基于PLC的2-DOF并联机械手控制系统设计
2016-11-03 11:08杨惠忠卿兆波
制造业自动化 2016年10期
张 帅,杨惠忠,卿兆波
(中国计量大学 机电工程学院,杭州 310018)
基于PLC的2-DOF并联机械手控制系统设计
张 帅,杨惠忠,卿兆波
(中国计量大学 机电工程学院,杭州 310018)
介绍了2-DOF并联机械手的主要结构以及功能,通过对该装置结构与工作原理的分析,构建了以安川运动控制器MP2300S和北尔人机界面为核心的控制系统,开发了控制系统的应用软件。通过MPE720.V7编程软件完成了运动程序的编写、伺服驱动器的配置、仿真以及监控等功能。经过对该系统的调试运行,验证了系统设计的正确性和稳定性,并且能够高效的控制,具有广泛的应用前景。
并联机械手;触摸屏;PLC;伺服系统
0 引言
随着中国科技的飞速发展以及现代制造业、工业自动化诸多行业的需求,机械手在医药、电子产品和食品等轻工业领域的搬运、分拣、上下料等作业得到广泛的应用[1,2]。与传统的串联机械手相比,并联机械手具有精度高无累积误差、刚性好、承载能力强、各向同性好以及动力学特性好等特点,故在研究和应用中作为主要对象。
机械手的控制系统有很多的设计方案。例如采用单片机+上位机的控制结构,上位机+NI运动控制卡等控制体系[3]。在本文中,介绍一种以Yaskawa的MP2300S运动控制器、伺服驱动器SGD7S-5R5A10A002、远程I/ O模块为硬件,通过Mechatrolink-Ⅱ实现快速、稳定、高效的运动控制系统。
1 2-DOF并联机械手简介
如图1所示为2-DOF并联机械手结构。该装置主要有静平台、动平台、主动臂、从动臂构成。通过安装在静平台上的伺服电机驱动主动臂,带着从动臂动作,最终实现动平台的移动。
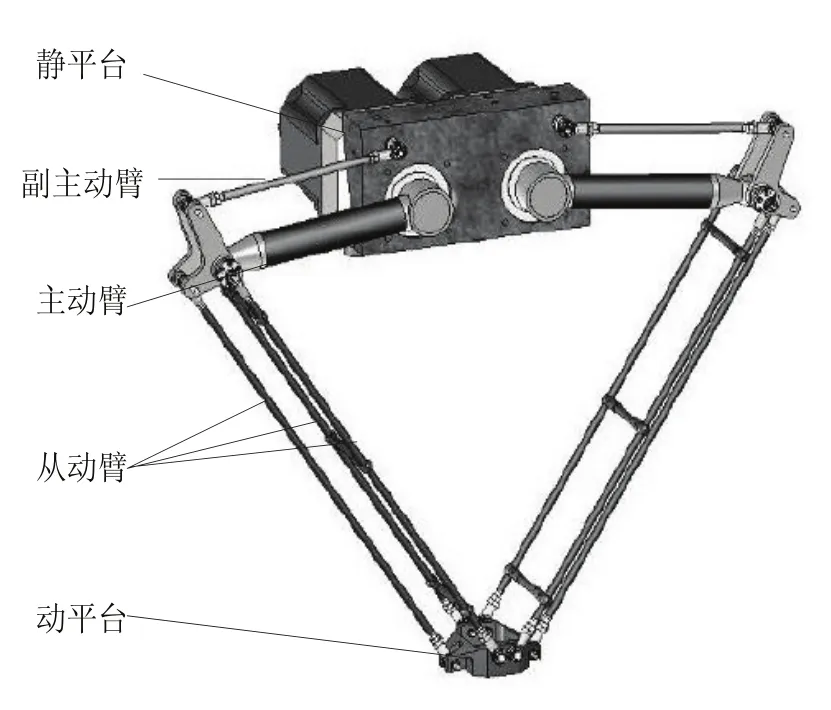
图1 并联机器人
2 控制系统
2.1系统硬件设计
运动控制器作为控制系统的核心,在选型时根据具体的控制要求选择一款性价比高的控制器。在本系统中,MP2300S基本模块是将电源/CPU、内置SVB、I/O一体化的多合一构造的模块,兼有运动控制功能和顺序控制功能。该控制器支持机械控制所需要的转矩控制、速度控制以及位置控制外,也实现了精度要求极高的同步相位控制的4种模式切换控制,这样可以满足机械手复杂的机械动作;能够实现轨迹运动中所需要的直线插补、圆弧插补、螺旋插补等功能;通过总线MECHATROLINK-Ⅱ与伺服驱动器进行完全同步控制;程序的顺控与运动控制在1个扫描周期内便能够完成从发送气动信号到启动运动控制的操作,最大限度的利用其高速性,缩短了产距。
伺服电机的选型,根据负载的转矩、转动惯量、机械运动的分辨率、编码器、是否制动等选择合适的伺服电机。机械手具有高速、低负载等运动特点,因此本系统中选择Yaskawa的中惯量、高速的旋转型电机SGM7J-08A7C6E和配套的单轴伺服驱动器单元SGD7S-5R5A10A002。该伺服驱动器具有高速、高频度、高定位精度的特点,能够在最短时间内最大限度的发挥极其性能,有利于实现机械手的高速运动。
开关电源的选择,MP2300S运动控制器是24V直流电源供电,开关电源的输出电压根据控制器的输入电压选择,输出电流是控制额定电压的1.6倍,因此采用规格为24DVC/100W的明纬NES-100-24V开关电源。
人机界面的选择,为了在工作过程中实时监测机械手的工作状态、报警状态以及设置参数选用一款与MP2300S控制器兼容的北尔7寸显示屏IX T7F-2。该人机界面通过以太网与运动控制器组网实现了数据的传送传送,缩短了传送周期。系统的控制网络结构图如图2所示,供电电路如图3所示。
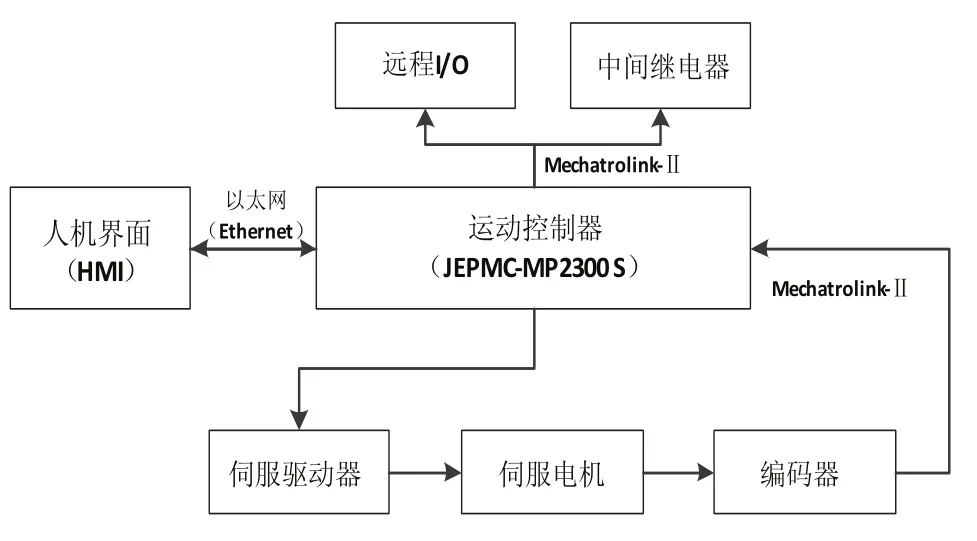
图2 系统控制网络结构
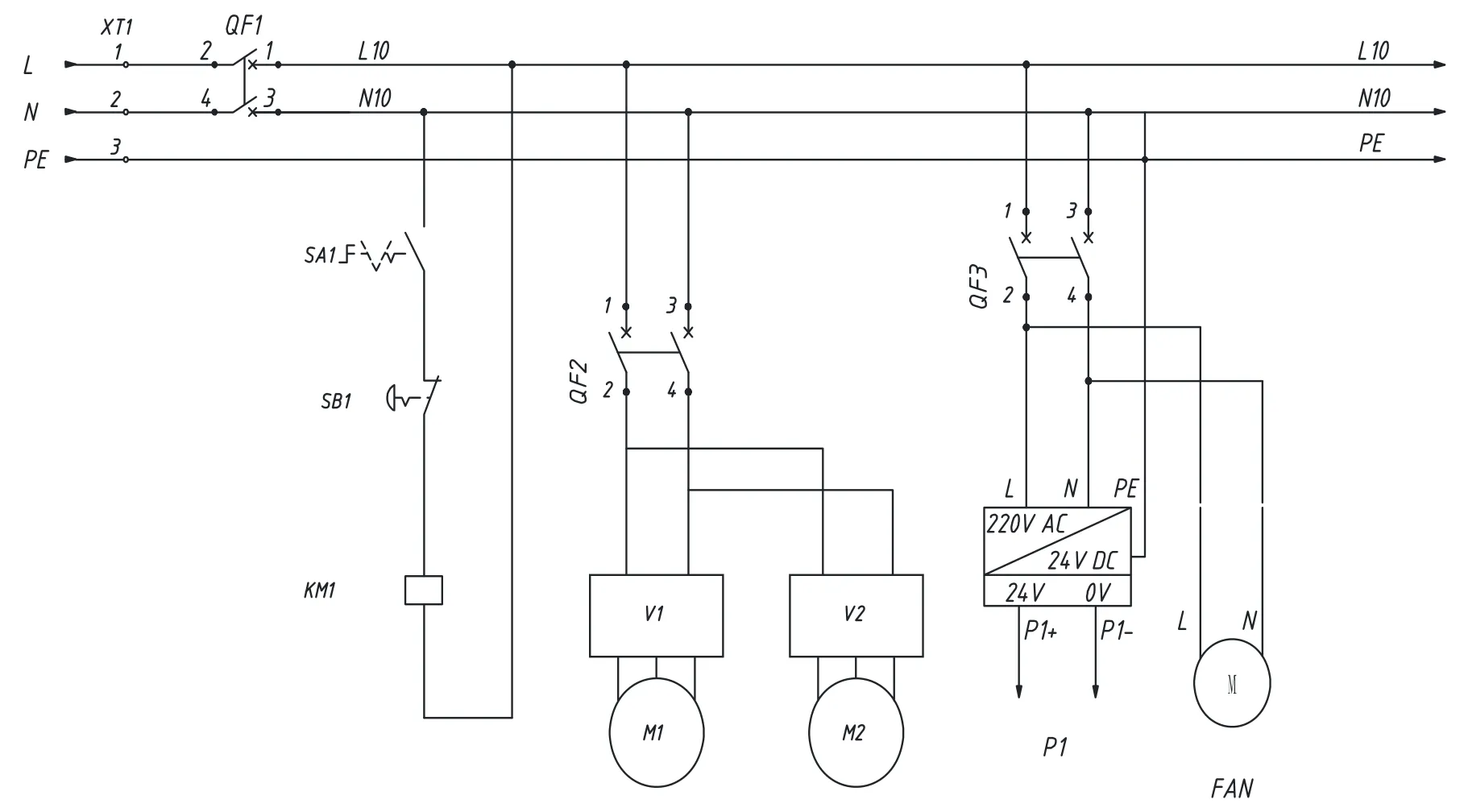
图3 供电电路
2.2系统软件设计
系统软件作为控制的核心,程序结构的合理设计以及严谨的逻辑会直接影响到整个机构的稳定、控制的精度、以及人为操作的便利。控制软件的主程序流程图如图4所示。

图4 主程序流程图
软件系统的设计根据结构、功能的不同将分为参数设置、数据处理、控制输出、控制输入、HMI通信、复位、故障报警7大模块,软件结构图如图5所示。
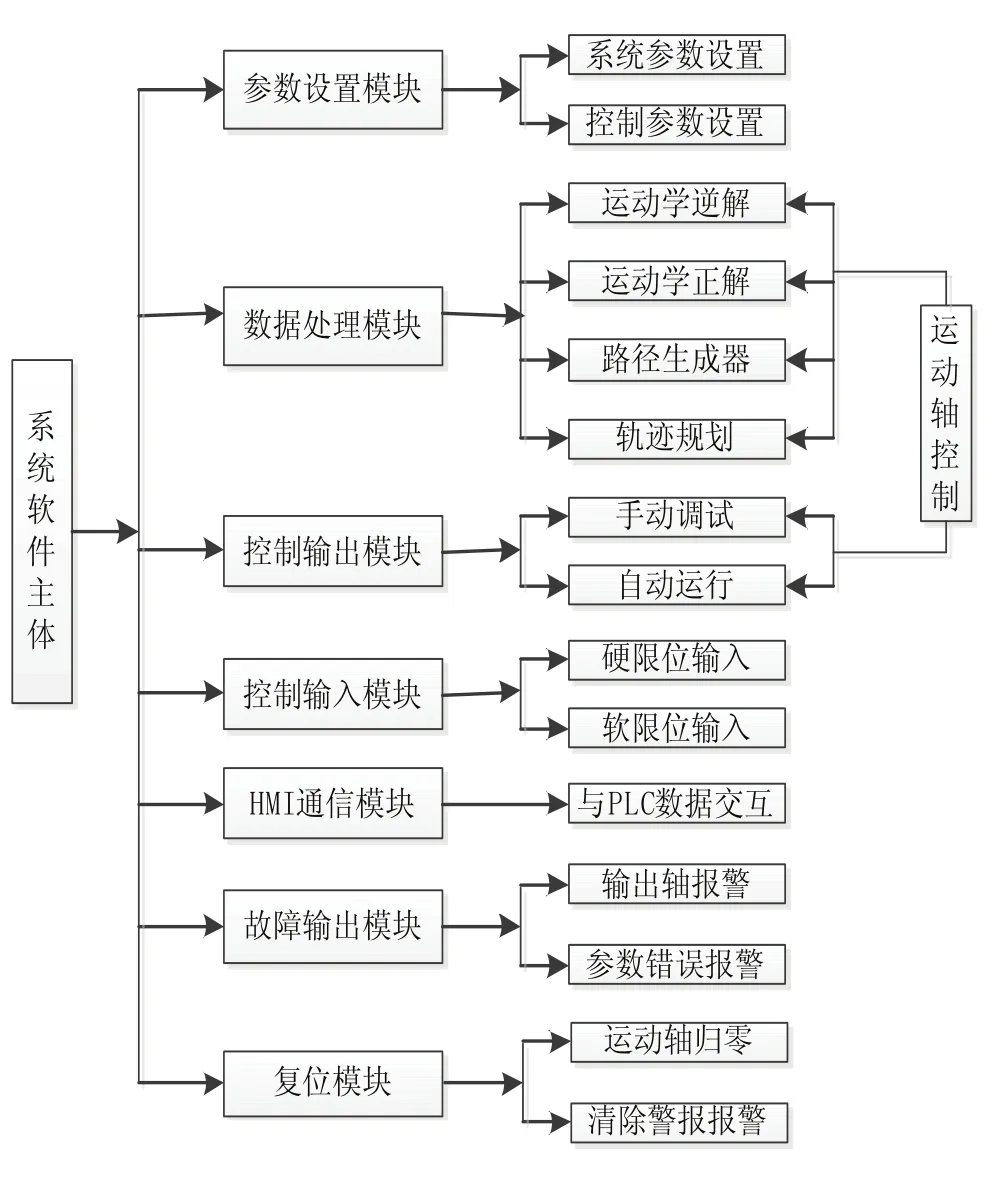
图5 软件结构图
该运动控制软件在扫描周期上分为高速扫描(High-Speed)和低速扫描模块(Low-Speed),高速扫描周期通常为0.02s,低速扫描周期为高速扫描周期的2倍以上。在本运动控制系统中,两个单独的电机轴作为基本控制对象。在MPE720 Ver7.0工程中完成伺服控制轴的设置、通讯参数的配置、虚拟轴的建立如图6所示。
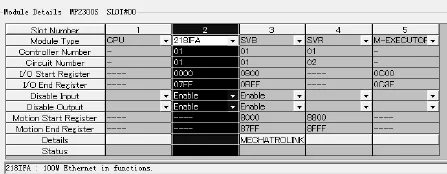
图6 伺服运动轴设置
2.2.1运动学求解
机械手能够准确地作业,分析结构的运动学模型尤为重要。图7为2-DOF并联机械手机构坐标模型,机械手的运动学求解通过Pro/E三维实体建模、AutoCAD二位建模、MATLAB数学建模进行分析。
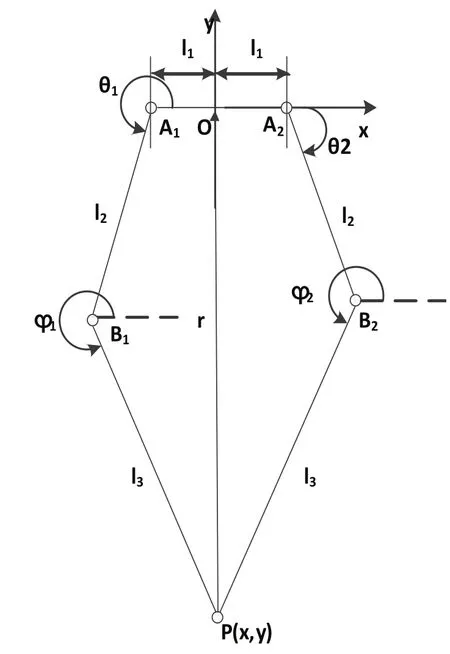
图7 机构坐标系
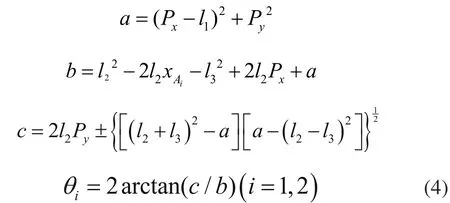
位置逆解[4]:

将上式求解为:

消去φi得:

公式进一步整理得:
其中:
位置正解:
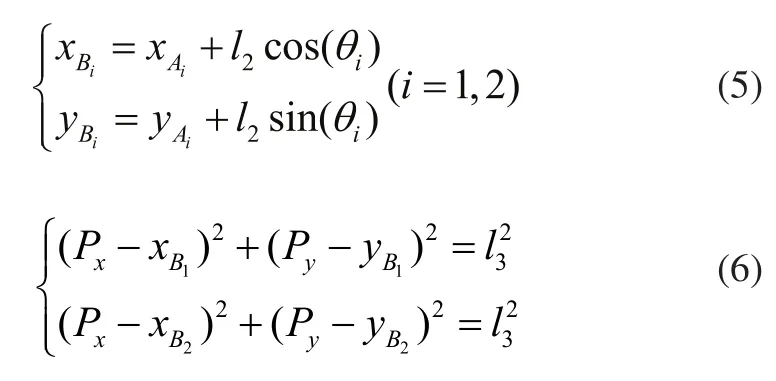

其中:

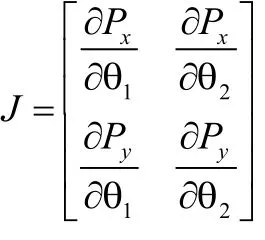
速度求解:

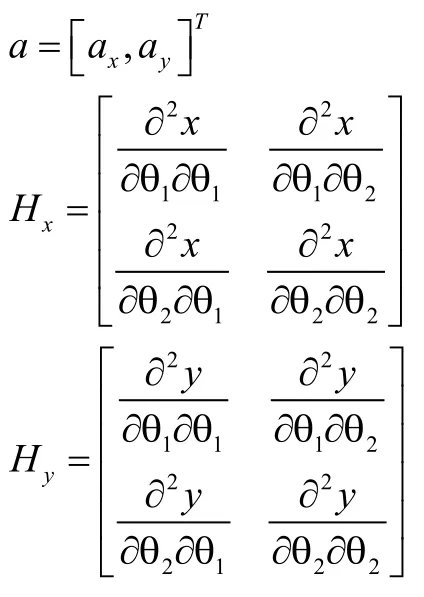
加速度求解:

其中:
2.2.2轨迹规划算法模型
为了减少机械手运动过程中的机械抖动,避免对机械结构的冲击使运动更加平缓,需要对机械手末端运动的起始、终止点进行加速度的约束,故在本系统中采用五次多项式进行运动轨迹规划[5]。
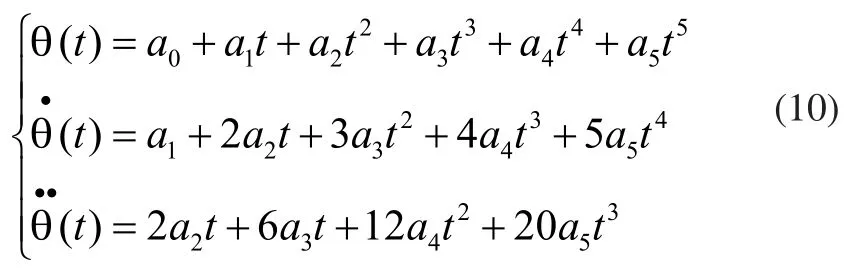
起始时刻(t0),结束时刻(tf)代入式(10)得到6个约束方程:
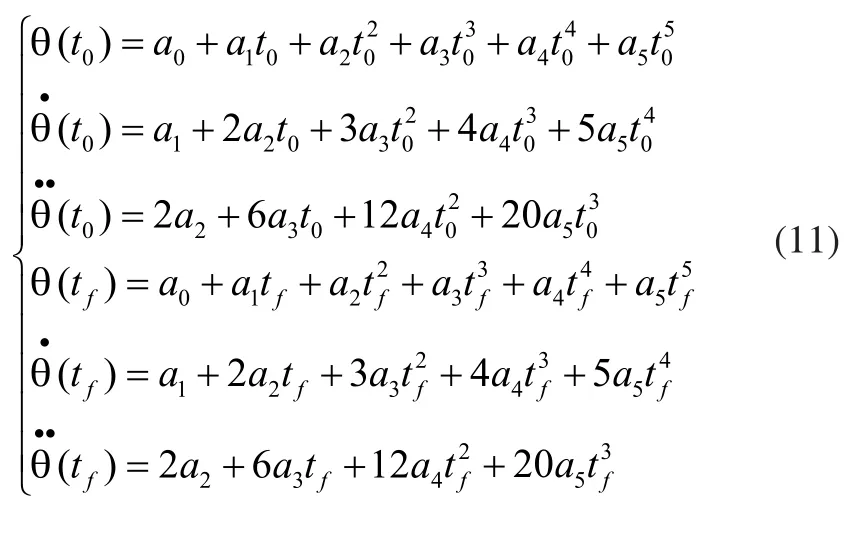
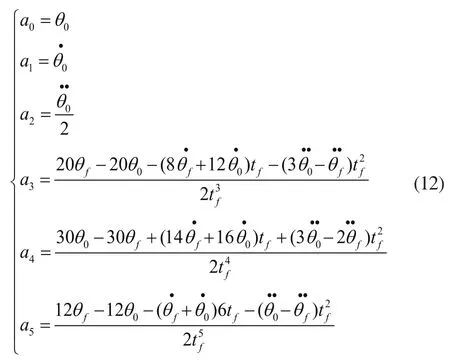
对式(11)求解得:
2.2.3手动调试模式
在手动模式下,电机轴单独控制,本系统采用定位模式控制与转矩控制模式相互切换控制。在该模式下,便于机械手的调试与维修。为了在生产中安全可靠地运行,机械手需要进行复位操作;如果没有进行复位操作直接切换到自动模式,机械手会根据编码器的反馈进行检测是否在初始状态,如果在初始状态,机械手即刻进入自动运行模式,否则自动复归到原点后切换到自动运行模式。
2.2.4自动运行模式
当启动机械手并且进入自动运行模式后,在执行过程中,路径生成器利用轨迹规划的计算结果更新数据,使机械手根据预先设定的轨迹,追踪路径。当一个周期结束后,机械手自动回到原点状态,等待下一个指令;并且可以设置运行周期,使机械手循环操作。
2.2.5复位模式
按下复位按钮后,动平台复归到机械的原点状态,伺服电机轴处于等待状态。复位操作,可以清除运行过程中产生的警告信息、报警信息。当机械手在复归运行过程中,其他模式处于锁定状态,并且状态指示灯处于黄灯频闪状态,当运行结束后,状态指示灯处于常亮模式。
其中J:
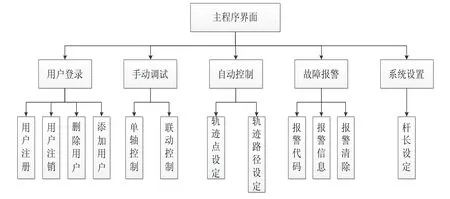
图8 HMI组态结构图
2.3人机界面设计
触摸屏用来机械手的监视控制。控制系统的人机界面采用北尔电子的7寸IX T7F-2显示屏,在IX Developer2.10的组态软件上对界面进行设计,界面上设计了用户登录、手动控制、自动控制、故障报警和系统参数5个主要界面,图8为HMI画面结构图,图9为手动控制界面。

图9 手动控制界面
3 结束语
在电子、食品、医疗等行业,并联机械手作为高速、轻载机器人有着广泛的应用前景。本文中采用了Yaskawa的MP2300S运动控制器实现两轴联动控制作了深入研究,通过Sigma win+对电机轴的跟踪监测达到控制要求,验证了控制功能。该控制系统的设计,提高了自动化水平,同时大大提高了生产效率,改善了人工的劳动务件。
[1] 梅江平,王攀峰,倪雁冰.二平动自由度高速并联机械手位置控制[J].组合机床与自动化加工技术,2004,(4):7-8,10.
[2] 李占贤,黄田,梅江平.二平动自由度高速轻型并联机械手控制技术研究[J].机器人,2004,26(1):63-068.
[3] 唐和业.一种两自由度并联机械手教学演示平台数控系统的研究与开发[D].天津:2007,1.
[4] 李艳.二自由度冗余驱动并联机器人的动力学建模及控制研究[D].济南:山东大学,2010.
[5] 贠超等译.机器人学导论[M].北京:机械工业出版社,2015,163-173.
Design of 2 - DOF parallel manipulator control system based on PLC
ZHANG Shuai, YANG Hui-zhong, QING Zhao-bo
TP273
A
1009-0134(2016)10-0100-05
2016-06-21
张帅(1991 -),男,山西汾阳人,硕士研究生,研究方向为装备制造与控制工程。
猜你喜欢
微特电机(2020年11期)2020-12-30
装备制造技术(2020年4期)2020-12-25
电子制作(2019年13期)2020-01-14
汽车文摘(2019年3期)2019-03-04
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
制造技术与机床(2017年4期)2017-06-22
电子制作(2016年1期)2016-11-07
重型机械(2016年1期)2016-03-01