恶劣海况下船舶电力推进系统抗过旋控制研究
2016-11-04 12:35:42汪桐萱梁景凯曲延滨
舰船科学技术 2016年9期
汪桐萱,任 倩,梁景凯,曲延滨
(哈尔滨工业大学(威海)信息与电气工程学院,山东 威海 264209)
恶劣海况下船舶电力推进系统抗过旋控制研究
汪桐萱,任倩,梁景凯,曲延滨
(哈尔滨工业大学(威海)信息与电气工程学院,山东 威海 264209)
电力推进的船舶在恶劣海况下航行时存在较大扰动,螺旋桨不断进出水面,使船舶推进电机的转速和转矩过大从而造成机械损耗。为此,本文提出一种针对恶劣海况的船舶电力推进系统抗过旋控制策略,不同于平静海况的转速控制策略,考虑船桨通风状态以及损失的估算,对损失因子和估算转矩进行分析,验证抗过旋控制的可靠性。
船舶电力推进;恶劣海况;抗过旋控制;损失计算
0 引 言
电力推进是现代船舶推进方式之一,通过电动机直接或经减速齿轮装置带动螺旋桨推动船舶行进,目前已成为一种先进的推进方式[1]。而推进电机及其控制技术是船舶电力推进的关键技术之一,由于推进电机受外部负载扰动、对象建模不充分和非线性动态等不确定因素的影响,要获得高性能的转速控制系统,必须由先进的控制策略来解决这些不确定因素的影响。目前,常用的控制船舶推进系统的方法有模糊控制方法、神经元自适应 PID 方法、复合误差模型自适应方法等。模糊控制鲁棒性强,但是模糊控制属于有差控制,静态性能不够稳定。神经元自适应 PID 控制是一种与矢量控制相结合的控制方法,此控制方法有较好的自适应能力,抗干扰性能较好[2]。复合误差模型自适应方法的主要优点是具有很好的自适应性和稳定性[3-5]。
这些方法在一定程度上解决了不确定性对控制性能的影响,提升了系统抗干扰的能力。但当船舶遭遇恶劣海况时,螺旋桨会出现不断进出水面的情况,导致螺旋桨经历一个很大的负载瞬时变化,产生过大的转矩和转速,快速旋转的桨叶撞击水面,会导致机械传动机构损坏和桨叶的损坏,产生不必要的经济损失。只有适时根据海况调整控制策略,才能更好地解决所述的螺旋桨机械动态失衡问题。
鉴于目前针对船舶电力推进系统遭遇恶劣海况时的控制策略研究相对较少,本文提出一种恶劣海况下的船舶电力推进系统抗过旋控制策略,该控制方法能够有效抑制螺旋桨失载时螺旋桨飞车,保障推进传动系统的动态平衡,减少推进单元的机械损耗,有效实现船舶在恶劣海况中的安全平稳推进。
1 船舶电力推进系统模型建立
1.1船桨模型
螺旋桨特性是指螺旋桨转矩、功率与转速之间的关系曲线与桨的转动方向和水流入方向有关系。根据螺旋桨工作原理,螺旋桨实际推力、转矩分别与转速的关系为:

式中:KF为推力系数;KT为转矩系数;ρ 为海水密度;D 为螺旋桨直径;n 为轴的转速。
1.2轴动态模型
连接电机和螺旋桨轴的转矩平衡方程为:

式中:Tmp为轴上的电机转矩;Is为轴、螺旋桨、电机的转动惯量;ω 为轴的角速度;f(ω)为轴的摩擦力。
轴的摩擦力方程为:

式中:Kω为摩擦系数;Ts为静摩擦转矩常数。
1.3电机模型
永磁同步电动机具有磁通密度高、动态响应快、严格的转速同步性、更硬性的转速特性等优点,因此目前船舶电力推进系统大多采用永磁同步电动机作为推进电机[6-7]。
电机动态模型方程为:

式中:Tm为电机的转矩;tm为时间常数;Tcm为推进系统中电机需要的转矩。
2 恶劣海况下船舶电力推进系统抗过旋控制策略研究
2.1平静海况下船舶电力推进系统控制策略
平静海况下电力推进系统转速控制结构 如图1所示。
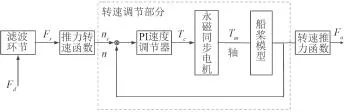
图1 平静海况下转速控制结构Fig. 1 Block diagram of shaft speed control in normal condition
平静海况是指船舶在平静的水面航行,螺旋桨全部浸没在海水里,不存在浪、流、涌等因素。Fr是 Fd通过一个滤波环节给定的理想的推力值,Fd是给定的一个常值。
2.1.1控制的基本参数
经过分析可知,轴的转速 ω 与电机的转矩 Tm可以实际测得。最基本的控制参数为螺旋桨的直径 D、推力系数 KF和转矩系数 KT,这 3个参数,可从船舶的推力或螺旋桨的敞水特性求出。对于此控制系统,静摩擦转矩常数 Ts、摩擦系数 Kω和转动惯量 Is都为理想值。Ts与 Kω的值在确定控制系统时已经确定,转动惯量 Is由电机本身的特性确定。
2.1.2控制目标
最终的控制目标是使实际螺旋桨输出的推力 Fa跟随给定的推力 Fr。在动态情况下,其他参数也应跟随给定的推力 Fr。控制的目的是减少机械损耗,限制功率振荡峰值。
2.1.3转速控制
转速控制部分主要由滤波环节、推力转速转换函数和转速调节部分组成。Fd是给定的推力值,给定的推力经过滤波环节后,得到一个滤掉谐波和其它瞬时变化的推力,经过滤波后的推力为Fr,根据推力计算出需要的转速 nr,需要的转速再经过一个 PI 调节器,得到控制电机的转矩 Tc。转速控制策略最终输出的是螺旋桨的转速 n,与给定的转速比较,从而达到控制转速的目的[8]。
2.2恶劣海况下抗过旋控制策略
船舶在平静海况下正常航行时,螺旋桨全部浸没在水里。当海况恶劣变化时,螺旋桨会随着外界环境的变化而露出水面,此时桨叶之间有一定的空气流通,会产生通风变化。如果仍用平静海况下的转速控制策略,不能达到很好的控制效果,所以恶劣海况下,采用一种新型的控制策略,即抗过旋控制策略。图2为抗过旋控制结构框图。
控制目标:降低推进电机的转矩,限制电机过速旋转。
控制方法:计算抗过旋控制系数,调整恶劣海况下转矩参考值 Tras,使螺旋桨最终输出的推力值与给定值基本吻合。
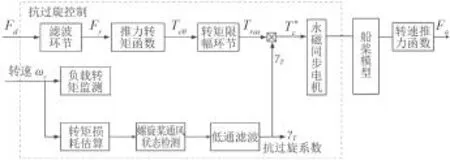
图2 恶劣海况下抗过旋控制结构框图Fig. 2 Block diagram of Anti-spin control in extreme condition
2.2.1抗过旋控制
抗过旋控制模块由两部分组成:一部分为转矩抑制功能,一部分为转矩平滑功能。总体控制思路:抗过旋控制器输出一个系数送给推进器控制部分,将恶劣海况下的转矩进行优化,乘以一个因子之后,再输送给电机,从而对推进电机进行控制。转矩抑制环节引入转矩比例系数 γT控制推进器转矩。转矩平滑环节,用于形成与恶劣海况下的期望转速相匹配的推进力,匹配推进力将实现电机转矩的平滑过渡。依据调整后的轴转速与转矩的关系,得到转矩参考值 Tras。Tras与 γT共同作为主推进控制模块的输入,实现恶劣海况下的船舶推进控制。图3为抗过旋控制模块结构图。

图3 抗过旋控制结构Fig. 3 Block diagram of Anti-spin control
2.2.2负载转矩监测
螺旋桨的旋转动态模型为方程:

式中:nr为螺旋桨转速参考值;Tf1为摩擦转矩常数。Ta和δf满足下面的方程:
有限的输入 u 公式为:

其中 kg为电机与螺旋桨的传动比。
与负载转矩观测器的数学模型类似,实际的螺旋桨旋转动态模型关系式为:

2.2.3转矩损耗估算

式中:n 为转速;KTC为控制转矩系数;为期望的额定螺旋桨负载转矩。
期望的螺旋桨负载转矩为:

当轴转速比较低时,为了防止过速旋转,对转矩损失因子的估算值加上下限。由于轴转速为0 时没有推力损失,因此重新定义转矩损失因子为:

2.2.4螺旋桨通风状态检测
推力损失的检测有许多种方法,比较简单的方法是对螺旋桨轴转速的变化速度或者推进电机转矩的变化速度设定一个检测标准值。下面建立螺旋桨出入水检测的算法[9],为了完善检测算法,对转矩损失因子加以限制对于检测的另外一个要求是电机转矩是非增的,即假定检测信号为ζ,当检测到螺旋桨处于通风状态时将 ζ 置为1,否则将其置为0。数学关系式如下:
3 仿真模型的建立
图4为系统仿真整体框图。用 Matlab 搭建各部分仿真模型(图5~图8)。
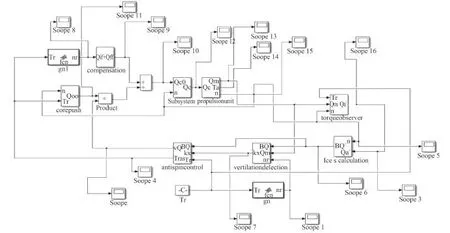
图4 系统整体仿真框图Fig. 4 Block diagram of simulation
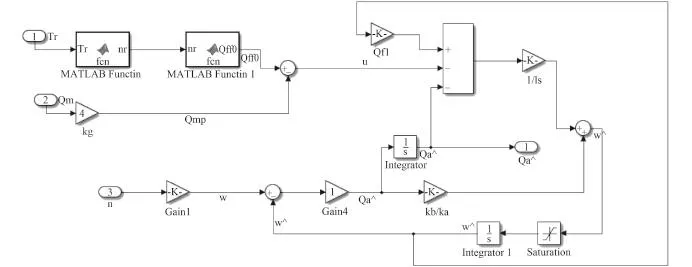
图5 负载转矩监测Fig. 5 Load torque detection
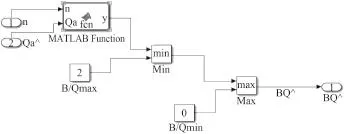
图6 转矩损耗估算Fig. 6 Torque loss calculation
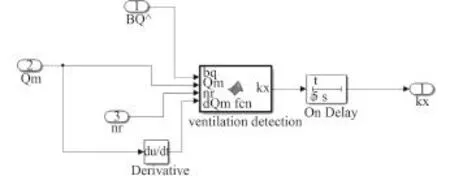
图7 通风状态检测Fig. 7 Ventilation detection
仿真结果分析:抗过旋控制策略是在恶劣海况下产生控制效果。如图9所示,2 s 之前船舶在平静海况下航行,此时推力比较小;2 s 时产生通风,信号为1,船舶由平静海况转为恶劣海况航行,由于螺旋桨突然露出水面,产生通风,推力会突然增加,接近 3 500 kN。采用抗过旋控制策略后,螺旋桨产生的推力得以控制,2~5 s 之间减小到 300 kN,经过一段波动后,几乎平稳在 300 kN,达到给定的推力值。可以证明抗过旋控制策略有一定的控制效果,能达到预期控制目标。

图8 抗过旋控制Fig. 8 Anti-spin control
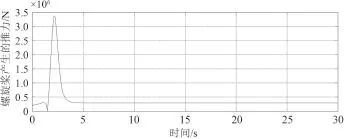
图9 螺旋桨输出的推力与时间关系曲线图Fig. 9 Simulation result of thrust
4 结 语
抗过旋的组成部分包括抗过旋控制、螺旋桨负载转矩监测、转矩损耗估算、螺旋桨通风状态检测。抗过旋控制能在极端工况,即恶劣海况下控制螺旋桨,并能控制和降低轴转速直至该现象结束。恶劣海况下,螺旋桨进出水面,使得螺旋桨转速过快,采用抗过旋控制方法可以使转速降低,减少转矩损耗,避免机械损失。本文使用 Matlab 仿真软件对船舶电力推进系统进行建模仿真,最终输出的推力值与给定的推力值基本吻合,达到了降低推力的效果,验证了抗过旋控制策略在恶劣海况下的可行性。
[1]何琪. 船舶电力推进负载模拟系统研究[J]. 舰船科学技术,2015, 37(2): 128-131. HE Qi. Research of load simulation system for marine electric propulsion[J]. Ship Science and Technology, 2015, 37(2):128-131.
[2]程木军, 孙才勤. 智能PID控制器在船舶发电机电压控制中的应用[J]. 大连海事大学学报, 2006, 32(2): 5-8, 16. CHENG Mu-jun, SUN Cai-qin. A new intelligent PID controller in application to marine generator voltage control system[J]. Journal of Dalian Maritime University, 2006, 32(2): 5-8, 16.
[3]李勇. 船舶电力推进模糊-PI控制方法[J]. 中国航海, 2014,37(1): 34-38. LI Yong. A fuzzy-PI control for vessel electric propulsion[J]. Navigation of China, 2014, 37(1): 34-38.
[4]何新英, 徐曼平. 基于神经元自适应PID船舶电力推进电机控制系统研究[J]. 广东造船, 2013, 32(4): 47-48, 64. HE Xin-ying, XU Man-ping. Research on ship electric propulsion motor control system based on neuron adaptive PID control[J]. Guangdong Shipbuilding, 2013, 32(4): 47-48, 64.
[5]张桂臣. 复合误差模型自适应船舶控制系统的应用研究[D].大连: 大连海事大学, 2009. ZHANG Gui-chen. The study and application of hybrid error adaptive model for ship control systems[D]. Dalian: Dalian Maritime University, 2009.
[6]郭燚, 郑华耀. 船舶电力推进电机驱动技术研究[J]. 舰船科学技术, 2005, 27(4): 22-26. GUO Yi, ZHENG Hua-yao. Research on vessel electric propulsion motor drives technology[J]. Ship Science and Technology,2005, 27(4): 22-26.
[7]张利军, 孟杰, 兰海. 船舶电力系统的非线性鲁棒性控制[M].北京: 国防工业出版社, 2011: 40-41. ZHANG Li-jun, MENG Jie, LAN Hai. Nonlinear robust control of ship power systems[M]. Beijing: National Defence Industry Press, 2011: 40-41.
[8]刘维亭, 李文秀. 舰船电力系统分散鲁棒励磁控制器的研究[J]. 船舶工程, 2005, 25(3): 46-50. LIU Wei-ting, LI Wen-xiu. Decentralized robust excitation controller for improvement of warship power system's stability[J]. Ship Engineering, 2005, 25(3): 46-50.
[9]SMOGELI Ø N. Control of marine propellers-from normal to extreme conditions[D]. Trondheim, Norway: Norwegian University of Science and Technology, 2006.
Research on anti-spin control of marine electric propulsion system in extreme conditions
WANG Tong-xuan, REN Qian, LIANG Jing-kai, QU Yan-bin
(School of Information and Electrical Engineering, Harbin Institute of Technology at Weihai, Weihai 264209, China)
A propeller subject to extreme conditions may experience large load transients due to ventilation and in-andout-of water effects. The controllers designed for normal conditions may then no longer give satisfactory performance. Since torque and power control needs keeping constant, a loss of propeller load torque will lead to severe motor racing. To assure satisfactory performance for all conditions, the anti-spin control strategy for extreme conditions is therefore introduced. Differing from control strategy for normal conditions, the ventilation detection and loss effects are included the Anti-Spin control strategy. Moreover, loss factor and torque calculation are analyzed. The reliability of the anti-spin control strategy is verified.
marine electric propulsion system;extreme conditions;anti-spin control;loss calculation
U661.4
A
1672-7619(2016)09-0078-05
10.3404/j.issn.1672-7619.2016.09.015
2016-02-02;
2016-03-04
工信部高技术船舶科研资助项目(工信部联装[2013]411号);威海市大学共建资助项目(2013DXGJ04)
汪桐萱(1990-),女,硕士研究生,主要从事船舶电力推进系统的技术研究。
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:22:08
航空发动机(2020年3期)2020-07-24 09:03:16
四川冶金(2018年1期)2018-09-25 02:39:26
通信电源技术(2016年1期)2016-04-16 04:57:26
船海工程(2015年4期)2016-01-05 15:53:38
应用海洋学学报(2015年3期)2015-11-22 07:39:14
电机与控制应用(2015年3期)2015-03-01 03:49:59
舰船科学技术(2015年8期)2015-02-27 15:38:44
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年1期)2014-05-14 06:40:47