
侧窗探测动能拦截器末段轨控方案
2016-11-03 03:20尤雨骅
固体火箭技术 2016年4期
王 洋,周 军,赵 斌,尤雨骅
(1.西北工业大学 精确制导与控制研究所,西安 710072;2.中国运载火箭技术研究院,北京 100076)
侧窗探测动能拦截器末段轨控方案
王洋1,周军1,赵斌1,尤雨骅2
(1.西北工业大学 精确制导与控制研究所,西安710072;2.中国运载火箭技术研究院,北京100076)
针对侧窗探测动能拦截器(SWDKKV)的末段轨控问题,基于变结构控制理论提出了一种新的轨控方案。首先考虑侧窗约束,建立了三维空间下的轨控模型。随后,针对侧窗探测动能拦截器只能输出定常开关推力及具有姿态定向约束的特点,提出了一种新型变结构滑模面,基于所提出的滑模面设计了适合于末段拦截的bang-bang形式的轨控方案,采用Lyapunov稳定性理论严格证明了所提出方案的稳定性。为了降低喷气消耗,设计了滑模死区,且研究了能够保证命中精度的滑模死区的参数取值范围。仿真结果表明,所设计的轨控方案可确保动能拦截器直接撞击目标,设置滑模死区可以在保证命中精度的同时降低喷气消耗。
侧窗探测;动能拦截器;末制导;轨控方案;滑模控制;滑模死区
0 引言
20世纪80年代以来,弹道导弹防御从核时代转向非核时代,反导防御武器越来越追求命中精度,其中最有代表性的就是动能拦截器(KKV)[1-2]。KKV飞行速度高达5马赫以上,飞越大气层时的强烈气动加热会降低其携带的红外导引头的寻的精度。THAAD、SM-2等武器型号都采用导引头侧窗探测(SWD)技术来降低气动加热对探测精度的影响[3-4]。所谓的侧窗探测,就是将导引头安装在KKV的侧面。国外关于SWDKKV的公开文献[3-4]极少,它们只是针对侧窗的原理进行了一些讨论。国内近年来开展了一些研究。文献[5]考虑冷却问题对侧窗口进行了设计。针对侧窗探测角度的选取问题,有相关文献也进行了讨论[6-7]。针对姿态定向问题,文献[8-9]分别基于开关曲线方法与脉冲频率调制(PWPF)方法开展了研究。针对SWDKKV的末段轨控方案的设计问题,国内外还未有公开文献开展研究。
所谓轨控,就是通过推力器的输出实现制导律。数十年来,制导律飞速发展,出现了诸如比例制导律(PNGL)[10]、一体滑模制导律(ISMGL)[11]、有限时间收敛制导律(FTCGL)[12]等许多或容易实现或性能优良的制导律。但现有制导律都需要执行机构输出大小与方向都能变化的力。SWDKKV的推力器是捷联在本体上的,其输出具有两个特性:首先,输出是大小恒定的开关推力;其次,侧窗探测要求姿态定向,推力器又是捷联在本体上的,输出力的方向只能与视线方向处于一定夹角范围内。在现有方法中,脉宽调制(PWM)方法可将定常推力通过数字化的方法变换为变化推力[13]。但是PWM方法较为复杂且对于燃气流率的稳定性要求很高。再者,即使推力大小可变化,姿态定向也使得推力无法随意指向传统制导律给出的指令方向。
针对以上所述问题,本文基于变结构控制理论设计了一种bang-bang切换形式的末段喷气方案,适用于SWDKKV姿态定向且推力大小定常的情况。通过设置滑模死区减小了喷气消耗,然后对死区的参数取值与脱靶量的关系进行了研究。最后采用数学仿真验证了本文所提出方案的有效性。
1 侧窗约束动能拦截器轨控模型
如图1所示,OXYZ为末制导开始时的惯性坐标系,Ox2y2z2为视线坐标系。O与T分别为导弹与目标的质心。Ox2轴与视线轴重合且指向目标为正,Oy2轴处于垂直平面内且与Ox2轴垂直,Ox2轴与Oy2轴由右手准则确定Oz2轴。OXYZ与Ox2y2z2之间通过视线俯仰角φ与视线方位角θ进行转换。可以给出三维相对运动方程[14]:
(1)
式中r为相对距离;aMr、aMφ、aMθ分别为导弹控制加速度在Ox2轴、Oy2轴及Oz2轴上的投影;aTr、aTθ、aTφ、Fr、Fθ、Fφ分别是目标机动加速度、气动加速度在各视线坐标轴上的投影。
(2)

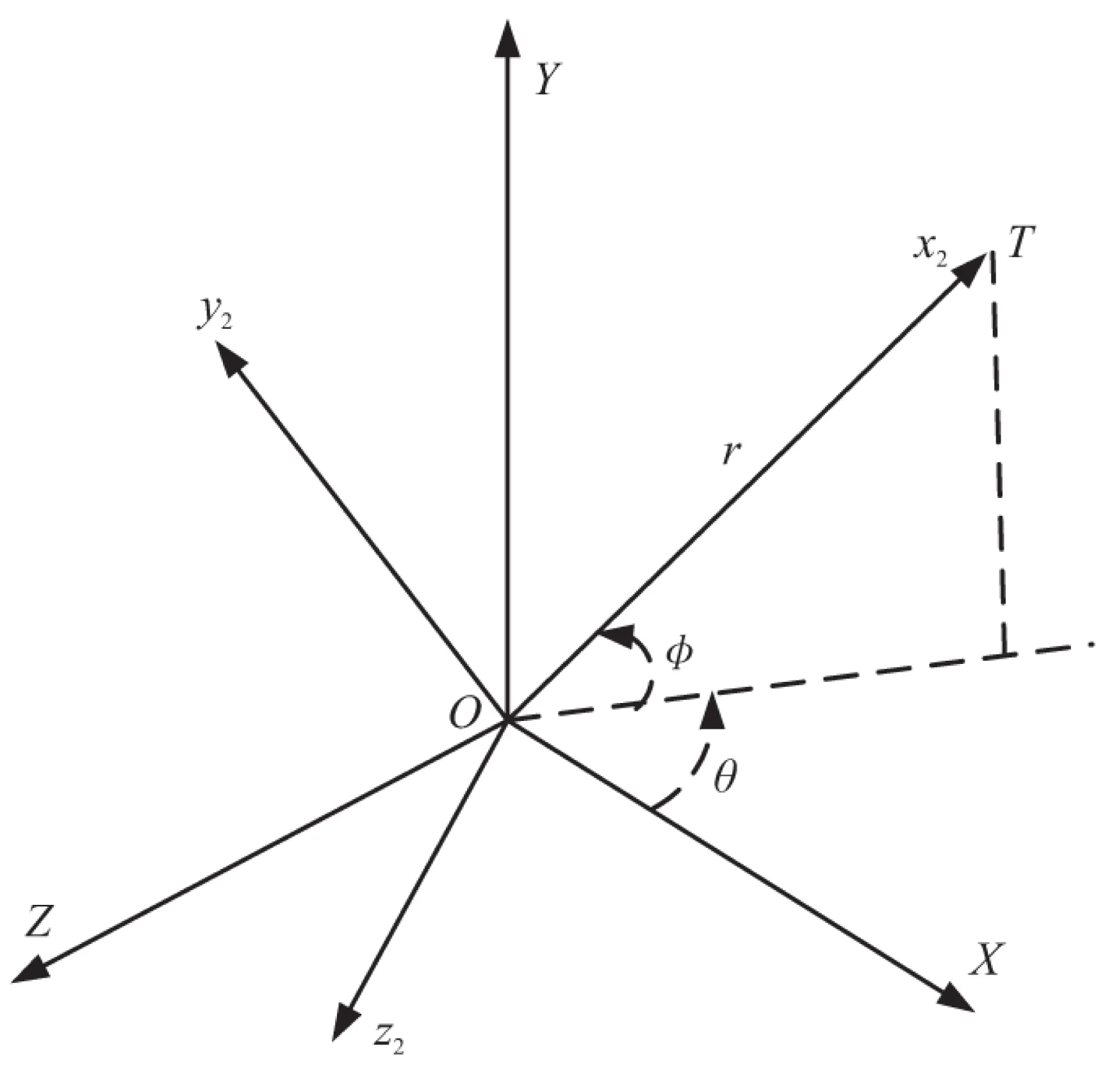
图1 导弹-目标三维运动关系
首先给出侧窗定向下坐标系的转换关系,如图2所示,视线坐标系Ox2y2z2,导弹本体坐标系Ox1y1z1。坐标系Ox1y1z1与Ox2y2z2相互转换的角度为高低角ε、偏航角β及滚转角γ。姿态定向完成后:|ε|≤εs,|β|≤βs,γ≈0。εs与βs的大小由侧窗的大小及姿态定向的精度共同决定。

图2 姿态约束关系
坐标系Ox2y2z2与Ox1y1z1的转换关系为
(3)
SWDKKV的推力器是捷联在本体上的,如图3所示。从导弹尾部向前看,推力器可产生沿本体Oy1轴与Oz1轴的轨控力,有推力器1、2、3、4。
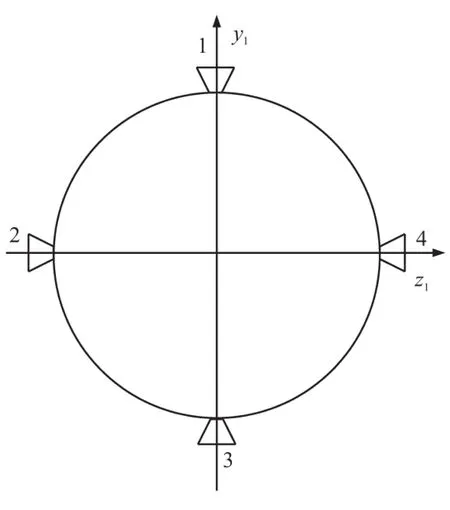
图3 推力器布局
设本体系下推力F1:
(4)
其中
(5)
式中Ωy、Ωz皆为正常值。
利用式(3)可将推力F1转换到视线系Ox2y2z2,得到视线系下的推力F2:
(6)
加速度a2=F2/m=[ax2ay2az2]。由坐标系定义可知a2就是导弹控制加速度在视线系Ox2y2z2下的投影,同时考虑姿态定向完成后γ≈0,可得
(7)
一般来说,由制导律给出的加速度指令的方向与大小都是变化的。然而由式(7)可看出,导弹的控制加速度的大小与方向都是受限的,无法实现传统制导律。下面将介绍一种适合于SWDKKV特点的轨控方案。
2 末段轨控方案
2.1无喷气死区的变结构方案
选取滑模面为
(8)

(9)
接下来由定理1给出本文所设计的轨控方案及稳定性结论。
定理1:考虑制导系统(2),选取滑模面(8),轨控喷气规律取式(10):
(10)
其中

(11)
如果式(12)与式(13)成立,则有限时间内s1=s2=0。
(12)
(13)
证明:
取Lyapunov函数:
(14)
将式(14)对时间求导,同时考虑式(9)可得
(15)


2.2有喷气死区的变结构方案
为了降低喷气量,设置滑模死区:
(16)
其中,k1、k2、ε1及ε2都是正常数,对于末制导来说cosφ>0,则δ1>0且δ2>0。
由定理2给出具有滑模死区的喷气律及稳定性结论。
定理2:考虑制导系统(2),选取滑模面(8),轨控喷气规律取式(17):
(17)
这里
(18)
其中,δ1与δ2由式(16)给出。如果式(12)与式(13)成立,则有限时间内|s1|≤δ1且|s2|≤δ2。
注:下面分析死区的参数与脱靶量的关系。
下面的分析中认为假设1成立。合理设计参数,轨控喷气规律取式(17),由定理2可得
(19)
(20)
考虑式(1)可得
(21)
式中Fr/m为气动所形成的加速度。
定义
(22)
式中max{x}为x的最大值;f为正常数。
结合式(1)与式(22)可得
(23)
由定义1可知r(tδ)是r在tδ≤t≤tf1时间段内的最大值,可推知:
(24)
结合式(20)与式(24)可知:
(25)
将式(25)在tδ到t上进行积分,可得
(26)
由于r(tδ)、k1及k2为正常数,可推知:
(27)

(28)
令c=r(tδ),将式(28)在tδ到t(tδ≤t≤tf1) 积分,可得
(29)
下面分a>0与a=0 2种情况讨论参数k1、k2、ε1及ε2对命中精度的影响。
(1)当a=0
由a=0及式(28)可得
(30)

a=0对应着侧窗定向角度为0,重力在视线上的作用为0,目标机动在视线上的分量为0及气动力在视线上的分量为0的绝对理想情况。
(2)当a>0

(31)
结合式(29)与式(31)可知
(32)
(33)
总之,可得到这样的结论:只要选取足够大的k1、k2及足够小的ε1与ε2,就能在设置死区的同时获得足够小的脱靶量。当然,由式(16)可知,k1越大k2及ε1与ε2越小时,相应的滑模死区就越小,对于喷气量的节约效果就越小。因此必须合理设计参数,在节约喷气量与命中精度之间寻求平衡。
3 仿真验证
仿真结果由图4~图9给出,详细的脱靶量与推力器的喷气消耗由表1给出。由图4与图5可见,在不设置滑模死区时,滑模面与视线角速率都能在命中目标之前快速收敛到0。由图7与图8可见,在设置滑模死区的情况下,滑模面与视线角速率都能在命中目标之前收敛到0附近。由图6可见,在没有设置滑模死区时,推力器密集地开启与关闭。而由图9可见,在设置了滑模死区后,推力器开关次数明显减少,在部分时间段内,推力器甚至保持关闭状态。
由表1可见,无论是否设置滑模死区,脱靶量都能满足直接撞击的精度要求。在设置了滑模死区后,无论是推力器开关次数还是消耗的比冲都明显下降。
从仿真结果分析可知,本文所提出的轨控方案式(10)可有效完成SWDKKV的轨道控制任务,而进一步提出的滑模死区式(16)不仅可完成轨道控制任务,而且可降低推力器的喷气消耗量。
(1) 无死区
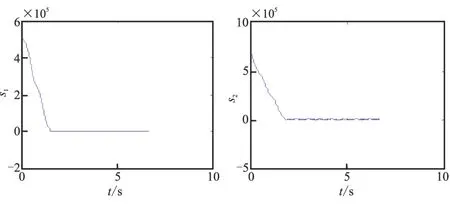
(a)s1 (b)s2

图5 视线角速率
(a)F1y (b)F1z
(2)有死区

(a)s1 (b)s2


图8 视线角速率
(a)F1y (b)F1z
表1 仿真结果
4 结论
(1)提出的轨控方案可有效解决SWDKKV的轨道控制问题。在所考察的飞行任务中,综合考虑了目标机动、姿态定向偏差、气动干扰以及喷气周期,结果表明轨控精度可满足直接撞击的任务要求。
(2)提出的轨控方案是bang-bang形式的,符合推力器的工作特性,因而所提出的方案具有良好的工程可实现性。
(3)提出的滑模死区不仅可大幅降低推力器的喷气消耗,而且还能取得良好的轨控精度。同时,也降低了推力器开关的次数,提高了推力器的可靠性。
[1]张宏安,叶定友,郭彤.固体动能拦截器研究初探[J].固体火箭技术,2002,25(4):6-8.
[2]陆亚东,杨明,王子才.固体动能拦截器助推段飞行方案研究[J].固体火箭技术,2006,29(3):157-160.
[3]Leary A,Watson W,Florie D,et al.Test& evaluation facility for thaad IR seekers [J].SPIE,2004,2474:172-177.
[4]Strauss B J,Gravina R J,Hasenzahl C J,et al.All attitude guidance and control for endoatmospheric intercepts [C]//AIAA SDIO Annual Interceptor Technology Conference,AIAA 93-2643,1993.
[5]杨晓颍,刘纯胜,顾永其.高速飞行器红外制冷头罩设计[J].红外与激光工程,2004,33(6):576-579.
[6]张洪波,郭振云,汤国建.大气层高层动能拦截器侧窗探测方位研究[J].国防科技大学学报,2008,30(6):34-38.
[7]Yang Bao-qing,Zheng Tian-yu.Zhang Si-lun.Analysis and modeling of terminal guidance system for a flight vehicle with side-window detection [C]//Proceedings of the 33rd Chinese Control Conference,Nanjing,China,2014.
[8]张洪波,郭振云,汤国建.大气高层具有侧窗的动能拦截器的数学仿真 [J].系统仿真学报,2007,19(23):5383-5385.
[9]Lu Cang-hai,Cai Yuan-li.Side-mounted window orientation algorithm and attitude controller design for kinetic kill vehicle [C] //Proceedings of the Fourth International Conference on Instrumentation and Measurement.Computer,Communication and Control,2014.
[10]Ghawghawe S N,Ghose D.Pure proportional navigation against time-varying target maneuvers [J].IEEE Transaction on Control Systems Technology.1999,22(4):589-594.
[11]Zhang Zhen-xing,Li Shi-hua,Luo Sheng.Composite guidance laws based on sliding mode control with impact angle contraint and autopilot lag [J].Transaction of the Institute of Measurement and Control,2013,35(6):764-776.
[12]Zhou Di,Sun Sheng.Guidance laws with finite convergence [J].Journal of Guidance.Control and Dynamics,2009,32(6):1838-1846.
[13]常桁,王一白,刘宇.基于PWM 原理的固体姿态控制系统实验研究 [J].固体火箭技术,2013,36(5):608-612.
[14]Ma Ke-mao,Zhang Xiao-yu.A novel guidance law with line-of-sight acceleration feedback for missiles against maneuvering targets [J].Mathematical Problem in Engineering,2014:1-8.
(编辑:吕耀辉)
Orbit control scheme of the terminal course of side window detection kinetic kill vehicle
WANG Yang1,ZHOU Jun1,ZHAO Bin1,YOU Yu-hua2
(1.Institute of Precision Guidance and Control,Northwestern Polytechnical University Xi’an710072;2.China Academy of Launch Vehicle Technology,Beijing100076)
In terms of the orbit control problem of the terminal course of side window detection kinetic kill vehicle(SWDKKV),this article puts forward a new rail control scheme based on the variable structure control theory.First of all,an orbit control model under three dimensional space was established after considering the restraints of side window.Subsequently,a new type of sliding mode surface with variable structure was presented based on such features of side window detection kinetic kill vehicle as being only able to output constant switching thrust and having directional attitude constraints,and a bang-bang type of orbit control scheme suitable for terminal intercept was designed.Lyapunov stability theory was adopted to strictly prove the stability of the proposed methods.In order to reduce jet consumption,a sliding dead zone was designed and the value range of parameters in sliding dead zone which can ensure hitting accuracy was studied.Simulation results show that the designed orbit control scheme can meet the accuracy requirements while sliding dead zone can reduce jet consumption.
side window detection;kinetic kill vehicle;terminal guidance;orbit control scheme;sliding mode control;sliding dead zone
2015-06-04;
2015-06-23。
国家自然科学基金(61104194);西北工业大学基础研究基金资助项目(JCT20130101)。
王洋(1989—),男,博士生,研究方向为导航制导与控制。E-mail:zjt219571@163.com
V438
A
1006-2793(2016)04-0588-06
10.7673/j.issn.1006-2793.2016.04.025
猜你喜欢
制导与引信(2022年2期)2022-07-22
水上消防(2022年1期)2022-06-16
无人机(2022年2期)2022-05-20
轻兵器(2022年5期)2022-05-19
小天使·聪聪画刊(2021年3期)2021-09-10
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
民用飞机设计与研究(2019年2期)2019-08-05
航天器工程(2019年1期)2019-03-06
太空探索(2015年6期)2015-07-12
