
三维激光扫描在溶洞勘察设计中的应用研究
2016-11-09 01:35胡开承湖南省交通规划勘察设计院湖南长沙410008
低碳世界 2016年29期
胡开承(湖南省交通规划勘察设计院,湖南长沙410008)
三维激光扫描在溶洞勘察设计中的应用研究
胡开承(湖南省交通规划勘察设计院,湖南长沙410008)
三维激光扫描技术具备准确性、动态性、实时性等特征,并且还可获得空间三维数据,是当前测绘行业中最新的一种应用技术。如何将这一技术应用于工程项目中,并与现有系统接轨,是我们面临的主要问题。在某高速公路溶洞探测项目中,我们充分利用激光扫描这一先进技术对溶洞进行全方位扫描,并开发相应软件,对数据进行数据后处理研究,取得了良好的效果,并与设计软件有效衔接,方便设计的进行。
三维激光扫描;工程测量;应用
1 引言
在工程的勘察设计中,我们经常碰到溶洞这一特殊地质条件,由于溶洞一般结构非常复杂,内部环境非常恶劣,常规测量施测非常困难。三维激光测量技术的出现和发展为溶洞的勘察设计提供了全新的技术手段,三维激光扫描测量技术克服了传统测量技术的局限性,采用非接触主动测量方式直接获取高精度三维数据,能够对物体进行扫描,且没有白天和黑夜的限制,快速将现实世界的信息转换成可以处理的数据。它具有扫描速度快、实时性强、精度高、主动性强、全数字特征等特点,可以极大地降低成本,节约时间,而且使用方便。
此情况下,对三维激光怎么扫描、扫描数据怎么处理、怎么使用这一新的数据类型进行深入的分析具有十分重要的意义。
程测量作业中,三维激光扫描已经获得了十分广泛的应用,可有效降低作业成本,节省作业时间,使用也较为便利,输出格式直接与CAD、三维动画等工具软件接口。但是在使用的过程中也存在不少问题有待解决。
2 三维激光扫描的技术原理与系统组成
2.1 技术原理
对于三维激光扫描技术的核心原理,即为在激光距离测量与步进角度测量,在进行实际测量作业时,三维激光扫描仪能够对待测量建筑物的某一个目标面发射激光,之后再通过激光发射与反射被仪器接收到的两个时间点,形成时间差,以此来对实际距离值进行一定的计算。同时,其还能够记录、计算水平与垂直方向的角度值,以获得观测上某一点的三维相对坐标。
此外,通过连快速扫描,还可获得若干个点的三维坐标,这些坐标值能够在电脑中形成观测目标的点云数据库,在完成上述操作之后,应用后处理软件分析处理点云数据之后,仅需要采用3D建模软件就可形成较高精度的观测目标虚拟三维影像,以获得观测目标的空间结构和详细内部尺寸数据。
2.2 系统组成
通常情况下,三维激光扫描系统主要构成要素包括三维激光扫描仪、数字照片成像设备、点云数据处理软件与其他附加设备。其中,通过扫描仪的应用,可获得目标三维数据;对于照片成像设备,则可对目标原始情况进行相应的记录,并且还能够参与后期模型修正过程;对于后处理软件,可对已经获得的点云数据进行一定的读取与处理,例如ILRIS3D扫描仪的Polyworks软件、Leica三维激光扫描仪的Cyclone后处理软件等,上述软件均能够对数据进行编辑、转换、拼接与三维建模。
3 三维激光扫描在溶洞探测中的应用
3.1 项目概述
某高速公路修建时,发现特大型厅堂式溶洞,溶洞长约150m,落差约40m,溶洞分布基本与隧道左洞轴线一致,为进一步探明溶洞形态,方便后续处治勘察设计及施工的进行,对溶洞进行了三维激光扫描。
但是现有的隧道设计等软件不支持点云输入,为解决这一现实问题,与现有的隧道设计等软件良好衔接,在对现场进行精细扫描后,对数据进行进一步的应用研究,并编制相应的软件对数据进行处理。三维激光扫描应用,解决了溶洞隧道探测的难题,极大地提高了生产效率,并与现有设计系统实现无缝对接。
3.2 三维激光扫描数据采集
控制布设:
在扫描前先行进行导线测量,将隧道控制引入溶洞区域。高程精度以四等水准要求进行控制。
以隧道施工控制点作为起算数据,使用2“级全站仪,采用一级导线,以左右线路方式形成闭合路线。
高程测量以三角高程形式测定,在平面测量时同步测量三角高程,并进行闭合水准线路平差,确保成果质量。
在控制布设的同时,进行靶标点进行测量。
三维激光扫描仪主要采用自由架站方式进行,仅需要选择坚硬稳固的地面,并且能够与目标靶标点通视的位置作为实际架站点即可。在该工程项目作业中,依据场地实际情况,在溶洞中架设了24个站点,确保每个站点均有5个激光扫描靶点。
通过布设并测定反射片,将多站扫描数据拼接成一个整体并转换至施工坐标系。
考虑到激光不能穿透水体,洞底积水部分采用全站仪配合棱镜进行人工测定,平面及高程测量点精度均宜<0.05m。密度应能保证内差断面精度能满足高速公路横断面测量精度要求。人工测定数据与扫描数据一起进行处理。
通常情况下,在外业数据采集作业中,数据扫描具有重要的作用,其主要涉及三维激光扫描与三维坐标测量两部分内容。在采用三维激光扫描进行工程测量作业时,应当依据仪器指标与工程实际情况,明确具体扫描间距、扫描距离与标靶位置,在扫描的点云数据中,应当能够分辨出标靶中心位置,还需要对遮挡问题进行高度关注。
3.3 激光点云数据处理
对于激光扫描获得的点云数据都是以扫描仪位置为零点的局部坐标系,亦即每次经扫描而得到的点云数据的坐标系是独立和不相关联的。但实际上每幅点云阵数据都是扫描场景的一部分,那么有必要将这些点云数阵据转化到同一坐标系里。所以要对得到的点云阵数据进行拼接匹配,其常规方法是利用选择两幅扫描图像的公共点的办法来实现拼接,选择完成后软件可自动完成匹配并可查看拼接匹配误差。这样便将各个扫描文件独立的坐标转换成为以导入拼接软件的第一幅点云数据的局部坐标为整个扫描场景的坐标。然后可利用现场测得的标志点坐标对拼接好的点云数据进行坐标转换,以使扫描得到的点云数据与现实场景的方位、位置完全一致。
项目在进行内业数据处理作业时,先将通过三维激光扫描仪扫描获得的数据导入RIEGL自带的点云处理软件RISCANPRO,然后对扫描数据进行相应的处理。依据每个站点数据间重叠区域数据特征进行自动拼接,并将拼接坐标转换至施工坐标系下。通过详细的检查发现,该工程拼接精度优于5mm。
测量数据最重要的用途是使用,因此,为了方便数据的使用,必须对数据进行必要的进一步处理,处理包括点云数据的平滑、点云数据的缩减、点云数据的分割,在此基础上进行三维模型的重建、模型重建后的平滑、残缺数据的处理、模型简化和纹理映射等。方便模型的可视化表达。
同时,数据的使用不光是展示,更重要的是应用,因此数据还需要进行必要的格式转换,提供程序开发及设计使用。因而项目转换生成经处理的拼接的扫描点数据,以及AutoCAD的DXF激光点云数据和3角网面模型数据供勘察设计的进一部使用。
3.4 激光数据的拓展运用
为了便于隧道工程设计的使用,我们针对公路设计开发相关程序对点云数据进行进一步的拓展使用。
断面的截取:
(1)缓冲区的选定
在数据的处理中,首先要明白一点,点云的密度是有限的,在数据处理中,过大的密度会增大系统负担,甚至导致系统的崩溃。因此在实际运用中,点云的密度是有限的。
在这有限密度的点云中截取断面,精确位于断面上的点是稀疏的,不利于数据的利用,因此有必要设置一个缓冲区,使与断面一定偏差内的数据均于断面上显示,同时因此根据点云的密度选定适当的缓冲区,是相应范围的扫描点作为断面数据点。使断面上扫描点能足够反映现场情况,精度又能满足项目的需要。同时为进一步提高判别精度,对于不同偏差点设置不同的颜色。缓冲区的选定应根据规范及现场数据情况灵活选定。
(2)断面的截取
首先根据公路线形,生成相应的纵横断面。一般情况下,公路线形是一条直线的时候较少,因此随机软件中的断面生成不能满足工程的需要。同时根据公路里程及标高生成纵断面图。横断面根据线路的切线垂线方向确定断面方向,根据设定的断面距离自动生成相应里程的横断面。同时可根据需要生成任意断面。方便勘察设计的进行(见图1~2)。
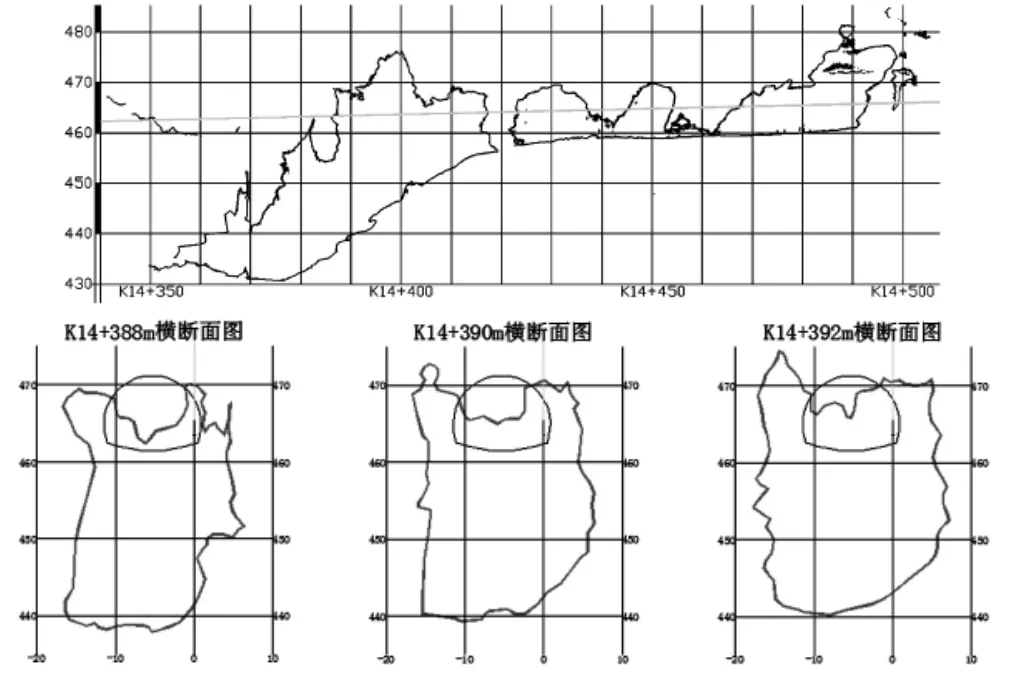
图1 纵、横断面数据

图2 任意断面数据
(3)数据文件生成
点云数据生成后,拟合出断面线,并根据设定的滤波阀值进行优化,并生成设计需要格式的数据文件。
(4)等高点云数据
同时为方便设计人员对于洞内情况的了解,对数据进行分层,避免数据重叠影响设计人员的判读。同时生成易于判读的等高线点云数据,并对不同层数据分色显示,方便设计及其他人员的使用。如设计人员可选区相应高程数据可生成洞顶地形图、洞底地形图、侧视等距图等方便外业勘测人员的现场使用以及设计的进一步进行。

图3 彩色等高线点云地形图(洞底)

图4 侧视等距图
4 结语
总而言之,在当前工程测量作业中,三维激光扫描技术由于出现较晚,其运用受环境及勘察设计软件的制约,但由于其具备无法比拟的特殊优势,所以在进行工程测量作业时,应积极探索数据处理的进一步完善,并将三维激光测量技术与传统的测量方法联合作业,以满足工程实际需要,促进我国工程测量行业的持续发展。
[1]马 利,谢孔振,白文斌,等.地面三维激光扫描技术在道路工程测绘中的应用[J].北京测绘,2011(02):48~51.
[2]郁凯帆,蒋小琴.地面三维激光扫描技术在道路工程测绘中的应用研究[J].建材与装饰,2015(47):56~58.
P225.2
A
2095-2066(2016)29-0111-02
2016-9-28
胡开承(1976-),男,高级工程师、注册测绘师,硕士,主要从事公路水运勘测工作。
猜你喜欢
韩国语教学与研究(2022年3期)2022-02-08
智慧少年·故事叮当(2020年5期)2020-08-17
作文成功之路·小学版(2019年6期)2019-07-12
模具制造(2019年3期)2019-06-06
云南师范大学学报(自然科学版)(2019年2期)2019-04-04
幼儿100(2017年31期)2017-11-27
中国公路(2017年7期)2017-07-24
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
凿岩机械气动工具(2014年3期)2014-03-01
