
基于STM32的无线实时监控智能履带小车设计
2016-11-11 02:41高力,王庭有,张江等
新技术新工艺 2016年8期
基于STM32的无线实时监控智能履带小车设计
在现代社会生活中,机器人及其相关技术被广泛应用于机械、电子、交通、国防和农业等诸多领域。随着机器人研究广泛而又深入的开展,机器人不再仅仅局限于制造业,还被推广到采矿、救援和水电系统维修等非制造业领域,而移动机器人就是其中一个代表[1]。WiFi无线通信具有覆盖面积大和传输速度快的优点,可以使机器人在一些危险的环境下工作。智能小车由于具有自动循迹、避障和可控行驶等诸多优点,可以满足多种环境、任务的要求,且其制造价格低廉,运行稳定,受到很多危险作业和工业场合的青睐。我国开始快速注重机器人事业的发展,建立了许多高水平的研究发展基地,为新世纪机器人发展的创新奠定了基础[2]。
1 总体设计
智能小车以STM32系列单片机作为控制核心,通过红外传感器获取外界环境信号,由电动机驱动模块驱动小车运行,摄像头采集视频信息。智能小车的设计框图如图1所示,主要包括电源模块、避障模块、自动循迹、电动机驱动模块、摄像头、WiFi模块和单片机。

图1 系统结构框图
2 智能小车硬件系统
2.1 智能小车控制器
智能小车采用STM32系列的单片机(型号为STM32f103V8C6)作为核心,以ARM32位Cortex-M3作为CPU,64 kB的SRAM为存储器,拥有3种低功耗模式,2种调试模式(串行调试(SWD)和JTAG接口),48~144个I/O端口,8个定时器和2个看门狗定时器,最多达13个通信接口(2个I2C、5个USART、3个SPI和2个IIS)。STM32单片机具有功耗低、性能高和处理速度快等优点。
2.2 驱动模块
目前,常用的方法是通过脉冲宽度调制(PWM)来控制小车的车速。本文利用L298N芯片控制小车的2个直流电动机运行,也可以驱动1个步进电动机。由于PWM调速系统具有电流连续、运行平稳和可调范围较宽的优点,适合通过占空比改变电压[3]。其工作原理是通过调制器给电动机提供一个具有一定频率的脉冲宽度可调的脉冲电,脉冲宽度越大即占空比越大,提供给电动机的平均电压越大,转速越快,小车的运行速度就越快;反之亦然。驱动模块电路原理图如图2所示。
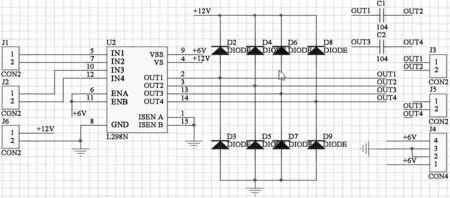
图2 驱动模块电路原理图
2.3 智能小车避障、循迹模块
小车的循迹和避障模块都采用发射接收一体化的红外传感器。它具有体积小、灵敏度高和受其他光线影响小的优点。其红外线发射的距离为1~60 mm,通过红外发射管和接收管进行避障和自动循迹。若发射的红外信号碰到障碍物将会返回信号,接收管接收到信号后给单片机提供稳定的TTL信号。
由于红外传感器发射的红外波会被黑色吸收,碰到其他颜色则会反射回信号,因此将黑色胶带作为线路,小车可沿此线路前进。
2.4 WiFi模块
WiFi模块是刷Openwrt系统的路由器,然后在系统上安装摄像头的驱动。它的功能是上位机向小车发送控制信号,同时将摄像头采集到的视频信号发送到上位机。路由器通过安装Ser2net实现网络转换串口,设置好波特率、数据位和停止位等,然后路由器通过WiFi信号和上位机通信。由路由器引出3条线,即TTL串口,它是一种通信串口,一般用不同颜色代表不同的意义:TX(红线)代表发送数据;RX(绿线)代表接收数据;GND(黑线)代表地线。
2.5 摄像头模块
摄像头的主要工作原理是以一定分辨率通过隔行扫描的方式来采集图像上的点。当扫描到点时,就把该点的灰度转换成对应的电压,再把该电压从信号端口输出,然后摄像头中的DSP将对图像信号进行优化和压缩。摄像头主要包括镜头、CCD图像传感器和A-D转换器等[4]。本文采用USB摄像头(天敏天轮UVC-S)。因其传输速度高,接口简单,兼容性高,即插即用,几乎所有的电子设备上都有USB接口,它已经成为了电子产品所必须的接口,是用户的首要选择。
2.6 电源模块
单片机开发板自带5 V转3.3 V芯片(AMS1117—3.3)。智能小车需要5 V和3.3 V电压,5 V电压是路由器和红外传感器电压,可以从驱动模块处直接引出;3.3 V电压是单片机的电压,需通过AMS1117—3.3芯片将5 V电压转换成3.3 V电压[5]。它是一个正弦低压稳压器,在1 A电流下电压为1.2 V,并且内部集成过热保护和限流电路,是电池供电和便携式计算机的最佳选择。如果片内过热,切断电路具有过载和过热保护的功能,以防环境温度造成过高的结温,也避免因为过高的温度烧坏模块。
3 智能小车软件设计
小车的控制系统软件设计是基于Keil Vision4环境,并使用C语言进行程序编程。智能小车的上位机界面使用Labview进行编译。在使用Labview进行编程时应注意,Labview只能调用本地摄像头,不能调用网络摄像头,所以需要通过IP camera adapter软件把网络摄像头的视频地址改为本地摄像头的视频地址。上位机软件设计流程如图3所示。
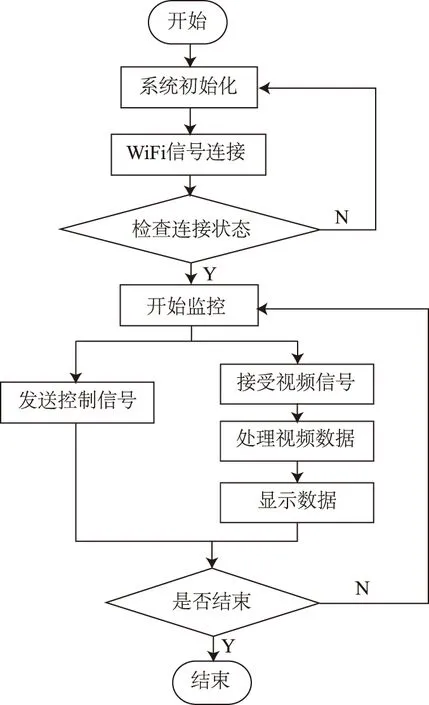
图3 上位机软件设计流程图
4 结语
基于STM32单片机的智能小车实现了无线控制、避障和视频实时监控等功能。智能小车具有良好的稳定性、实用性和扩展性,且构造简单,成本低,可以应用于对未知危险环境的探索。
[1] 田涛,邓双城,杨朝岚,等. 工业机器人的研究现状与发展趋势[J]. 新技术新工艺, 2015(3):92-94.
[2] 苏云天. 俄罗斯机器人技术发展趋势[J]. 全球科技经济瞭望,1999(2):10-11.
[3] 程志江,李剑波. 基于模糊控制的智能小车控制系统开发[J]. 计算机应用,2008, 28(z2):350-353.
[4] 樊国栋,石红瑞,张健. 嵌入式Linux下CMOS摄像头驱动的设计与实现[J]. 工业仪表与自动化装置,2010(3):68-70.[5] 周立功.项目驱动—单片机应用设计基础[M].北京:北京航空航天大学出版社,2011.空间大的优势,因此有着广阔的发展前景。
责任编辑 马彤
高 力,王庭有,张 江,张 彬
(昆明理工大学,机电工程学院,云南 昆明 650500)
智能小车具有智能避障、实时监控和控制小车的功能。智能小车以STM32单片机作为处理器,通过路由器来接收控制信号和发送视频信号;以履带小车作为底盘,具有良好的越障性能和稳定性能,直流电动机和控制电路作为系统的驱动;将红外传感器作为小车的智能避障模块。智能小车将计算机或者手机作为上位机,通过路由器可以在上位机中显示视频和发送控制信号控制小车运行。系统设计主要包括软件设计和硬件设计,软件设计包括上位机软件的编写和对单片机程序的编写;硬件设计是指电路设计,包括电动机驱动和无线通信等。
履带小车;WiFi;STM32单片机;上位机
Wireless Real-time Monitoring of Intelligent Track Car based on STM32
GAO Li,WANG Tingyou,ZHANG Jiang,ZHANG Bin
(Faculty of Mechanical and Electrical Engineering, Kunming University of Science and Technology, Kunming 650500, China)
The intelligent car has the function of the real-time monitoring and the intelligent obstacle avoidance. The intelligent car uses the STM32 microcontroller as the processor, receives the control signal and sends video signal with a router; the tracked car is used as a chassis, which has the better obstacle-surmounting performance and stable performance; a DC motor drive and control circuit mane a system; the infrared sensors become intelligent obstacle avoidance module of the car. Intelligent cars make a computer or mobile phone as a PC, display video in the upper machine and send the collected signals to control the running of the car with a router. The system mainly includes the software and hardware design. The software design refers to the writing of PC software and single-chip microcomputer program. And the hardware design refers to the circuit design including the motor drive, wireless communication and so on.
tracked vehicles, WiFi, STM32 microcontroller, upper machine
高力(1990-),男,硕士研究生,主要从事光机电液机械集成与控制等方面的研究。
王庭友
2016-04-13
TN 948.6
A
猜你喜欢
科教新报(2022年24期)2022-07-08
作文小学中年级(2021年10期)2021-12-26
科教新报(2021年23期)2021-07-21
恋爱婚姻家庭·养生版(2021年5期)2021-05-31
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
文苑(2018年22期)2018-11-19
车迷(2018年12期)2018-07-26
电子制作(2018年8期)2018-06-26
中国老区建设(2016年3期)2017-01-15
