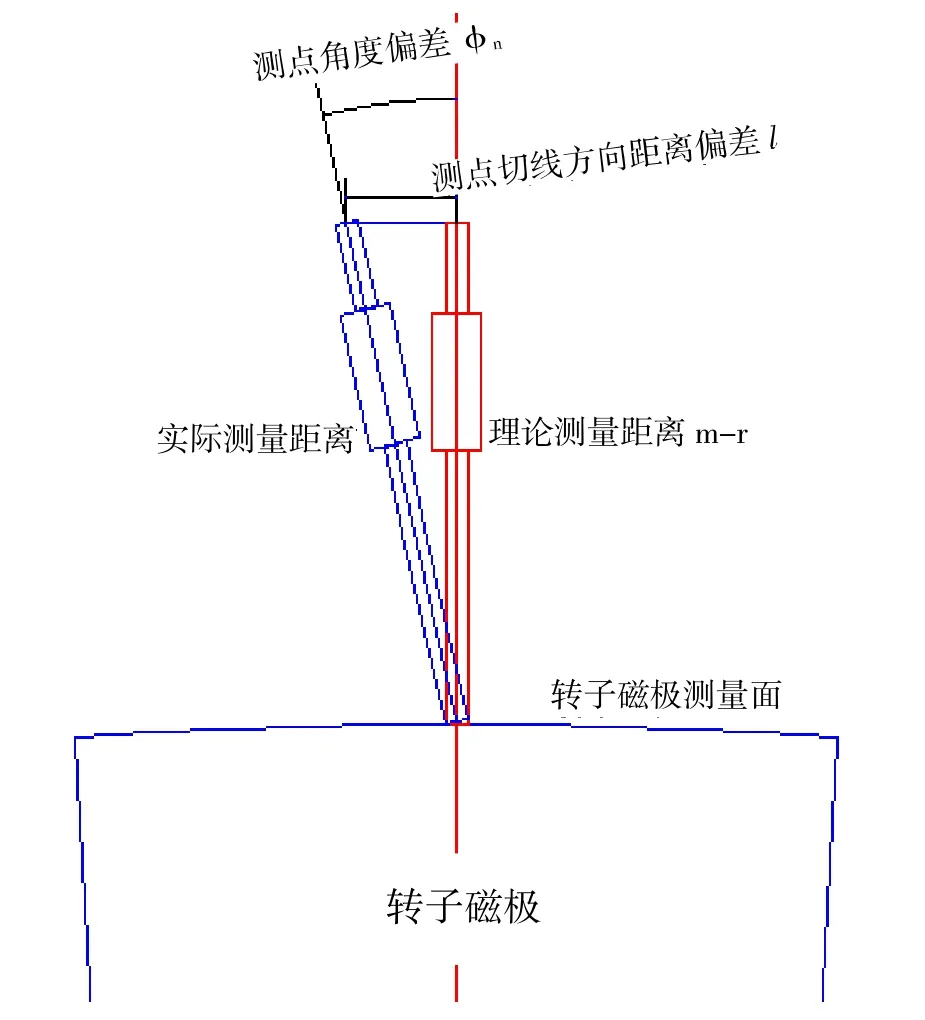
图5 测圆架转动角度误差示意图
5.5 转子测圆累积误差
转子测圆过程误差前3项和定子测圆误差计算方法一致,误差最大值为0.053 mm。转子测圆需架设钢琴线用内径千分尺测量,故存在转动角度定位误差。通过上述计算得出转动角度误差最大值约为0.062 mm,转子测圆总误差为0.115 mm。机组设计要求:转子磁极圆度要求各半径与平均半径之差不应大于设计空气间隙的±3%,即±0.315 mm。故此测圆架测量误差未超出转子测圆要求。
6 结论
通过对定子、转子测圆架累计误差的分析、计算,结果表明测圆架测量误差未超出测圆精度,满足测圆要求。
[1]杨文武,彭 伟,杨小华.脚基坪水电站发电机转子测圆架旋转中心体的设计、安装和调整[J].水电与新能源,2012(06).
[2]杨文武,黄立华,张 虎.改变测量条件对圆度误差的影响[J].新技术新工艺,2013(5):98-99.
[3]于兰阶.水轮发电机组的安装与检修[M].北京:中国水利水电出版社,1995.
[4]黄劲枝.机械设计基础[M].北京:机械工业出版社,2001.
[5]GB/T 8564-2003水轮发电机组安装技术规范[S].
TK730.6
B
1672-5387(2016)07-0057-03
10.13599/j.cnki.11-5130.2016.07.018
2016-03-30
安 彬(1989-),男,助理工程师,从事水力发电机组机械设备检修工作。
猜你喜欢
机械设计与制造(2023年2期)2023-02-27 12:40:16
作文小学高年级(2022年3期)2022-04-20 08:17:04
汽车实用技术(2021年10期)2021-06-04 07:51:00
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
福建中学数学(2018年1期)2018-11-29 02:52:14
37°女人(2017年8期)2017-08-12 11:20:48
滇池(2017年7期)2017-07-18 19:32:42
电机与控制应用(2015年10期)2015-03-01 03:50:16
水利水电科技进展(2014年1期)2014-10-17 02:29:14
