民用飞机主飞控作动系统同一舵面不同工作模式架构设计研究
2016-11-04 21:30王小英吕延平
科技视界 2016年23期
王小英+吕延平
【摘 要】主飞控作动系统在现有民用飞机上采用了不同工作模式,本文作者结合自身从事国内民机研发经历的从需求提出、初步设计及仿真分析确认的过程,比较了不同工作模式对主飞控作动系统设计和飞机的主要影响。
【关键词】作动系统;主-主模式;主-备模式
0 引言
民用飞机主飞行控制舵面一般指控制飞机俯仰、横滚和偏航的升降舵、副翼和方向舵舵面。根据安全性要求,同一主飞行控制舵面上一般采用2至3套独立的对应不同能源系统的作动系统控制舵回路。目前空客系列飞机[1],同一舵面上作动器控制舵回路主要采用了主-备(Active-Damp)模式,即一个作动器处于主动工作状态,另一个作动器处于阻尼状态;而波音系列飞机[2]主要采用了主-主(Active-Active)模式。本文结合主飞控作动系统设计过程和仿真,分析不同工作模式对舵回路产品设计和系统要求的影响。
1 主飞控作动系统典型架构
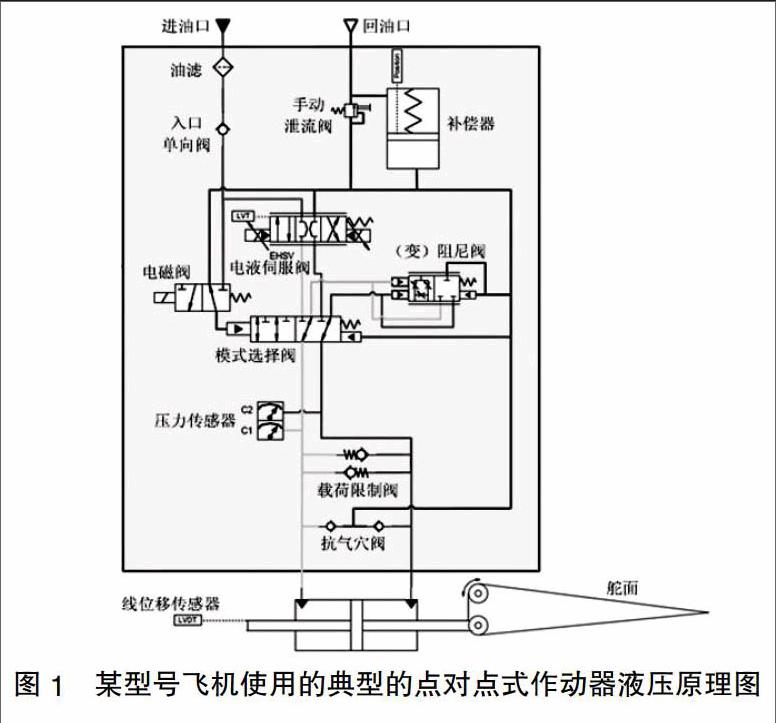
民用飞机主飞行控制作动系统(以下简称主飞控作动系统)控制的单个舵回路一般由控制器、作动器和控制对象(飞机舵面)组成。控制器负责接收来自主飞控系统输入控制指令和作动器位置传感器的反馈信号,形成误差指令信号并对其进行校正和放大以控制作动器实现对舵面的位置闭环控制,作动器作为执行机构接收控制指令驱动舵面。图1为某型号飞机使用的典型的点对点式电液伺服作动器液压原理图。
当电磁阀通电时,高压油驱动模态选择阀阀芯动作使其工作在左侧位置,电液伺服阀两个控制口经模态选择阀与作动筒两腔沟通,控制活塞杆运动,此时为主动模式;当作动器进油口失压或电磁阀断电时,模态选择阀阀芯在弹簧作用下工作在右侧位置,电液伺服阀与作动筒油路被切断,作动器两腔经模态选择阀和(变)阻尼阀构成阻尼回路,此时为阻尼模式。补偿器对阻尼回路进行补油,确保回路有足够的液压油来完成阻尼功能。对于有三个作动器控制的舵面,以某型号方向舵为例,考虑三套能源系统同时失效的概率小于1*10-9,作动器不再配置补偿器,(变)阻尼阀改为地面突风保护用的节流孔[3]。
图1 某型号飞机使用的典型的点对点式作动器液压原理图
2 主飞控作动系统关键设计及需求分析
主飞控作动系统主要实现舵面驱动控制和颤振抑制功能。驱动控制要求一般根据操稳特性提出,结合主飞控作动系统同一舵面不同工作状态可以对应不同的飞机操纵品质要求;而颤振抑制作为影响飞机安全的关键要求,则须考虑舵回路(作动器安装支架、作动器和舵面)最坏状态,即只有一个作动器处于主动状态或只有一个作动器连接舵面并处于阻尼状态下时仍需满足颤振抑制要求。在很多情况下,影响作动器设计的关键因素往往是刚度,因此下文对刚度进行简要分析。
在工程设计初期,针对作动器主动工作状态的颤振抑制要求往往先对舵面的自然旋转频率?棕0提出要求,初步确定作动器的设计后再根据作动器各设计参数建立的高保真模型检查确认是否满足动刚度需求。
3 同一舵面不同工作模式操纵性能仿真分析
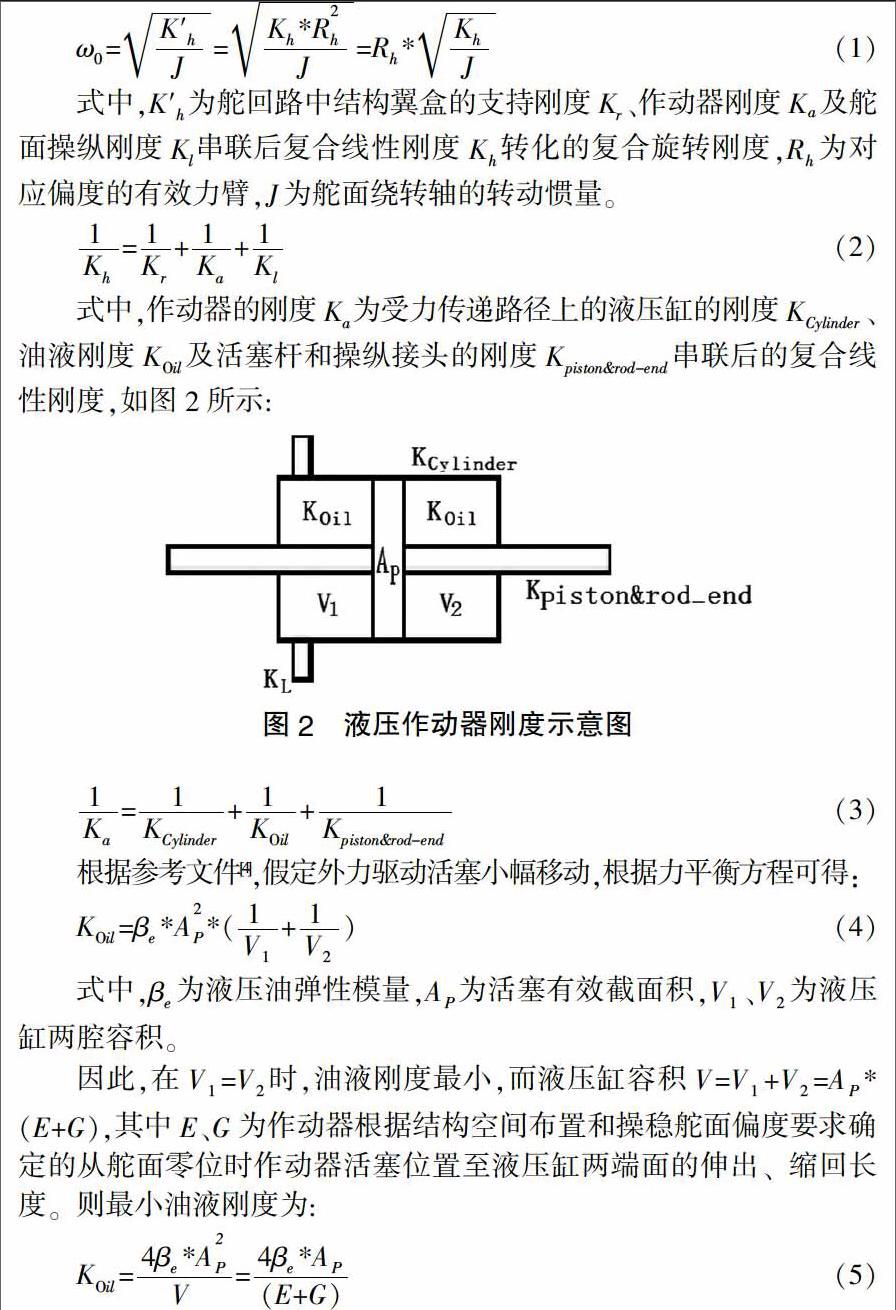
根据以上需求完成主飞控作动系统的主动工作和阻尼状态回路的关键元器件的参数设计和选择确认后,利用Matlab/Simulink建立作动器数学仿真模型、作动器结构支架模型和飞机舵面模型,进而建立整个作动系统的仿真模型用于对系统性能进行分析。作动系统仿真模型可用于分析作动系统的有载偏转速率、闭环动态特性、静刚度和动刚度等主要性能参数,结合以上分析,工作模式主要影响操稳特性,本文仅介绍有载偏转速率和闭环动态特性计算结果。图3所示为整个作动系统仿真模型中的部分作动器模型示意图(伺服阀、作动筒等)。
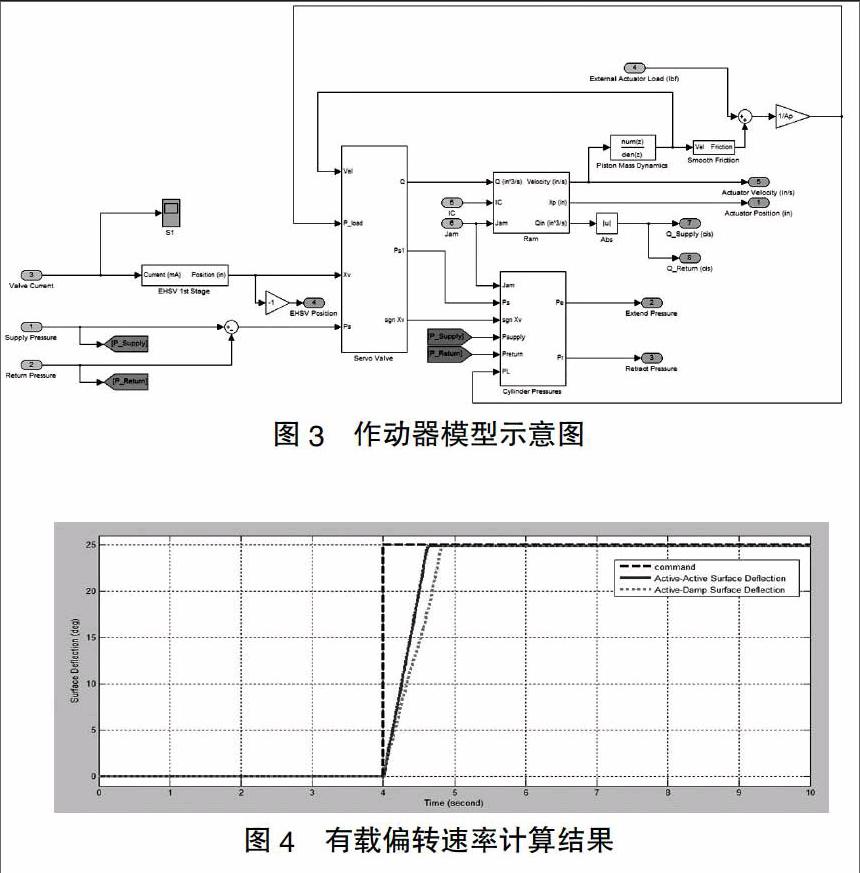
通过设置同一舵回路的两个作动器不同工作模式,利用仿真模型计算作动系统有载偏转速率和闭环动态特性等主要性能,如图4图5所示。
民用飞机作动系统对频率的要求一般低于15Hz,但在高频率段,可能出现图6所示的“尖峰”,此时需要根据各实际情况综合调整作动系统控制回路上增益以抑制“尖峰”。需要注意的是:控制器参数的调整是一个综合权衡的过程,如果过于抑制图6中的尖峰,会使控制单元中陷波器过多,进而影响系统动态性能。控制单元同样可以影响作动系统动刚度,在单纯调整控制参数的情况下,使动刚度变大系统稳定裕度会降低,反之亦然。因此,需要在详细分析作动系统性能基础上建立尽可能详细的数学仿真模型,通过大量的仿真计算,权衡各项控制参数和系统性能。
4 结论及展望
通过以上主飞控作动系统设计过程和仿真分析可知,同一舵面的多通道主飞控作动系统采用不同工作模式时操纵品质略有差异,一般都能满足民用飞机操纵的稳定性和快速响应特性要求。作动器活塞有效面积影响着主飞控作动系统整个舵回路上所有元器件的设计,当操纵铰链力矩作为活塞面积的决定因素时,采取主-主工作模式同时考虑一个作动器故障进入阻尼模式时降低操纵铰链力矩要求,可以有效减小作动器活塞面积,从而对主飞控作动系统和相应舵面结构减重带来很大益处。由于制造安装误差、传感器精度等影响,主-主工作模式的多个作动系统舵回路之间不能完全同步,从而产生多回路之间的力纷争引起结构局部疲劳,因此,主飞控系统需采取力纷争减缓算法及增加力纷争监控器以保护结构。
随着飞机超临界机翼的使用,主飞控作动系统可安装布置的空间变小,及系统复杂度和可实现能力的提高,同一舵面的主飞控作动系统对应飞机不同飞行工况时分别采用主-主和主-备工作模式将可能成为后续更多飞机的选择。
【参考文献】
[1]Airbus Company,A319/320 AIRCRAFT MAINTENACE MANUAL[M].Toulouse:Airbus Company,2005:3-4.
[2]Boeing Company,B737-600/700/800/900 AIRCRAFT MAINTENANCE MANUAL[M].Seattle: The Boeing Company,2001:11.
[3]刘彩志,田剑波, 王永熙. 方向舵地面突风阻尼特性研究[J].民用飞机设计与研究,2005.2:15-18.
[4]王永熙.飞机飞行控制液压伺服作动器[J].北京:航空工业出版社,2014,9.
[5]郭军,吴亚峰,储妮晟. AMESim仿真技术在飞机液压系统中的应用[J].计算机辅助工程,2006,1(15):42-45.
[责任编辑:汤静]