电动汽车永磁驱动电机控制器仿真设计
2016-11-08 10:20孙登辉
决策与信息 2016年27期
孙登辉
江苏大学 江苏镇江 212013
电动汽车永磁驱动电机控制器仿真设计
孙登辉
江苏大学 江苏镇江 212013
本文基于Matlab设计了永磁无刷直流电机控制器。以转速、电流双闭环控制为控制策略,利用Simulink构建系统控制仿真模型,设计过程中提出了通过调节滞环宽度减少转速波动、利用查表法实现反电动势求取的想法。调试确定转速、电流控制器参数,结合汽车运行工况,测试了控制器在不同速度与负载下的性能。结果表明,所设计控制系统在精度、响应时间、稳态误差等方面符合设计要求。
永磁无刷直流电机;PID控制;Matlab仿真
一、引言
电动汽车的驱动电机主要有永磁无刷电机、感应电机、有刷直流电机和开关磁阻电动机。其中永磁无刷直流电动机因其卓越的性能和优势倍受关注,尤其是伴随着永磁材料、计算机自动控制技术、大功率半导体和电力电子技术的快速发展,永磁无刷直流电机也得到迅速发展。对永磁无刷直流电机的控制至关重要,利用计算机仿真技术,对控制系统进行数字仿真,可以大大加快其开发速度。
二、永磁无刷直流电机(BLDC)数学模型
(一)永磁无刷直流电机的结构原理。永磁无刷直流电机主要由电机本体、转子位置传感器和逆变器构成。直流电源通过电子开关向电动机定子绕组供电,位置传感器检测电动机转子位置并发出电信号控制逆变器的导通或关断,使电动机转动。永磁无刷直流电动机的基本物理量有反电动势、电枢电流、电磁转矩和转速等。
(二)永磁无刷直流电机的数学模型。为了简化分析,采用电机本身的相变量法建立数学模型,采用分段线性表示感应电动势,并做如下假设:a)三相定子Y形连接,完全对称;b)忽略齿槽效应,不考虑磁路饱和;c)忽略磁滞、涡流、温度等影响。
1、电压平衡方程

式1.1为定子电压平衡方程,其中,ua、ub、uc为三相定子电压;ea、eb、ec为三相定子的反电动势;ia、ib、ic为三相定子相电流;L为三相定子自感;M为三相定子绕组之间的互感;R为三相定子绕组

电机的电磁转矩和运动方程为:


3、永磁无刷直流电机控制系统的Matlab模型
电机控制系统采用转速和电流双闭环调速,转速环由PID调节器构成,电流环由电流滞环调节器构成。
(三)电机本体及反电动势
电机本体模块根据输入的位置信号Pos__D_Dd__ea、eb、ec,再由式1.1获得三相电流信号ia、ib、ic利用Lookup Table模块实现反


表2 .1 位置信号与单位反电动势的关系
(四)电流滞环控制与速度调节模块
电流滞环模块采用滞环控制原理来实现电流的调节,此模块输入为三相参考电流和三相实际电流,输出为逆变器的控制信号。速度调节采用PID算法,输入参考转速与实际转速之差,输出三相参考电流幅值 。
(五)参考电流及电压逆变器模块

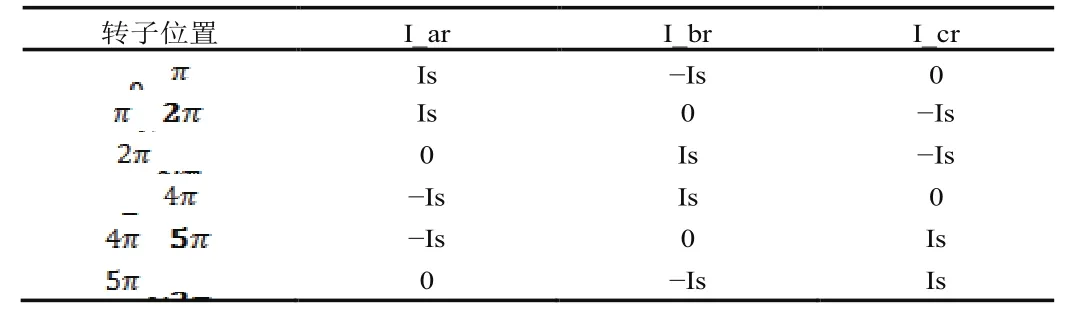
表2 .2 转子位置与三相参考电流对应关系
(六)转矩及转速
根据式1.2和式1.3,建立转矩和转速计算模块。
三、控制系统仿真结果
(一)参数设定
电机各部分参数设置如下:定子绕组每相电阻;定子相绕组
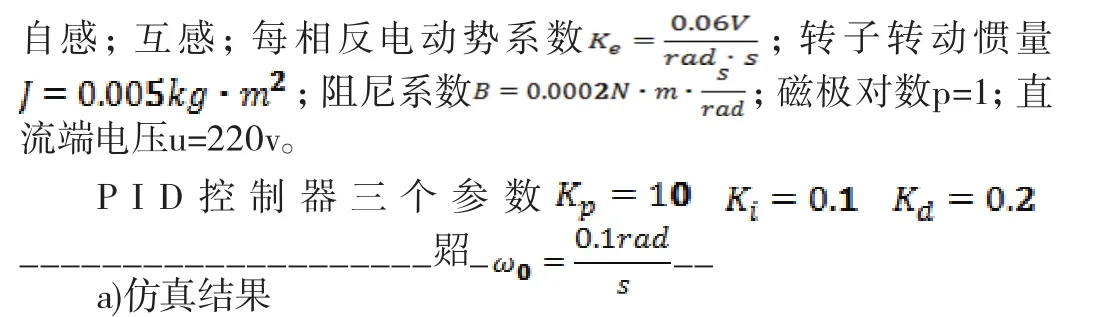
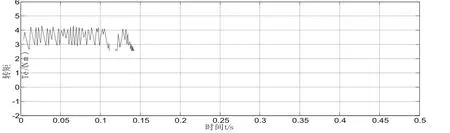
图3 -1 参考转速的转矩响应曲线
四、结论
本文采用了经典的速度、电流双闭环控制策略,用常见的PID速度控制和电流滞环控制仿真设计了无刷电机控制器。仿真结果表明:各参考量波形符合理论分析,系统能够平稳运行,具有较好的静、动态特性,所设计控制系统的精度、响应时间、稳态特性及跟踪性能良好。在对三相梯形反电动势、三相参考电流逆变器等进行建模的过程中,本文采用的查表法和S函数充分发挥了Matlab的灵活性,对电机控制器的开发调试有借鉴意义。但对于较大的力矩负荷该系统响应效果不佳,需要进一步的研究分析或寻求新的控制策略。
猜你喜欢
防爆电机(2022年4期)2022-08-17
汽车实用技术(2022年12期)2022-07-05
防爆电机(2022年3期)2022-06-17
防爆电机(2021年6期)2022-01-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
防爆电机(2021年1期)2021-03-29
电子制作(2019年23期)2019-02-23
电子制作(2019年23期)2019-02-23
电机与控制学报(2018年9期)2018-05-14