
光纤陀螺温度建模与补偿方法分析
2016-11-10 07:50陈军波
海军航空大学学报 2016年1期
赵 冰,陈军波
(1.92941部队,辽宁葫芦岛125001;2.北京自动化控制设备研究所,北京100074)
光纤陀螺温度建模与补偿方法分析
赵冰1,陈军波2
(1.92941部队,辽宁葫芦岛125001;2.北京自动化控制设备研究所,北京100074)
通过光纤陀螺温度试验,分析了光纤陀螺的温度特性;理论上阐述了各项温度因素对光纤陀螺零偏的影响,并采用逐步回归分析的方法建立光纤陀螺零偏的温度数学模型。通过试验验证,采用该模型对光纤陀螺进行温度漂移的补偿,可以有效提高光纤陀螺的测量精度。
光纤陀螺;温度特性;温度建模;温度补偿
光纤陀螺是一种新型的固态惯性测量仪表,与普通机械陀螺和激光陀螺相比,具有结构简单、体积小、重量轻、耐振动、响应速度快、动态范围宽、测量精度高以及抗电磁干扰、无加速度引起的漂移等特点,在航天、航空、航海和兵器领域得到了广泛的应用[1-4]。光纤陀螺主要由光源、偏振器、PZT相位调制器、光纤耦合器和光纤线圈等组成,其主要组成部件均为温度敏感器件,环境温度对光纤陀螺的性能影响较大;而工程应用要求光纤陀螺应具有较宽的工作温度范围及较强的温度适应性。因此,对光纤陀螺进行温度特性分析,建立温度影响的数学模型,从而对光纤陀螺进行温度补偿,提高陀螺测量精度是实现光纤陀螺工程化应用的必要条件[5]。
本文从温度试验入手,分析光纤陀螺的温度特性。通过理论分析和试验结果找出影响光纤陀螺精度的各项温度因素,建立光纤陀螺零偏受温度影响的数学模型。利用该模型对光纤陀螺输出进行温度补偿,可以有效提高光纤陀螺的测量精度。
1 光纤陀螺温度试验及温度特性分析
1.1温度试验设计
通过设计温度试验,对光纤陀螺的温度特性进行分析[6-7]。试验项目包括固定温度点长时间工作试验和变温试验。
固定温度点长时间工作试验:在-40℃~+60℃温度范围内,取若干温度点,测试光纤陀螺在该温度点环境下长时间工作(1 h)的输出特性。
变温试验:在全温度范围内,选择不同的温度变化速率,测试在温度变化的环境下,光纤陀螺的输出特性。
温度试验设备组成包括工控机、可调变温速率温箱、光纤陀螺和测试台,如图1所示。

图1 光纤陀螺温度试验系统组成示意图Fig.1 Temperature test system schematic diagram of FOG
其中,测试台实现对光纤陀螺输出和光纤陀螺内部温度值的测量和数据记录,温度传感器的精度为±0.5℃;温度控制精度为0.1℃;光纤陀螺常温精度零偏稳定性优于0.1(°)/h,零偏重复性不大于0.05(°)/h。
1.2试验结果分析
对光纤陀螺进行恒温温度试验,得到光纤陀螺零偏随温度变化的曲线,2次测试结果如图2所示。
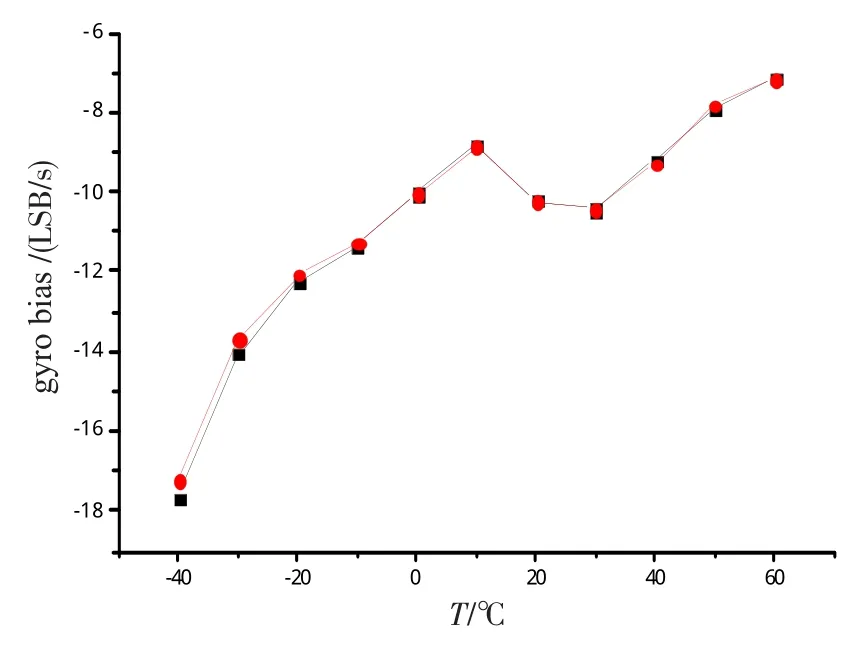
图2 恒温定点试验结果Fig.2 Test result of constant temperature fixed-point
对光纤陀螺进行-40℃~+60℃的升、降温测试,得到温度变化率分别为0.5℃/min、1℃/min、2℃/min的试验结果,如图3~5所示。曲线均为500点相邻值平滑滤波结果。

图3 温度变化率0.5℃/min下试验结果Fig.3 Test result of variable temperature test at0.5℃/min
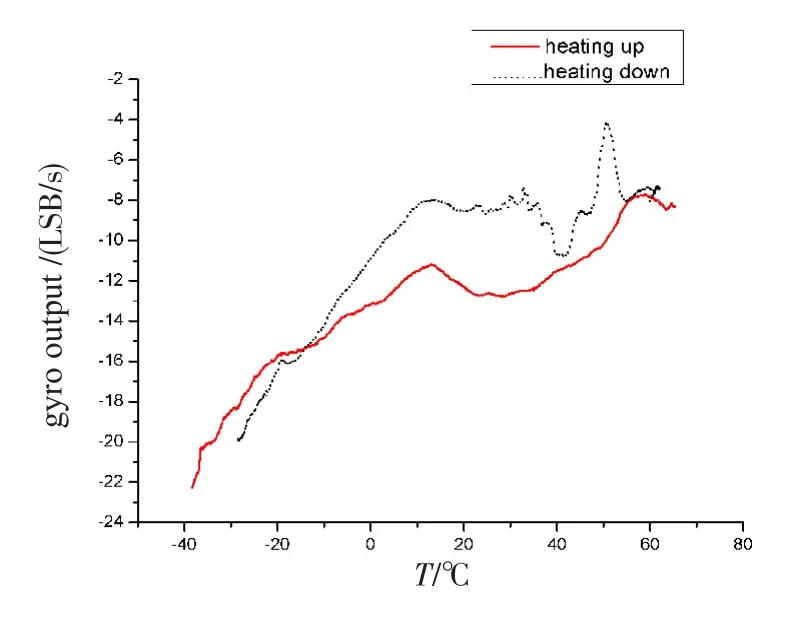
图4 温度变化率1℃/min下试验结果Fig.4 Test result variable temperature at1℃/min

图5 温度变化率2℃/min下试验结果Fig.5 Test result of variable temperature at2℃/min
从不同温度变化率对应光纤陀螺输出曲线上可以看出:
1)在-40℃~+60℃的变化过程中,不同的环境温度变化率,同一光纤陀螺零偏变化趋势相同。
2)升温过程和降温过程,光纤陀螺输出不一致。原因是:首先,光纤陀螺内部温度相对于环境温度有延迟,而升温和降温过程相对于环境温度(温箱温度)的延迟刚好相反,所以造成升降温陀螺输出曲线呈环状;其次,光纤陀螺的零位漂移不仅仅和温度有关,还和温度梯度、温度变化率等因素有关。
光纤陀螺的输出零偏主要是由内部器件的测量误差引起的,而占主要部分的温度影响是由于光纤陀螺中的温度敏感元件引起的。光纤陀螺的各个组成部分中,光纤敏感环圈是关键件,光源、Y波导、检测电路是重要件,耦合器、探测器是一般件。而作为光纤陀螺关键件的光纤敏感环圈是温度敏感器件,温度变化将使光纤敏感线圈产生Shupe效应,导致陀螺测量误差;而重要件的工作特性随温度变化也将受影响。
可见,温度对于光纤陀螺漂移的影响是其对于光纤陀螺内部元件影响的综合效应,而温度对陀螺温度敏感元件的影响是非线性的,各个部件的温度特性不一致。温度敏感元件对陀螺漂移影响的不确定性以及目前的工艺条件和元器件的限制使得对内部温度敏感器件分别进行温度建模补偿较难实现。在现有条件下确定光纤陀螺温度特性的有效方法是将其视为一个“黑箱”,根据陀螺的输出和温度之间相互关系建立模型。这要求陀螺的输出和温度之间存在相关性,同时陀螺漂移要具备一定的重复性。试验表明,光纤陀螺具备上述2个条件。研究认为,光纤陀螺的温度漂移主要受温度、温度变化率、温度梯度影响,而温度梯度对现有光纤陀螺漂移的影响相对较小,所以建立的温度补偿模型暂不考虑温度梯度项[4]。
2 光纤陀螺温度补偿模型
采用定温试验标定模型结合变温试验数据模型,建立综合补偿模型[8]。
定温试验标定模型主要用于补偿光纤陀螺在该温度下的零偏,变温数据模型用于补偿变温条件下的陀螺零偏温变误差。模型形式:

2.1定温标定温度补偿模型
根据定温温度标定试验得到标定结果,建立定温标定试验的温度多项式补偿模型:

对多项式参数的辨识,辨识算法采用最小二乘算法。确定模型的结构——多项式模型的阶次满足2点要求:由陀螺的零偏温度曲线可以大致选择多项式模型的阶次;逐次增加模型的阶次,并同时计算拟合点的拟合均方根误差,在拟合误差允许的情况下,选择较低阶次的多项式模型。
实际计算表明,对于模型参数求解的正则方程组,当模型阶次n较大时,正则方程组往往是病态的,为了保证计算精度,拟合多项式不宜超过5阶,且拟合多项式只是在原始数据范围内估计精度较高,超出这个范围用拟合多项式做预报,可能得出错误的结果。故拟合算法中,待拟合模型的最高阶次M设定为5,这对于大多数情况来说都可以满足的。
依据上面的算法,采用数据处理软件Matlab进行拟合算法的程序编写,建立光纤陀螺的定温零偏模型,得到多项式模型:

2.2变温补偿模型
2.2.1分析方法
建立变温数据温度模型时,因影响模型的因素理论上不易分析,所以采用逐步回归法建立影响变温漂移的多变量模型。
逐步回归法是从与y有关的变量中选取对y有显著性影响的变量来建立回归方程的一种方法[9-11]。其基本思想是:在所有考虑的因素中,按对y的作用的显著程度的大小,取最显著的变量,逐一引入回归方程,对y作用不显著的那些变量自始自终都未被引入。另一方面,已被引入回归方程的变量,在有引入的新变量后若发现其对y的作用变为不显著时,则随时从回归方程中剔出,直至没有新的变量能引入方程,且已引入方程的所有变量均不需剔出为止。利用这些变量就可以建立起线性多元回归方程。
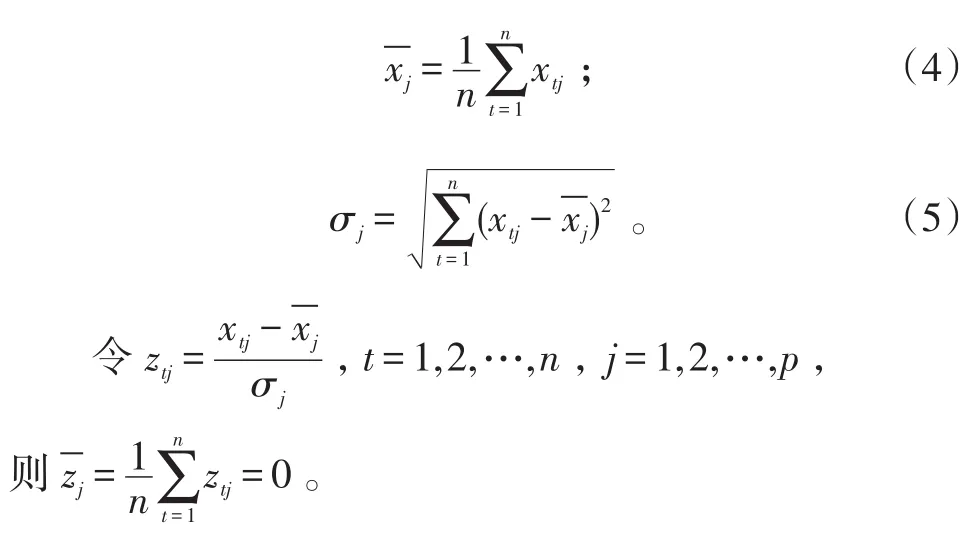
设共有 p-1个自变量:x1,x2,…,xp-1,记y≡xp。对所获得的n组测量得到的样本数据() xt1,xt2,…,xtp,t=1,2,…,n,计算各个变量的均值-xj及偏差平方和的算术根σj(j=1,2,…,p):

建立zp关于z1,z2,…,zp-1的线性回归方程:
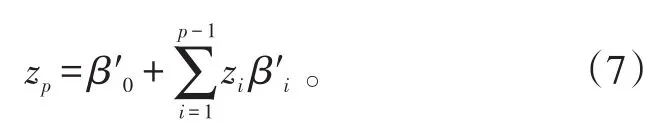
由于zj都是标准化后的变量,故:
从而zp关于z1,z2,…,zp-1的线性回归方程记为:
化为y关于x1,x2,…,xp-1的线性方程:

由变量的关系,可以推导出:
2.2.2动态温度补偿模型的建立
由前面的分析可知,光纤陀螺的零偏与温度的关系是复杂的非线性关系,即与温度、温度变化率及其交叉项都可能有关系[11]。考虑三阶变量,分别令:作为线性多变量模型的自变量,线性多变量模型:

模型中的常数项:

式(14)中:Y为陀螺零偏;X为自变量;P为模型的参数;in为经逐步回归分析后保留在模型内的自变量。
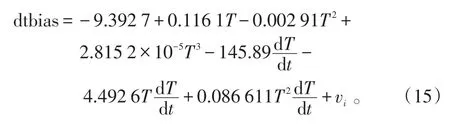
对陀螺进行逐步回归温度补偿模型建立,得到逐步回归模型:
3 试验验证
利用建立的温度补偿模型对光纤陀螺变温数据进行温度补偿,得到补偿效果如图6~8所示,不同温度变化率数据补偿效果见表1。

图6 补偿1℃/min升降温数据效果Fig.6 Compensation1℃/minwarming and cooling effect of data
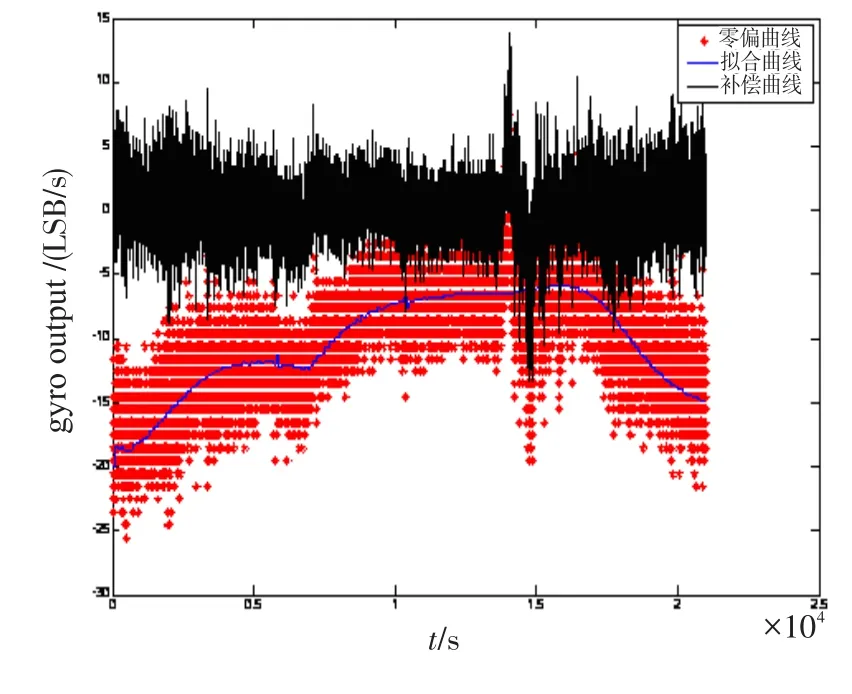
图7 补偿0.5℃/min升降温数据效果Fig.7 Compensation0.5℃/minwarming and cooling effect of data
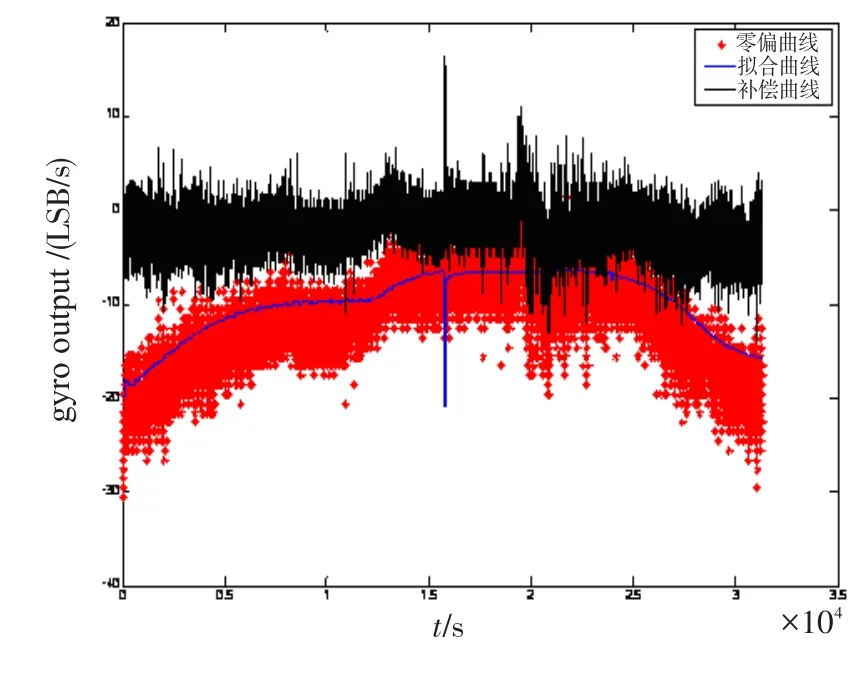
图8 补偿2℃/min升降温数据效果Fig.7 Compensation2℃/minwarming and cooling effect of data

表1 不同温度变化率数据补偿效果Tab.1 Compensation effect of different temperature rate data
从表1统计的补偿效果看,温度漂移补偿模型对于不同温度变化率的数据均有一定的补偿效果。因此,采用逐步回归方法建立的多变量补偿模型对光纤陀螺的温度漂移补偿是有效的。
4 结束语
本文通过光纤陀螺的温度试验,分析了陀螺温度特性;利用逐步回归法建立了光纤陀螺的变温补偿模型。通过试验验证可以得出以下结论:
1)根据逐步回归分析,光纤陀螺零偏与温度、温度变化率以及其交叉项具有相关性,而与温度变化率的高次项相关性较弱。采用多变量模型对光纤陀螺零偏进行补偿,可以有效提高光纤陀螺的测量精度。
2)对于不同的光纤陀螺,其定温试验标定模型和变温数据补偿模型的参数和模型的结构可能会有所变化,需要分别对每一个陀螺进行温度标定。
[1]孙丽,王德钊.光纤陀螺的最新进展[J].航天控制,2013,16(3):75-80. SUN LI,WANG DEZHAO.Recent development of fiber optic gyro[J].Aerospace Control,2013,16(3):75-80.(in Chinese)
[2]于明飞.光纤陀螺技术的军事应用及前景[J].计算机测量技术,2011,27(5):785-788. YU MINGFEI.The application and prospect of fiber optic gyrocope technology in military[J].Computer Measurement Technology,2011,27(5):785-788.(in Chinese)
[3]郭秀中.惯性系统陀螺仪理论[M].北京:国防工业出版社,1996:175-178. GUO XIUZHONG.Gyroscope inertial system theory[M]. Beijing:National Defense Industry Press,1996:175-178.(in Chinese)
[4]刘兰芳,陈刚,金国良.光纤陀螺仪基本原理与分类[J].现代防御技术,2007,32(4):36-40. LIU LANFANG,CHEN GANG,JIN GUOLIANG.Principle and classification of fiber optic gyrocope[J].ModernDefense Technology,2007,32(4):36-40.(in Chinese)
[5]谭显裕.光纤陀螺的关键技术及其军用研究[J].航空兵器,2003(3):32-35. TAN XIANYU.The key technology of fiber optic gyro and its military research[J].Aviation Weapon,2003(3):32-35.(in Chinese)
[6]孟照魁,崔佳涛,章博,等.高精度光纤陀螺温度实验研究[J].宇航学报,2007,28(3):580-583. MENG ZHAOKUI,CUI JIATAO,ZHANG BO,et al.Experiment research of the high precision fiber optic gyrocope tempreature[J].Journal of Astronautics,2007,28(3):580-583.(in Chinese)
[7]张春喜,李森,陈光见.光纤陀螺惯性测量组合的数字温控系统设计[J].中国惯性技术学报,2012,16(5):541-547. ZHANG CHUNXI,LI SEN,CHEN GUANGJIAN.Digital temperature control system design for FOG inertial measurement unit[J].Journal of Chinese Inerial Technology,2012,16(5):541-547.(in Chinese)
[8]张鹏飞,龙兴武.二频机抖激光陀螺零偏的温度特性的逐步回归分析[J].光学技术,2014,32(5):738-740. ZHANG PENGFEI,LONG XINGWU.Analysis on temperature characteristic of mechanically dithered RLG’bias with a method of stepwise regression[J].Optical Technique,2014,32(5):738-740.(in Chinese)
[9]何晓群,刘文卿.应用回归分析[M].北京:中国人民大学出版社,2001:41-45. HE XIAOQUN,LIU WENQING.Application of regression analysis[M].Beijing:Renmin University of China Press,2001:41-45.(in Chinese)
[10]费业泰.误差理论与数据处理[M].北京:机械工业出版社,2005:118-152. FEI YETAI.The error theory and data processing[M].Beijing:Mechanical Industry Press,2005:118-152.(in Chinese)
[11]梅硕基.惯性仪器测试与数据分析[M].西安:西北工业大学出版社,1991:138-186. MEI SHUOJI.Inertial instrument test and data analysis [M].Xi’an:Northwestern Polytechnic University Press,1991:138-186.(in Chinese)
Analysis on Temperature Modeling and Compensation Mothed of FOG
ZHAO Bing1,CHEN Junbo2
(1.The 92941stUnit of PLA,Huludao Liaoning 125001,China; 2.Beijing Institute of Automation and Control Equipment,Beijing 100074,China)
Based on temperature experiment,the temperature characteristic of FOG’s modeling was studied,the factors ef⁃fected on gyro’s modeling was analyzed.From the aspect of theory the effect on the FOG’s modeling was studied,and some useful methods was proposed in this paper to found the temperature compensating model.The model was used to compensate the FOG’s modeling for reduce gyro’s error.The results of compensation showed that the stability was en⁃hanced and the compensation model was effective.
FOG;temperature characteristic;temperature modeling;temperature compensation
V241.5;TP212
A
1673-1522(2016)01-0012-05
10.7682/j.issn.1673-1522.2016.01.003
2015-09-16;
2015-12-22
赵冰(1965-),男,高工,大学。
猜你喜欢
农业灾害研究(2022年6期)2022-08-29
沈阳农业大学学报(2022年2期)2022-06-04
初中生世界·九年级(2020年9期)2020-09-21
发电技术(2020年3期)2020-06-29
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
热带农业科学(2018年2期)2018-06-21
快乐语文(2018年36期)2018-03-12
江苏农业科学(2016年1期)2017-05-17
