非结构化道路图像光照不均校正方法*
2016-11-07 05:47:30金守峰田明锐
计算机与数字工程 2016年10期
金守峰 范 荻 田明锐
(1.西安工程大学机电工程学院 西安 710048) (2.长安大学高速公路施工机械陕西省重点实验室 西安 710064)
非结构化道路图像光照不均校正方法*
金守峰1范荻1田明锐2
(1.西安工程大学机电工程学院西安710048) (2.长安大学高速公路施工机械陕西省重点实验室西安710064)
为了克服智能车辆在非结构化道路中所获取的道路图像存在整体亮度不均匀、背景复杂等问题,提出基于函数逼近理论的拟合校正算法。通过正交基函数拟合估计道路图像中的照度偏差,利用除法运算对道路图像进行拉伸,有效地对图像进行校正。实验结果表明,该方法可以有效消除光照不均所引起的图像背景亮度不均匀现象,增强了图像的对比度,同时对道路序列图像相邻帧处理的结果具有较好的一致性。
非结构化道路; 光照不均; 基函数拟合; 图像校正
Class NumberTP391
1 引言
智能车辆是一种集环境感知、动态决策与规划、行为控制与执行等多项功能于一体的高智能化系统。通过车载视觉系统获取周围环境信息来确定车辆的运动参数及位置信息[1~3]。由于非结构化道路的表面覆盖物多种多样、表面纹理特征不均匀、道路平整度较差,使得道路表面对光线的吸收与反射的性能不同,影响道路图像背景的光照强度,导致图像背景亮度不均匀,图像局部的灰度值低或出现高光现象[4],使局部信息无法获取,降低了图像的质量,增加了图像分割及后续特征提取的难度。
文献中通过设计合适的滤波器,在频域上,削弱低频成分,并适当增强高频分量,从而达到克服非均匀光照场[5~10],但由于频域的滤波会在图像边界产生模糊效应,并在大量的时频转换上耗费的时间较多,不适合工业视觉在线检测系统。李莉等提出了改进的图像背景校正算法,直接根据降质道路图像的特征进行处理,虽然可以提高图像的清晰度,但由于没有考虑成像机理,不可避兔地会产生图像失真问题,且无法保证处理后相邻帧图像的一致性[11]。
本文在照度-反射模型的基础上,提出了函数逼近理论的基函数拟合算法,通过B样条基函数拟合估计图像中的背景照度偏差,利用除法运算对原图像进行拉伸,有效地对图像进行了校正。
2 函数逼近理论的图像校正模型
在照度-反射模型中,图像I(x,y)可以表示为照明分量与反射分量的乘积形式I(x,y)=i(x,y)×r(x,y),其中,照明分量i(x,y)频谱集中在低频段,反射分量r(x,y)频谱集中在高频段[12]。本文在照度-反射模型的基础上,设真实道路场景为f0(x,y),由于道路材料性能、外界照明光源的安装角度和噪声等因素所引起的道路图像背景亮度不均匀,将其看作为照度偏差B(x,y),则车载视觉系统采集的道路图像f(x,y)表示为
f(x,y)=f0(x,y)×B(x,y)
(1)
由于照度偏差在空间域中的变化缓慢,其照度场比较光滑,根据函数逼近理论,任何函数都可以由基函数的线性组合表示来逼近,因此可以用一组正交且光滑的基函数来拟合照度偏差B(x,y)[13~15]。道路图像f(x,y)中所有像素点的二维坐标构成了一个矩形网格,每个像素的灰度值对应于网格点上的值,因此本文选用具有良好的连续性、分段性、调整性等优点的B样条基函数拟合照度偏差B(x,y)。二维B样条曲面拟合同时对图像的行、列像素进行拟合,获得图像照度偏差为
(2)

将式(2)带入式(1)中得到的道路图像为
f(x,y)=f0(x,y)×B(x,y)
(3)

(4)
3 实验分析
在实验中,设计开发了基于四轮车的车载视觉测速平台如图1所示。实验平台由车体、视觉采集与计算机图像处理系统几个部分组成。
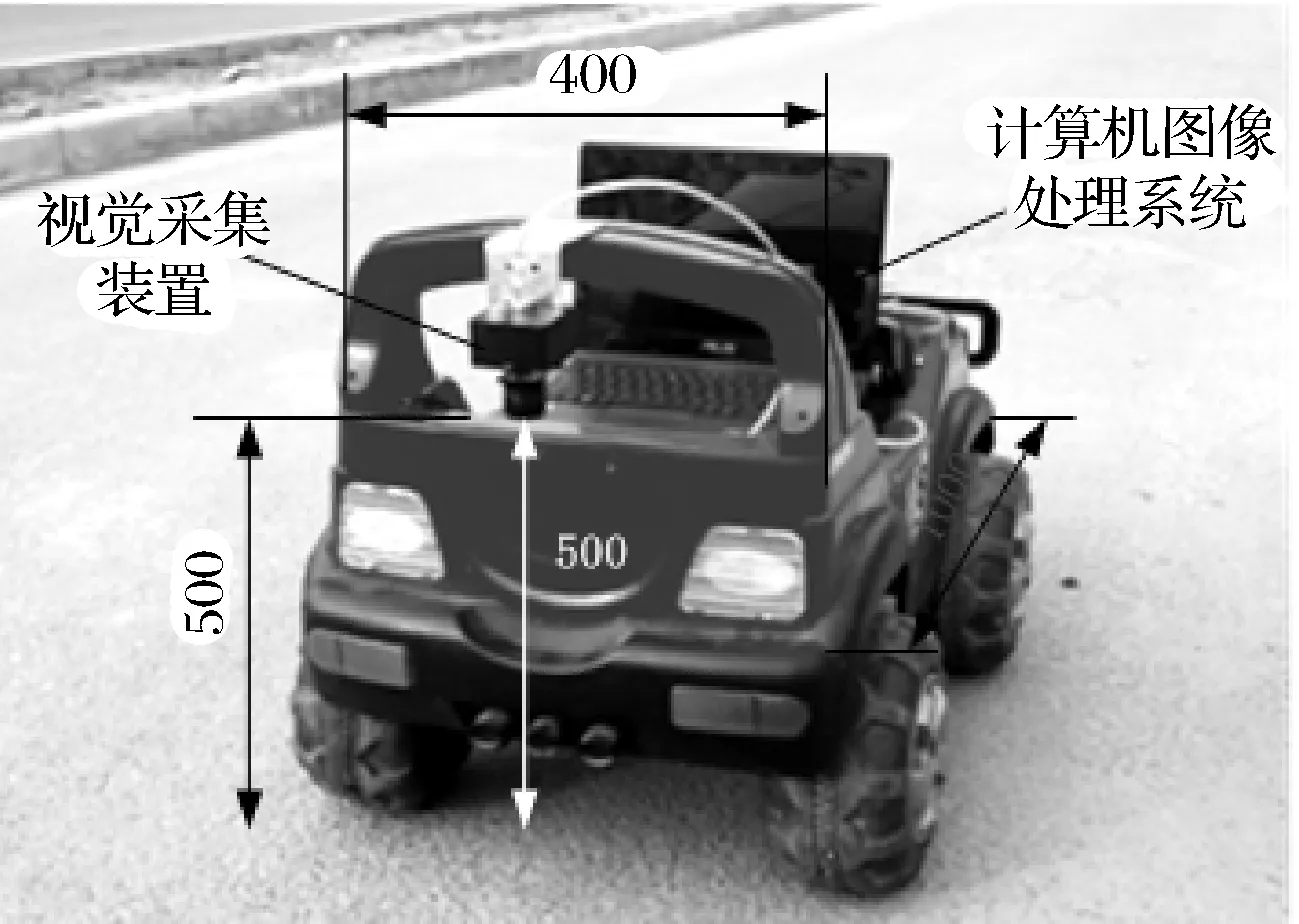
图1 四轮小车移动平台
实验平台的车体尺寸为1000 mm×400 mm×500 mm,四轮直径为260 mm,材质为硬质塑料,承重后不变形。前轮为转向轮,后轮为驱动轮,由直流电机驱动。实验所用的地面为干燥的沥青混凝土地面,以10 m作为实验长度,两边分别延伸2 m作为助跑区。车载视觉采集系统中FC-IE工业相机光轴垂直于道路,在室外采用自然光作为光源采集道路图像,视场高度H为500 mm。
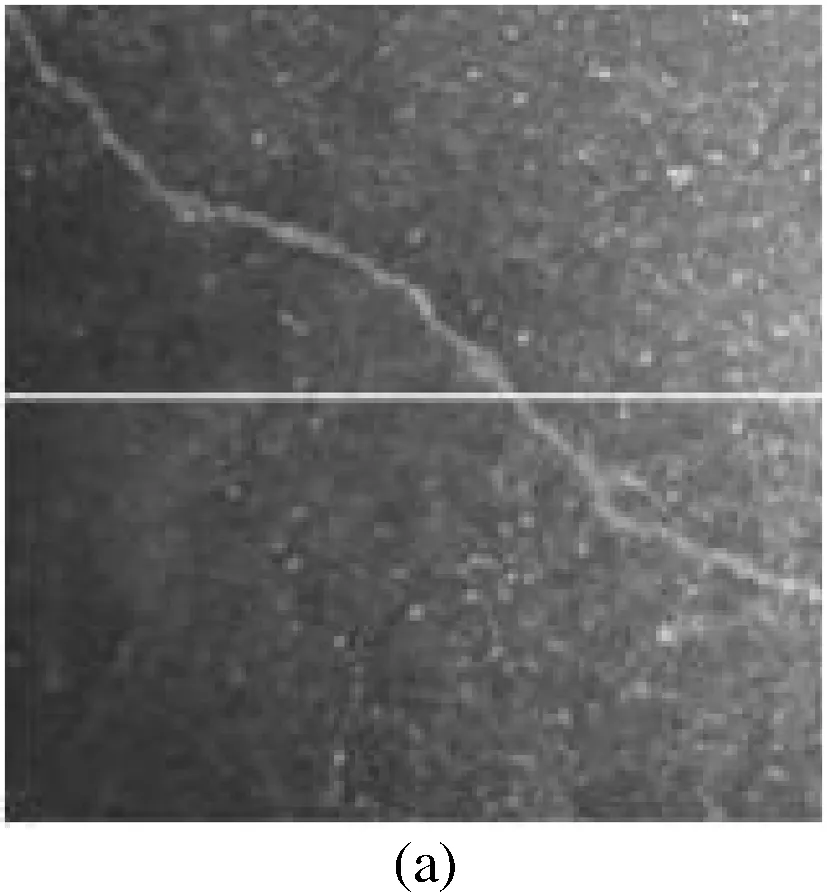
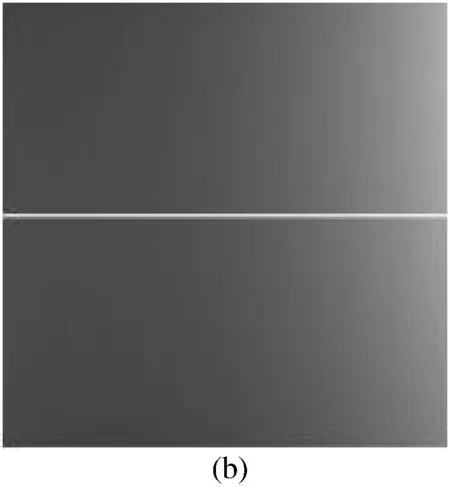

图2 道路图像校正

对原图采用同态滤波及本文基函数拟合法处理的结果及其直方图如图3所示。同态滤波处理后,图像的光照不均基本消除,但直方图显示图像整体灰度偏暗。采用基函数拟合法有效地消除了图像背景亮度不均匀的影响,同时图像的对比度有明显增强,从对应的直方图中可以看出,图像的灰度分布较为均匀。



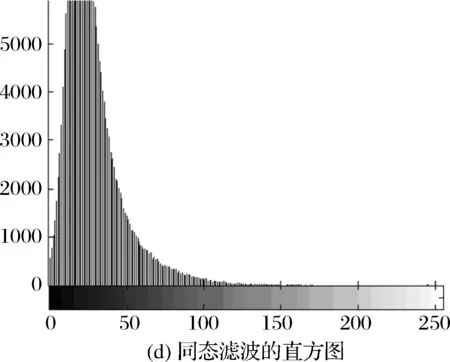
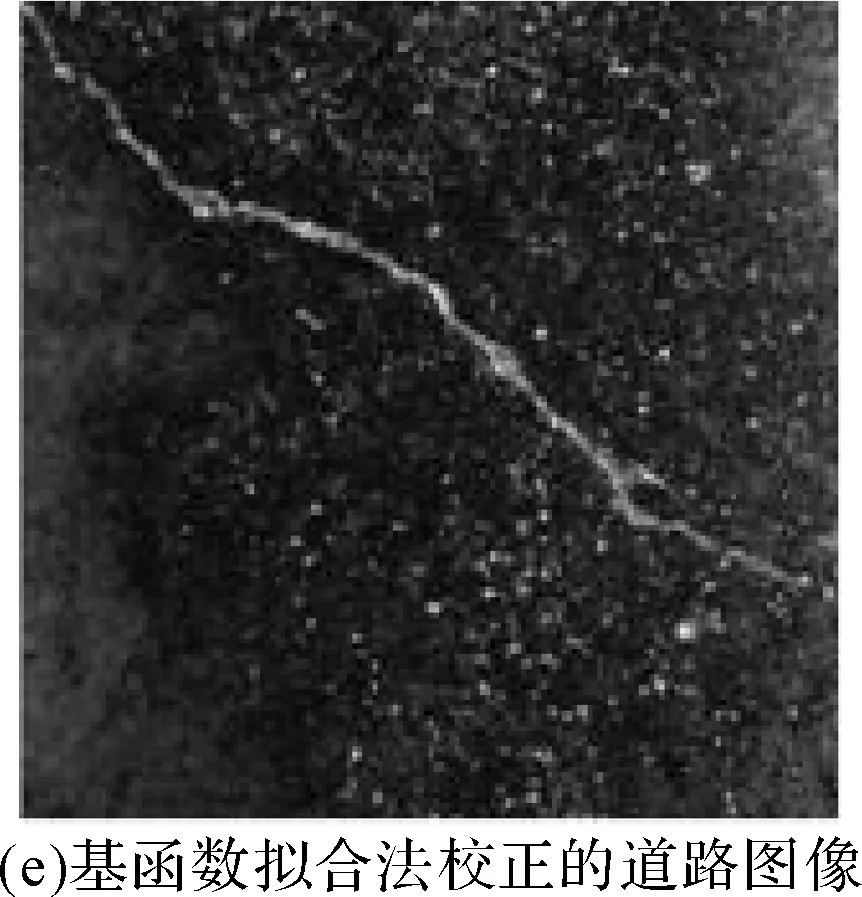
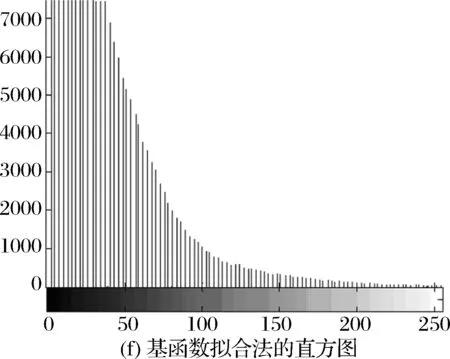
图3 道路图像处理结果及其直方图
以下对图3中两种方法处理的道路图像,采用图像的标准差、信息熵进行定量评价。标准差反映了图像的细节信息,其值越大,细节越突出。图像的信息熵是衡量图像信息丰富程度的重要指标,图像的熵值越高则表明其所包含的信息越丰富。从表1得知,经两种方法处理后,同态滤波的标准差增加了11.7%,基函数拟合法的标准差增加了23.4%,表明校正后突出了图像的细节信息。同态滤波的信息熵降低了1.3%,而基函数拟合法的信息熵增加了26.6,表明基函数拟合法校正后图像的信息更加丰富。

表1 定量评价
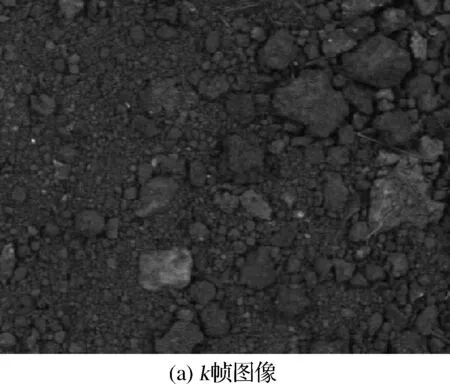
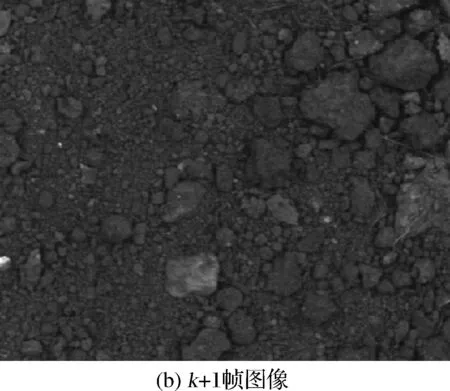

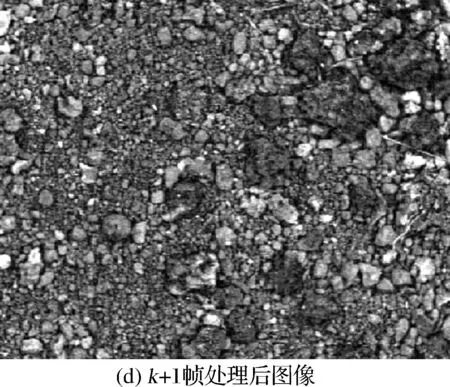
图4 道路序列图像的处理结果
四轮小车移动平台所获取的道路序列图像如图4(a)和(b)所示,相邻帧图像处理的一致性直接影响后续的图像特征点提取、目标识别与跟踪等。采用基函数拟合法处理后的结果如图4(c)和(d)所示,处理后的图像背景亮度得到校正,清晰度增加且具有良好的一致性。
4 结语
针对四轮小车移动平台的车载视觉系统所获取道路图像由于自然光照明引起的图像背景亮度不均匀、对比度低的特点,本文在照度-反射模型的基础上提出了函数逼近拟合算法。通过B样条基函数拟合照度偏差,利用除法运算对道路图像进行拉伸,可以有效地对道路图像整体亮度不均匀进行校正。通过实验结果对比分析,在直方图中可以看出本文基函数拟合法扩大了灰度分布范围,增加了图像的对比度;图像信息熵的数值增大表明在扩大的灰度范围内获得了较多的图像信息;标准差的数值增加则更突出了图像的细节信息。同时基函数拟合法对道路序列图像的处理也具有良好的一致性。
[1] 徐友春,李克强,连小珉,等.智能车辆机器视觉发展近况[J].汽车工程,2003,25(5):438-443.
XU Youchun, LI Keqiang, LIAN Xiaomin, et al. The Recent Development of M achine Vision for Intelligent Vehicles[J]. Automotive Engineering,2003,25(5):438-443.
[2] 高俊钗,宁江坤.自主行驶车辆的避障控制算法研究[J].计算机与数字工程,2016,316(2):203-206.
GAO Junchai, NINU Jiangkun. Obstacle Avoidance Control Algorithm for Autonomous Vehicles[J]. Computer & Digital Engineering,2016,316(2):203-206.
[3] 孙涵,任明武,唐振民,等.基于机器视觉的智能车辆导航综述[J].公路交通科技,2005,22(5):132-135.
SUN Han, REN Mingwu, TANG Zhenmin, et al. A Survey of Machine Vision Based Intelligent Vehicle Navigation[J]. Journal of Highway and Transportation Research and Development,2005,22(5):132-135.
[4] 梁琳,何卫平,雷蕾,等.光照不均图像增强方法综述[J].计算机应用研究,2010,27(5):1625-1628.
LIANG Lin, HE Weiping, LEI Lei, et al. Survey on enhancem ent m ethods for non-un iform illum ination image[J]. Application Research of Computers,2010,27(5):1625-1628.
[5] 黄赞,张宪民,陈忠基.基于同态滤波的鲁棒多尺度微运动测量算法[J].仪器仪表学报,2011,32(2):426-431.
HUANG Zan, ZHANG Xianmin, CHEN Zhongji. Robustm ulti-scalemicro-motion measurem ent algorithm based on hom on orphic filtering[J]. Chinese Joumal of Scientific Instrument,2011,32(2):426-431.
[6] VOICU L, MYLER H R, WEEKS A R. Practical con-siderations on color image enhancem ent using hom om or-phic filtering[J]. Joumal of Electronic Imaging,1997,6(11):108-113.
[7] BRNKMAN B H, MANDUCA A, ROBB R A. Optimized hom om orphic unsharp masking for MR grayscale in homogeneity correction[J]. IEEE Transactions on Medical Imaging,1998,17(2):161-171.
[8] 罗海霞,刘斌,龙永红,等.同态滤波在光照补偿中的应用[J].湖南工业大学学报,2008,22(5):23-27.
LUO Haixia, LIU Bin, LONG Yonghong, et al. Application of Homomorphic Filtering in Illumination Compensation[J]. Journal of Hunan University of Technology,2008,22(5):23-27.
[9] Kobus Barnard, Lindsay Martin, Adam Coath. A comparison of computational color constancy algorithms-Part Ⅱ; Experiments with image data[J]. IEEE Trans. Image Processing,2002,11(9):985-995.
[10] Barnard K, Cardei V, Funt B. A comparison of computational color constancy algorithms-Part Ⅰ; Methodology and experiments with synthesized data[J]. IEEE Trans. Image Processing,2002,11(9):972-984.
[11] 李莉,孙立军,陈长.改进的路面图像背景校正算法[J].同济大学学报(自然科学版),2011,39(1):80-84.
LI Li, SUN Lijun, CHEN Chang. Modified Background Correction Algorithms for Pavement Images[J]. Journal of Tongji University(Natural Science),2011,39(1):80-84.
[12] 李江波,饶秀勤,应义斌.基于照度-反射模型的脐橙表面缺陷检测[J].农业工程学报,2011,27(7):338-342.
LI Jiangbo, RAO Xiuqin, YING Yibin. Detection of navel surface defects based on illumination-reflectance model[J]. Transactions of the CSAF,2011,27(7):338-342.
[13] 王娜,刘江,张世荣.截面测量数据的B样条曲面拟合[J].机械设计与制造,2007,8(8):151-153.
WANG Na, LIU Jiang, ZHANG Shirong. Bicubic B-spline surface fitting based on data from section easurement[J]. Machinery Design & Manufacture,2007,8(8):151-153.
[14] 陈国振,刘静华.B样条曲面自适应拟合算法[J] 北京航空航天大学学报,2007,33(2):210-213.CHEN Guozhen, LIU Jinghua. Auto-adapted fitting algorithm of B-spline surface objects[J]. Joumal of Beijing University of Aeronautics and Astronautics,2007,33(2):210-213.
[15] 隽峰,黎小间,高建华,等.B样条曲面拟合方法在人体测量中的应用[J].计算机应用研究,2007,24(5):183-185.
JUAN Feng, LI Xiaojian, GAO Jianhua, et al. Application of B-spline Fitting Surface to M easure of Body[J]. Application Research of Computers,2007,24(5):183-185.
A Correction Method for Uneven Illumination of Unstructured Road Images
JIN Shoufeng1FAN Di1TIAN Mingrui2
(1. College of Mechanical and Electrical Engineering, Xi’an Polytechnic University, Xi’an710048) (2. Key Laboratory of Expressway Construction Machinery of Shaanxi Province, Chang’an University, Xi’an710064)
A function approximation theory fitting algorithm is proposed in order to overcome the presence of uneven illumination and the complex of background in road images acquired by intelligent vehicle on an unstructured way. The illuminance deviation in pavement imagesis estimateds through the orthogonal basis function fitting. The pavement images are stretched and corrected effectively by the division operation. The results show that this method can eliminate the uneven background brightness caused by the uneven illuminance effectively, enhance the image contrast, and have good consistency for the adjacent frame of the pavement image sequences.
unstructured way, uneven illumination, basis function, image fitting
2016年4月8日,
2016年5月24日
长安大学高速公路施工机械陕西省重点实验室开放基金(编号:310825161123)资助。
金守峰,男,博士,副教授,研究方向:机器视觉、机器人视觉控制。范荻,女,硕士研究生,研究方向:机器视觉。田明锐,男,博士研究生,研究方向:图像处理、工程机械机器视觉。
TP391
10.3969/j.issn.1672-9722.2016.10.034
猜你喜欢
北京测绘(2023年9期)2023-12-25 07:15:14
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14 03:54:42
光源与照明(2019年4期)2019-05-20 09:18:24
电子测试(2018年9期)2018-06-26 06:45:40
制造技术与机床(2017年7期)2018-01-19 02:30:00
软件(2017年6期)2017-09-23 20:56:27
计算机测量与控制(2017年6期)2017-07-01 16:24:14
火控雷达技术(2016年2期)2016-02-06 02:28:58
遥感信息(2015年3期)2015-12-13 07:26:52
江苏农业科学(2014年9期)2014-11-15 04:01:30