
SAFR-2000H调速器系统有功调整稳定性分析
2016-11-11 07:12:12刘广宇范进喜刘细辉
水电站机电技术 2016年7期
刘广宇,范进喜,刘细辉
(雅砻江流域水电开发有限公司官地水力发电厂,四川 凉山 615704)
SAFR-2000H调速器系统有功调整稳定性分析
刘广宇,范进喜,刘细辉
(雅砻江流域水电开发有限公司官地水力发电厂,四川 凉山 615704)
由调速器控制数学模型入手,结合一次调频及负荷调整性能分析,同时针对有功调整过程中发现的问题提出了优化建议,为机组有功调整稳定可靠设计提供了参考,对机组有功调整策略的优化有借鉴意义。
有功调整;开度模式;功率模式;稳定性
SAFR-2000H调速器控制系统采用奥地利B&R公司2005系列PCC组成不同控制结构、独立双通道,有功调整有开度和功率两种模式。开度模式是在监控系统上形成功率调节闭环,即监控系统设定有功功率后,电调接收监控系统开出脉冲,进行导叶调节,由监控系统根据功率反馈值进行闭环有功调节。功率模式是在调速器PCC控制系统上形成功率调节闭环,即调速器系统接收监控系统下发有功功率定值(模拟量),以自身功率变送器作为反馈量,进行导叶调节。
1 调速器控制数学模型分析
SAFR-2000H调速器控制系统具有频率调节模式、功率调节模式及开度调节模式,并依据不同工况自动选用。整个控制结构由主环及导叶副环组成,主环控制是变结构的控制机构,变换的原则是适应当时的运行工况和控制方式以获得最优的调节品质,导叶副环数字PID控制,使导叶闭环控制更精确,调速系统的动态响应、静特性指标、开度测量准确性更好。
SAFR-2000H调速器控制系统采用多级闭环、变结构变参数原理,转速调节主要采用改进型PID控制(见图1),系统振荡时叠加非线性鲁棒控制规律,以抑制电力系统振荡,增加电力系统阻尼。
SAFR-2000H系列水轮机调速器电气调节装置采用国网电力科学研究院研发的NARI-PID2控制算法,转速调节采用改进型PID控制,与经典PID相比,改进型PID有较大优点。经典PID结构永态转差率Bp取自PID综合输出部分,而改进型PID单取自积分I输出。
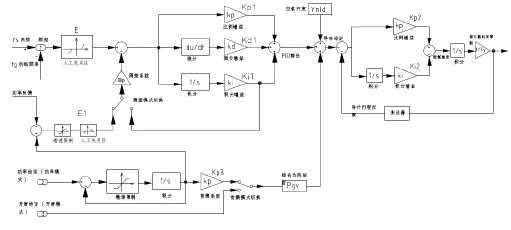
图1 调速器数学模型
经典PID控制传递函数为:

改进PID控制传递函数为:

通过比较上面两式,发现两者分子相同,但式(2)的分母比式(1)少一阶,即改进型PID控制比经典PID在传递函数上少一个极点,式(2)结构具有更好的动态调节性能,稳定域更宽。
2 一次调频性能分析
2.1 一次调频响应行为
在额定频率50 Hz基础上分别施加正负阶跃频率偏差信号(±0.10 Hz、±0.15 Hz、±0.20 Hz等),检验机组一次调频响应性能,具体试验结果见表1、2。
开度模式下,机组一次调频负荷响应滞后时间平均为2.5 s,机组一次调频负荷调整幅度达90%的时间平均为12.1 s,机组一次调频负荷稳定时间平均为21 s,功率模式下,机组一次调频负荷响应滞后时间平均为1.8s,机组一次调频负荷调整幅度达90%的时间平均为10.5 s,机组一次调频负荷稳定时间平均为25 s,均符合《水轮机调节系统并网运行技术导则》、《华中电网发电机组一次调频技术管理规定》要求。
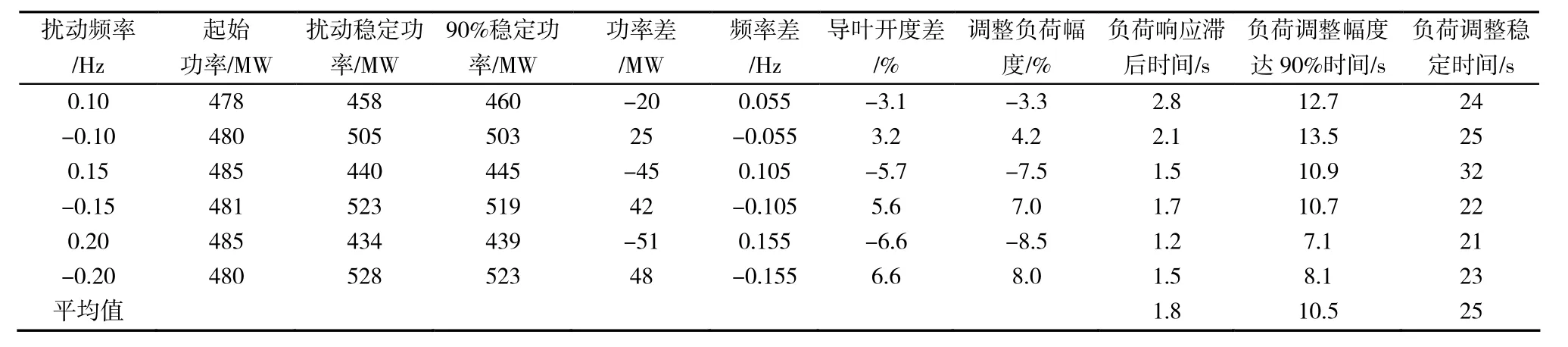
表1 开度模式下一次调频试验数据记录表
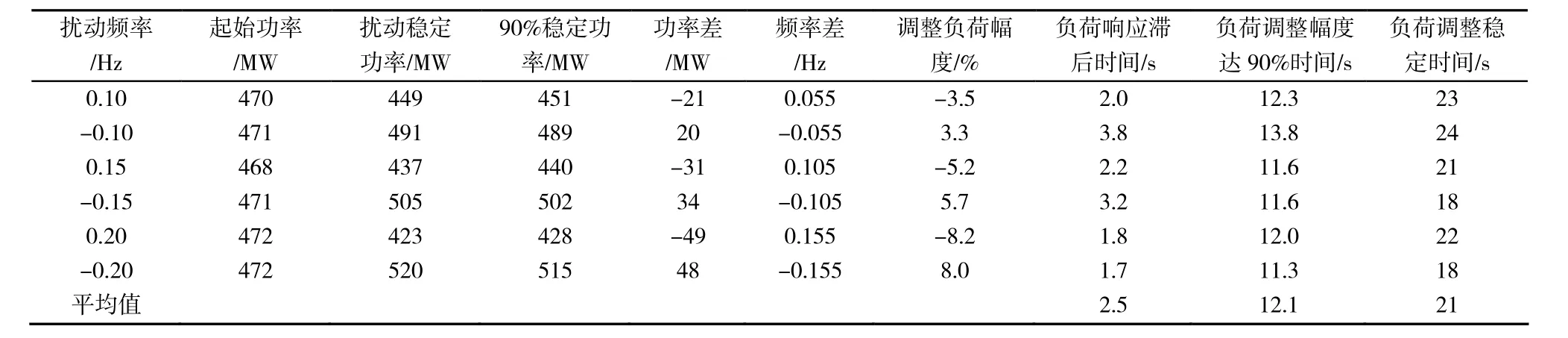
表2 功率模式下一次调频试验数据记录表
2.2 校核机组一次调频的调整负荷限幅功能
在额定频率50 Hz基础上分别施加±0.25 Hz阶跃频率偏差信号,校核机组负荷变化值是否超过±10%额定负荷。依据试验,当前水头下限幅10%额定负荷时开度模式积分限幅参数YL=4.8%,功率模式YL=6.0%,试验数据分别见表3、4。
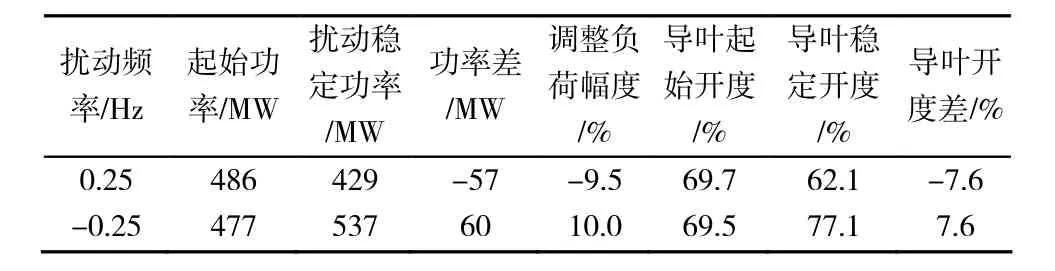
表3 开度模式下一次调频限幅试验数据记录表
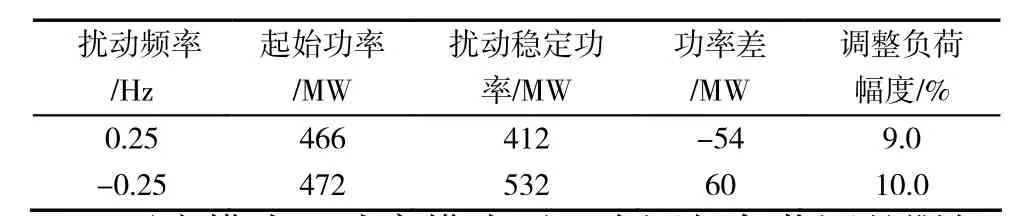
表4 功率模式下一次调频限幅试验数据记录表
开度模式、功率模式下一次调频负荷调整限幅功能均正常,为保证送出系统及孤网模式下安全稳定运行,根据国调要求一次调频暂未设定限幅值。
3 负荷调整性能分析
开度模式下,单机最大加负荷速度为333MW/min,单机最大减负荷速度为390 MW/min;在该试验水头下,依据机组加负荷速度测试,从空负荷调整到额定负荷的响应时间约100 s。功率模式下,单机最大加负荷速度为450 MW/min,单机最大减负荷速度为375 MW/min;在该试验水头下,依据机组加负荷速度测试,从空负荷调整到额定负荷的响应时间约85s。其试验数据均满足《水轮机调节系统并网运行技术导则》、《国家电网运行管理实施细则》要求,具体试验数据见表5。
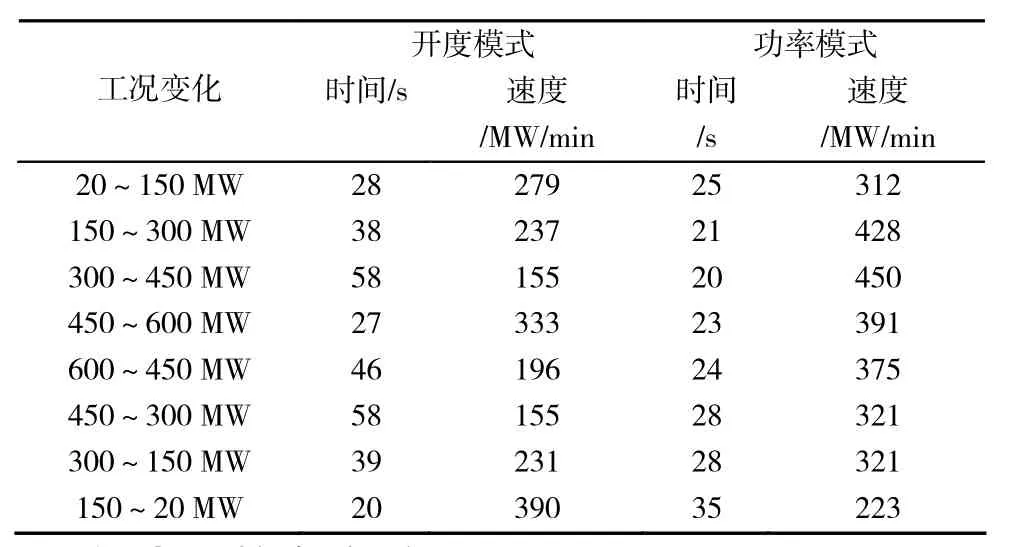
表5 开度模式下负荷增减试验数据记录表
4 有功调整存在的问题及处理
4.1 水力因素影响分析
在水力因素的影响下,无论机组运行在开度模式还是功率模式,都会受到水流特性的脉动影响,机组功率容易波动到死区之外,会触发有功调节对导叶进行开、关控制。分别在监控、调速器有功调整控制策略中设置两个功率死区Ep和Ep'(Ep>Ep'),Ep为判断机组是否需进行有功调整的死区,Ep'为判断机组有功调整是否结束的死区,这样可以增加机组有功受水力因素影响的裕度,从而降低导叶动作的频繁度。
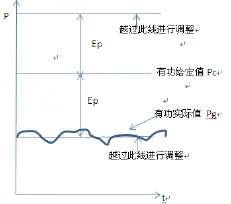
图2 设置1个死区的示意图
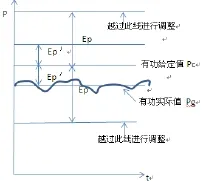
图3 设置2个死区的示意图
4.2 机组功率调整存在超调现象
开度模式下进行有功调整时出现超调,最高达28 MW,通过分析监控系统数据,发现有功调节PID参数设置不佳是此次引起超调的原因,对监控系统PID控制参数、功率死区和调节步长进行优化,将“大步向前”的调节方式改变为“小步快跑”方式,即脉冲调节采用逐步逼近方式进行,大于6 MW(死区)小于等于10 MW时采用200 ms脉冲微调节;大于10 MW小于等于20 MW时采用500 ms脉冲调节;大于20 MW小于等于48.8 MW时进行小于2 s的线性脉冲调节;大于48.8 MW时,进行2 s脉冲调节,从而彻底解决有功超调现象。
4.3 开度模式下水头下降时机组负荷缓慢自然降低
当机组功率调节至死区10 s后,闭锁输出,无论是一次调频动作还是水头变化引起负荷偏差,监控系统都不再进行功率调节,仅偏差大于20 MW时进行报警,这样会出现过负荷或者溜负荷。
对监控有功调整策略优化后,当一次调频功能投入、监控有功PID调节投入、机组有功当前值在-20 MW~600 MW之间时,若功率偏差小于监控系统调节死区10 s后,闭锁监控有功PID调节输出;监控有功调节输出闭锁后,若一次调频动作后20 s内功率差值大于监控调节死区,则机组LCU判定有功偏差超过死区是由于一次调频动作引起的,输出一直闭锁,直到新设定值下发时才会解除闭锁。当一次调频不动作时,功率偏差超过死区延时5 s解除监控有功PID调节输出闭锁,监控进行PID有功调节。
4.4 部分故障报警切换逻辑需完善
(1)开度模式下,监控系统对有功设定值(脉冲量)与实发值进行比较,向调速器输出调节脉冲,而有功设定值(模拟量)与实发值未进行比较,如果调速器从开度模式切换至功率模式会产生扰动,可在监控系统侧增加“有功设定值(模拟量)跟踪实发值”程序。
(2)在控制方式切换逻辑中,未考虑到监控系统与调速器数据中断或者数据测量不一致时的保护逻辑。功率模式下,可增加实时比较监控系统功率给定值和调速器功率给定反馈值的程序,如果不一致,上位机报警;可增加实时对比调速器系统反馈控制方式的程序,如果不一致,上位机报警。
(3)调速器PCC只监视了主CPU模块CP340的运行情况,未监视辅助CPU模块IP161的运行情况。当IP161模块死机时,不能正常采集外部重要模拟量信号和运行内部控制程序,在可编程智能切换模块中增加监视IP161运行情况的程序,当其故障或者死机时进行报警并进行PCC切换。
4.5 自动化元器件可靠性分析
调速器和监控系统所有外部自动化元件均采取冗余配置,但未进行数据对比判断元件故障,当自动化元件测量不准时,可能会导致溜负荷、过负荷、接力器抽动、有功波动等设备异常现象。设计时可考虑调速器A、B套双机通讯功能,将重要的外部测量信号(导叶反馈信号、功率反馈信号)进行比较,当两套采样值存在差异时,及时报警。
5 结语
通过对调速器数学模型、一次调频性能及负荷调整性能3个方面对机组有功调整稳定性进行分析,SAFR-2000 H调速器控制系统开度模式及功率模式两种方式下机组的动态调整稳定性均符合电网需求及相关规范要求。在目前的运行控制参数下,功率模式有功调节较开度模式速度更快,超调量更小,一次调频负荷稳定时间更短,但一次调频负荷响应速度较开度模式更慢。通过有功控制模式切换逻辑、故障报警切换逻辑、元器件可靠性和抗干扰性等方面对机组有功调整可靠性进行分析,开度模式及功率模式两种方式下部分监视、报警逻辑均需进一步完善。
随着智能电网的迅速发展,用户对电能质量的要求越来越高,水电站智能化电网建设是今后发展的必然趋势和全新目标,由于国内外在智能化水电站自动化技术方面的研究刚刚起步,通过对开度及功率模式下稳定性、可靠性深入分析,理顺了监控与调速器控制系统之间配合关系,但有功调节性能能否适应今后智能化发展的要求还有待深入分析。
[1]魏守平.水轮机调节[M].武汉:华中科技大学出版社.
[2]郭大安,范建军.浅析水电机组一次调频[J].水电厂自动化,2014,35(3).
[3]张亚明.葛洲坝水电站有功调节稳定性分析与改进措施探索[J].水电自动化与大坝监测,2013,37(2).
[4]张晋东.水电厂计算机监控系统功率调节的控制方式探索[J].科技向导,2012(29).
TP272
B
1672-5387(2016)07-0020-04
10.13599/j.cnki.11-5130.2016.07.006
2015-12-03
刘广宇(1972-),男,教授级高级工程师,从事水电站运行维护管理工作。
猜你喜欢
能源工程(2021年5期)2021-11-20 05:50:42
科学与财富(2021年33期)2021-05-10 16:54:38
北京汽车(2021年2期)2021-05-07 03:56:26
电站辅机(2021年4期)2021-03-29 01:16:52
水电站机电技术(2016年1期)2016-02-28 14:21:36
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
合成技术及应用(2015年3期)2015-12-11 08:36:27
海军航空大学学报(2015年4期)2015-02-27 13:45:51
水电站机电技术(2014年4期)2014-10-13 08:30:03
