基于S120伺服驱动模块111报文的西门子S7-300程序模块设计
2016-11-03 11:08:46朱晓民
制造业自动化 2016年10期
高 挺,朱晓民,张 希,程 金
(北京机械工业自动化研究所,北京 100120)
基于S120伺服驱动模块111报文的西门子S7-300程序模块设计
高 挺,朱晓民,张 希,程 金
(北京机械工业自动化研究所,北京 100120)
针对自动化系统中集成S120伺服驱动模块时遇到的控制及通讯难题,设计了基于111报文的S7-300通讯控制程序模块Servo120。使得从事自动化工作的工程师可以通过该模块简单、快捷的实现S7控制系统与S120伺服驱动模块的通讯,并通过报文方式实现S7-300PLC对S120伺服驱动模块的速度与位置控制。模块对报文中的控制及状态字进行详细解析,大大提高了调试诊断效率。并设置了多点联动,速度转换等模式,极大的方便了现场应用,提高了系统集成过程的效率并降低了操作难度。
S120伺服驱动模块;111报文;程序模块
0 引言
当今,企业对生产设备的要求是设备生产成本越来越低,但同时能够提供越来越高的生产效率。SINAMICSS120伺服驱动模块因恰恰能满足这些方面的要求而被广泛应用于自动化系统中。对于自动化系统集成商而言,伺服系统的好处虽然很多,但其与中央控制器的融合过程往往因工程师经验不足等原因而变得比较困难。本文以S7-300与S120通讯的111报文为基础,对其进行深入解读,设计出一款专用通讯控制程序模块。为S120伺服驱动模块在以S7-300为核心的自动化系统中的应用带来了极大的便利。
1 模块设计的硬件配置及软件环境
通讯控制程序模块的设计是基于S7-300的PLC与S120通讯111报文的,因此模块环境平台的搭建如下:在S7硬件中配置S120硬件(如图1硬件配置),在整个项目中集成S7-300CPU作为整个系统的核心控制器、S120伺服驱动模块、MP277人机交互触摸屏系统(如图2项目配置),以图3网络连接所示的方式通过PROFIBUS网络组成统一的系统。
软件环境需要使用SIMATIC Manager V5.5、Starter、SIMATIC WinCC flexible 2008等编程软件。
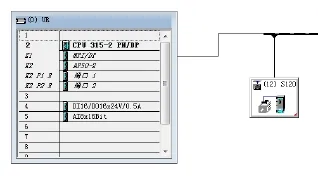
图1 硬件配置
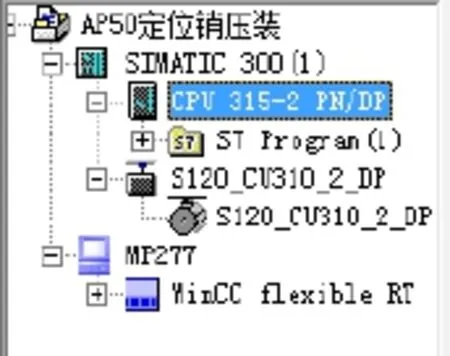
图2 项目配置

图3 网络连接
2 软件程序模块Servo120设计
1)输入输出接口设置
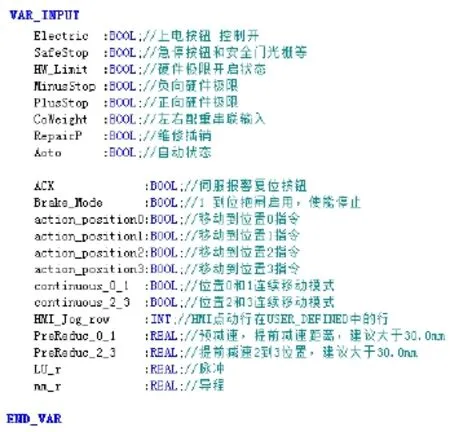
图4 输入接口
输入接口包括设备的上电状态、安全状态、极限开关状态、维修插销状态、以及设备的运行状态等状态信息;报警复位按钮、抱闸模式选择、HMI点动行选择、移动指令、移动模式设定等指令模式信息;系统丝杠导程、每转的脉冲数等系统参数信息。方便调试工程师各种输入信息的调整,如图4所示。
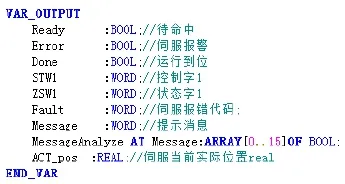
图5 输出接口
输出接口包括反馈的伺服系统运行状态、错误报警信息、控制状态字信息、消息报错代码以及伺服当期位置等基本信息。从而帮助调试工程师通过输出反馈进行诊断,便于设备调试,如图5所示。
2)模块内部时钟设置
模块内置单独脉冲驱动时钟,不占用系统定时器资源,减少了模块程序使用时由于定时器的使用导致的系统内部冲突,如图6所示。
3)模块控制字状态字解析
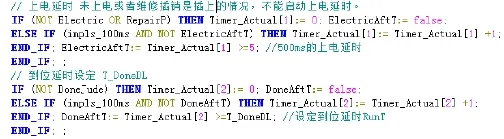
图6 模块内部时钟
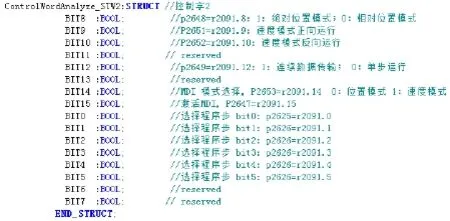
图7 状态字解析
程序模块内部将控制字和状态字以二进制变量形式进行逐点解析,便于以更详细的状态展示当前系统的问题。可以更好的便于调试工程师进行状态分析,如图7所示。
4)模块操作模式设定
程序模块根据输入设定及最广泛的应用方式设定伺服驱动模块的工作状态,修改相应参数将可以修改伺服的运行模式状态,如图8所示。
5)伺服移动位置给定及位置到达判定,如图8所示。
3 程序模块的使用
将多种功能融为一体的程序模块Servo120,最多可实现16个可变位置的伺服定位控制;可以手动切换抱闸工作模式;能实现多点联动,并按照预设位置自动切换移动速度;同时实现HMI行的自动配置,点动前后移动控制;以及丝杠导程、单转脉冲的单独配置;同时对报警状态、控制字状态字及实际位置进行实时显示。

图8 操作模式设定

图9 位置设定及判定
伺服驱动模块使用之前,应先设置当前系统需要的所有位置及速度信息(即需首先完成图10Target参数数组的赋值)。设置完成后,即可启动移动指令,如图11所示)。

图10 目标位置速度

图11 移动指令当前位置
Target数组可存储16个位置和速度数据,能满足大多数自动化设备专机使用。Action_position移动指令数组可接收对应的移动指令,并在Present_position数组中反馈当前移动位置。
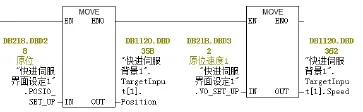
图12 速度位置设定
简单给程序模块Servo120赋值即可完成位置和速度的设定,把设定值作为变量关联到HMI人机界面上将实现位置和移动速度的可视化修改,为设备的调整提供了便利务件。给Servo120程序模块发出伺服移动指令Action position[n],Servo120程序模块将控制伺服驱动模块以设定速度移动到相应设定位置n,并反馈到位信号。

图13 移动指令
4 结论
本文设计了一种基于西门子111报文的S7-300的PLC与S120伺服驱动模块通讯控制模块Servo120。该模块在大众211项目中得到验证并广泛应用。程序模块Servo120运行稳定可靠、兼容性好、并且扩展性强。项目中广泛的应用使得项目调试进度大大提高,并减少了出错率,提高了控制系统伺服驱动部分的稳定性,充分体现了模块化程序的优越性。该模块会为带有S120伺服驱动模块的项目,在实施中提供了一务快捷、可靠的解决方案。
[1] 阮毅.陈伯时.电力拖动自动控制系统--运动控制系统[M].北京:机械工业出版社,2009.
Siemens S7-300 program modules design based on 111 packets of S120 servo system
GAO Ting, ZHU Xiao-min, ZHANG Xi, CHENG Jin
TP23
B
1009-0134(2016)10-0067-03
2016-08-15
高挺(1980 -),男,哈尔滨人,工程师,本科,主要从事流体传动系统与汽车制造装备的设计研究工作。
猜你喜欢
茶叶通讯(2022年2期)2022-11-15 08:53:56
茶叶通讯(2022年3期)2022-11-11 08:43:50
汽车电器(2022年9期)2022-11-07 02:16:24
机械研究与应用(2022年4期)2022-09-15 02:17:04
软件学报(2021年2期)2021-03-06 09:28:36
铁道通信信号(2020年4期)2020-09-21 09:15:24
中国外汇(2019年11期)2019-08-27 02:06:30
中国信息技术教育(2018年20期)2018-11-19 04:42:38
现代电子技术(2018年10期)2018-05-15 06:43:02
舰船科学技术(2017年12期)2017-12-28 07:59:31