
阀厅智能巡检机器人系统的红外成像设备定位
2016-11-09 07:32孙德利孙艳鹤
电子设计工程 2016年19期
朱 静,孙德利,孙艳鹤
(国网辽宁省电力有限公司 检修分公司,辽宁 沈阳110000)
阀厅智能巡检机器人系统的红外成像设备定位
朱 静,孙德利,孙艳鹤
(国网辽宁省电力有限公司 检修分公司,辽宁 沈阳110000)
为了实现阀厅智能巡检机器人系统对设备的精确测温,需要对阀厅中红外图像设备精确定位,文中提出了一种新的定位红外设备的方法。对已有的一幅红外图像,先进行图像预处理,然后使用SURF(Speeded Robust Features)算法提取整幅图像的特征,最终将这幅图像的特征点与待检测图像的特征点进行匹配,便可精确的定位出待检测的设备。实验证明,该方法对红外图像的设备定位的效果较好,精确度也较高。
阀厅;巡检机器人;SURF;设备定位
阀厅作为换流站的核心部分,是放置换流阀的封闭建筑,换流站及直流输电系统的运行性能和安全可靠程度与阀厅内电力设备的安全运行度密切相关,对整个电力系统的运行也有重要的影响[1]。换流阀在工作时会因自身功率耗散产生大量的热,故其配有可靠性很高的高效冷却系统和温度监控系统[2],但冷却和温控系统也存在出现故障的风险,比如冷却系统泄露等情况[3]。因此,对阀厅设备的实时监控和定期巡视都必不可少。
而在传统的智能巡检机器人系统中,由于设备结构复杂多样,安装设备时候会不可避免的出现遮挡的情况,因此测温只是针对设备整体的测温。基于此种情况,研究能满足精确测温的方法对智能巡检机器人系统的发展具有很大的意义。本文的目的就在巡检机器人系统可对阀塔等阀厅内设备进行大范围、多角度检测的基础上,研究了一种测温精度更高的方法,以满足能自动进行模式识别和故障诊断,为阀厅内设备的运行状态提供客观的判断依据[4-5]。
1 图像预处理
1.1标定待检测区域
为了定位待检测区域,我们首先对已有图像中目标进行标定,即标准图像进行标定。标定的方式是用矩形把待检测区域标注出来,以得到设备在图像中的相对位置。
1.2图像滤波
为了使待检测的设备更加清晰,需要对智能巡检机器人采集到的图像进行预处理。为了除去非均匀光照的影响,突显图像中的细节部分,本文采取在频域空间建立同态滤波器的方法对存在光照不足或光照变化的图像进行预处理,来消减由于光照因素导致的图像质量下降,同时增强图像中感兴趣的景物区域,从而实现在很大程度地保留了图像原貌,且同时增强了图像细节。同态滤波是一种比较特殊的滤波方法,其通过在频域空间压缩图像的亮度范围和增强图像的对比度来改善图像质量,并能减少低频、增加高频。因此,能降低光照变化同时锐化边缘或细节。
2 图像配准
2.1配准算法选择
通常常见的图像配准方法主要分两类:基于图像灰度的图像配准方法和基于图像特征的图像配准方法。
基于灰度的图像配准方法通常是运用整个图像所携带的全部灰度信息来构建图像之间的相似性度量,然后通过合适的搜索算法,找寻能使相似性度量值达到最大或最小时的变换模型的参数值。基于特征的图像配准方法通常首先获取图像中的稳定特征,然后利用这些稳定的特征来进行图像间的匹配,从而获取最后的图像配准。在这种方法中,所获取的稳定特征分两种:全局特征和局部特征。局部特征具有较强的鲁棒性,因为它是局部提取的有用特征描述子,而全局特征对图像的表述过于简单[6]。
对于图像结构信息充足且图像中物体容易检测和区分的情况,宜采用基于特征的配准方法,但不足是提取的特征结果受图像质量和内容的制约。图像的本质特征主要包括边缘、纹理和轮廓等。同时,同一个物体在不同的波段总会具备类似的特征,因此特征具有高度相关性。基于特征的配准方法能够获取到图像中不会因为平移、光照和旋转等因素影响而改变的特征,这些稳定的特征主要包括点特征、线特征和区域特征等不同类型。
景物的辐射信息通过红外光反应,所以,红外图像配准不仅要把图像的尺寸变化、旋转变化和仿射变形考虑在内,还必须要考虑因成像机理而产生的其他因素,例如灰度差异,相似几何特征的难以提取,对温湿度的不同反应等。由于两幅红外图像间的灰度差异特别大,且像素灰度间没有明显的相关性,所以本文采用的是基于特征的图像配准方法。
2.2图像多尺度表示
多分辨率方法适用于应用于计算图像数据的特征。其中,高斯卷积核就是实现多分辨率图像变换的线性核[7]。函数L(x,y,σ)为图像的多分辨率定义,其使用函数G(x,y,σ)和一幅输入图像I(x,y)之间的卷积运算,即
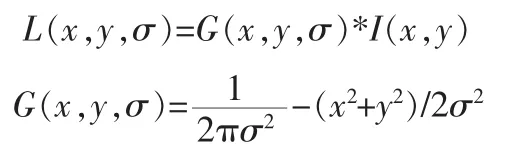
上式中,(x,y)表示图像的像素坐标,σ表示高斯方差。
因此,该方法使得特征同时具备优良的稳定性以及独特性,便在高斯函数差分尺度空间和图像的多维平面空间一起检测局部空间的极值,并以这样的极值为特征点[7]。不相同的尺度的高斯核的差分就是DoG算子,即

在上式中,k表示两个相似尺度的比例。
2.3SURF算法
SURF算法是对SIFT特征匹配算法的一种改进,提高了算法的执行效率。SURF算法的具体实现步骤是:
1)建立Hessian矩阵。SURF算法的核心步骤是建立Hessian矩阵,函数f(x,y)的偏导数构成Hessian矩阵H,则
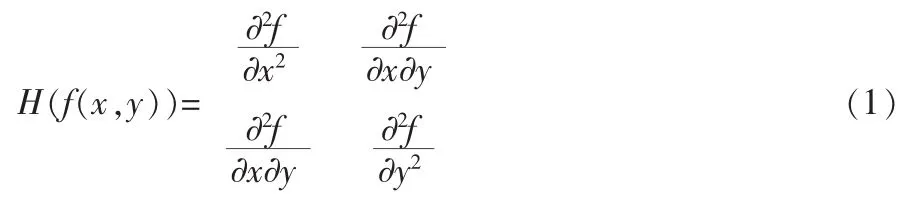
矩阵H的判别式为:

判别式det(H)的值就是矩阵H的特征值,依据det(H)取值的正负来判断是不是极值点,继而将所有点进行分类。
SURF算法中,函数值f(x,y)表示图像的像素,(x,y)则是对应像素的空间坐标。为计算出矩阵H中的3个元素Lxx(X,t)、Lxy(X,t)、Lyy(X,t),滤波器选择的是二阶标准的高斯函数,使用标准核间的卷积运算得到二阶偏导数,进而可得到矩阵H。

其中,

在(4)中,G(t)为高斯核,F(X)为图像表达式。

函数G(t)由(5)得到,g(t)是高斯函数,t是方差。Lxx(X,t)、Lxy(X,t)、Lyy(X,t)是图像在不同的尺度下的表达式,是由表达式(4)得到。
2)建立尺度空间。图像F(X)在不相同尺度下的表示就是这幅图像的尺度空间,可由表达式(4)利用与高斯核G(t)的卷积来计算,图像的大小通常由σ来获得。SURF算法是根据SIFT算法的尺度空间的理论上增加了图像核的方法,该算法可在尺度空间中的多层图像被同时进行计算,而不必再对图像二次抽样,从而提高了计算效率。图1中的左图像金字塔结构是由传统方式建立的,本方法中图像的大小是在不断变化的,同时本算法重复地使用高斯函数对每一层图像进行平滑。图1中的右图表示SURF算法中建立的金字塔,该金字塔中的滤波器的大小是不断变化的,原始图像是保持不变,从而提高了效率。
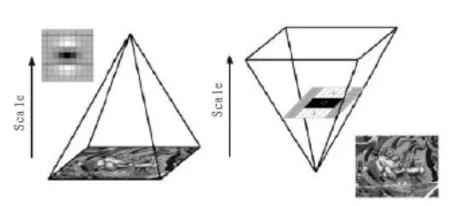
图1 图像滤波金字塔
3)精确定位图像中的特征点。特征点定位过程中,丢弃掉小于预设极值的每个取值,经过多次增加极值来使检测得到的特征点的数目减少,直到最后仅有几个特征最强的特征点被检测到。在检测的过程中,采用同当前尺度层的图像解析度同样大小的滤波器,如图2中所示,示例中采用的是3×3的滤波器。在对尺度空间中的极值进行检测时,图示中用叉号标记的像素比图中同尺度的相邻的8个像素和上下相邻的两个尺度对应处的2*9个像素(即用绿色标记的像素)的值都要大[8],目的是要保证在二维的图像空间以及尺度空间均能检测出局部区域的极大值,则该极大值即为该区域的特征点。
4)确定特征点处的主方向。为了使算子具有旋转不变的特性,该算法以特征点所在位置为中心,以6 s(s表示该特征点所在的尺度值)为半径,计算此圆所包含区域中的点分别在x,y方向上的Haar小波响应,其中Haar小波边长为4 s。与此同时把高斯权重系数赋给这些响应,以便使得响应的贡献随与特征点间的距离大小呈反比;然后将60°区域里的响应通过相加运算获得新的矢量;最后选取整个圆形区域中最长矢量的方向作为此特征点的主方向,如图3所示。
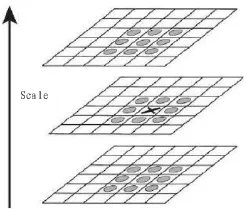
图2 检测特征点
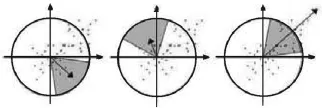
图3 确定的主方向
5)生成特征点描述子。首先以特征点为中心,将坐标轴旋转到特征点的主方向,然将特征点作为中心选取一个8×8的方形窗口。采用高斯窗口对邻域中的向量进行加权计算,最后通过在每一个4×4的小块区域里计算获得8个方向上的梯度方向直方图,从而绘制出每一个梯度方向上的累加值,继而就形成一个种子点。每个特征点是由2×2个种子点构成,并且每一个种子点都含有8个方向上的向量信息[8]。该种方法是将邻域中的方向性信息相联合加强算法的抗噪声性能,同时为定位存在误差的特征匹配算法提供较好的容错性。
在实际计算过程中,采用4*4个种子点来描述每一个关键点以便加强匹配的稳定性,这样每一个特征点就采用128维的向量。来表示。通过归一化特征向量的长度,便可根据两幅图像整体的偏移量,偏移后的以去除掉由光照变化所带来的影响。
2.4SURF特征点的匹配
在获取了两幅图像的SURF特征向量之后,这两幅图像中关键点相似性的判断度量用关键点特征向量的欧几里得距离来代替。依据最近邻与次近邻特征点的欧几里得距离之间的比值,选取可靠性相对比较高的匹配点,并取该匹配点作为求得两幅图像计算参数的确定点。先选取左图中的一个关键点,再找出这一关键点与右图中距离最近的两个关键点,在得到的这两个关键点中,若最小的距离除以次小距离小于已设置的阈值,则认为这一对匹配点。若降低这个阈值,SURF匹配点数量通常会减少,其优点是稳定性增加。
3 实 验
采用FLIR红外摄像机,采集的图像大小为320*240,对同一位置的两幅有偏差的图像进行配准实验,由于文中已标定出待检测设备的位置,并存入数据库。所以,根据整幅图像的偏移量便可计算出设备位置。结果如图4所示。
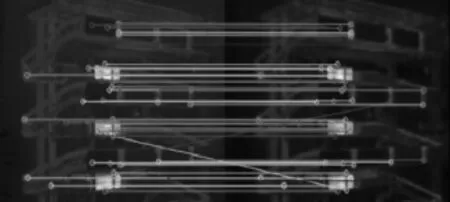
图4 滤波后的两幅图像进行配准
待检测图像,如图5所示。

图5 移动后的待检测图像
4 结束语
文中提出了一种基于同态滤波的SURF特征红外图像配准方法,解决了电力巡检机器人在阀厅内移动检测时,由于产生图像偏移导致的无法精确测温的问题。对比试验结果显示,经过同态滤波的方法处理过的红外图像,特征点更加明显,比较适合配准算法,从而可较为准确定位待检测设备。由于有的阀厅设备结构简单,表面光滑,通常提取不到足够的特征点,这说明本算法有其局限性,在实际配准过程中,可综合使用不同的配准算法以获得更好的配准结果。
[1]王华锋,陈龙龙,林志光,等.±800 kV特高压直流输电换流阀控制保护系统工作原理及其工程应用[J].电力建设,2013,34(4):32-36.
[2]许根富,尚立新.高压晶闸管换流阀外水冷系统分析[J].中国电力,2009,42(12):42-44.
[3]姚其新,饶洪林.换流站阀水冷系统隐患分析及治理[J].华中电力,2010,23(5):56-58.
[4]冯杰,陈圣俭,陈东.图像识别技术在换流站监控系统中的应用[J].电网技术,2010,34(2):174-178.
[5]衡晓鹏,牛英俊.变电站自动化系统中以太网通信模块设计[J].电子科技,2006(1):36-39.
[6]Mokhtarian F,Suomela R,Robust image corner detection throughcurvaturescale-space[J].IEEETransactions on Pattern Analysis and Machine Intelligence,2010,20(12): 1376-1381.
[7]Schaffalitzky F,ZissermanA.Multi-Viewmatching for unordered image sets,"Proc.seventh europeanConf[J]. Computer Vision,2002:414-431.
[8]Mikolajczyk K,Schmid C.Indexing based on scale invariant interest points,proc.Eighth Int'l conf[J].Computer Vision,2007:525-531.
Infrared imaging equipment positioning in the intelligent inspection robot of valve hall
ZHU Jing,SUN De-li,SUN Yan-he
(State Grid Electric Power Co.overhaul Liaoning Province Branch,Shenyang 110000,China)
In order to realize accurate temperature-measuring in the intelligent inspection robot of valve hall,we need accurate positioning for theequipmentin infrared image,a newmethod ofequipmentpositioning in infrared image put forward. First,making pre-processing to the standard infrared image,and then,using themethod of SURF(Speeded Robust Features)to extract the features ofwhole standard image,finally,matching the features of standard image and the detective image and the detective equipmentwillbe positioned accurately.Testproves that themethod ofequipmentposition in infrared image has a good effectand high precision.
valve hall;the intelligent inspection robot;SURF;equipment position
TN0
A
1674-6236(2016)19-0152-03
2015-09-18稿件编号:201509130
朱静(1964-),男,辽宁抚顺人,硕士,高级工程师。研究方向:电力系统直流管理。
猜你喜欢
中学生数理化·中考版(2022年9期)2022-10-25
小哥白尼(军事科学)(2022年2期)2022-05-25
小天使·二年级语数英综合(2019年4期)2019-10-06
红领巾·萌芽(2019年8期)2019-08-27
小学生学习指导(低年级)(2019年6期)2019-07-22
当代陕西(2019年10期)2019-06-03
中国与非洲(法文版)(2017年10期)2017-11-23
数学小灵通·3-4年级(2017年9期)2017-10-13
CHIP新电脑(2016年3期)2016-03-10
电影故事(2015年16期)2015-07-14
