
一种改进的非合作目标定位方法及其应用验证*
2016-11-01 03:27李婷
电讯技术 2016年4期
李 婷
(中国西南电子技术研究所,成都 610036)
一种改进的非合作目标定位方法及其应用验证*
李 婷**
(中国西南电子技术研究所,成都610036)
针对传统非合作目标定位方法对回波信号的群路径误差敏感和性能不稳定的缺陷,提出了距离信息遗传迭代算法来实现非合作目标的定位。详细介绍了距离信息的遗传迭代算法,并构建了一发三收的多基地探测系统,开展了以电离层不均匀体作为非合作目标的定位试验。通过试验,成功获得了非合作目标的经度、纬度和高度信息。研究表明:该方法具有自我反馈机制,能够避免定位结果陷入局部最优解和算法性能的不稳定,为非合作目标定位的研究提供了一种新的思路。
多基地探测;非合作目标;目标定位;距离信息;遗传迭代算法
1 引言
非合作目标泛指不能提供有效合作信息的目标,包括空间碎片、临时失效与废旧弃用航天器、外层空间飞行物、敌对飞机、敌对舰船、敌对单兵等。基于多基地系统的非合作空间目标定位,通常通过对所有收发站的已知位置参数和信号群路径进行相关处理来实现。与单基地系统相比,利用多基地系统定位非合作空间目标更易于跟踪目标和提高定位精度。
在非合作目标探测过程中,传统的非合作目标定位方法大致分为两类:一类是匹配场处理(Matched-Field Processing,MFP)[1-2];另一类是目标运动分析(Target Motion Analysis,TMA)处理[3-6]。MFP定位技术需要利用传播模型来反复计算拷贝场向量,然后将拷贝场与测量场进行“匹配”,进而实现非合作目标的定位。然而,该方法受到诸如计算量、模型失配、噪声等因素的影响[7],在实际应用中受到一定限制。TMA方法以估计目标的运动参数(如距离、速度等)为主要目的,包括多基地距离信息直接求解方法、纯方位TMA、基于方位和多普勒频率测量的TMA、时空积分TMA、基于方位和时延差测量的TMA等方法[8-11]。其中,距离信息直接求解方法为工程上常用的方法,但该方法本身不具备优化机制,完全依赖于参数的输入,所以存在对回波信号的群路径误差敏感和性能不稳定的缺陷[12-13]。
开展非合作空间目标定位技术的研究对于未来空间电子侦察、空间目标成像、空间预警对抗等具有重要的意义。本文针对传统非合作空间目标定位方法所存在的缺点,提出将距离信息遗传迭代算法作为改进方法,以提供一种更加有效的非合作空间目标定位手段。
2 多基地定位系统
多基地定位系统[14]采用多站联合探测非合作目标,并进行集中式数据处理,探测原理如图1所示,其中Transmitter站为发射站,发射雷达信号;Receiver_ 1、Receiver_2、Receiver_n站为接收站,接收雷达信号。
接收站和发射站之间通过信号同步网络,在时域、频域和空域上构成同步数据传递链,其中多个接收站同时接收经非合作目标散射后的信号。多基地定位系统然后通过对各接收站获取的回波信号分别进行相关处理,以得到发射站-目标-各个接收站的所有群路径信息。

图1 多基地系统的集中式处理结构示意图Fig.1 Schematic diagram of centralized processing in multi-base system
3 非合作目标定位技术
本文基于一发三收的多基地探测手段,采用距离信息遗传迭代算法作为非合作目标定位方法来实现非合作目标定位,其核心任务就是求出非合作目标的位置矢量X=[x y z]T。
在多基地定位系统中,利用多站联合探测方式,多个接收站同时接收回波散射信号,得到群路径参数。结合多基地定位系统已知的各基地位置信息(发射站点的经纬度以及3个接收站点的经纬度),可以得到如下所示的测量方程组:

式中:rT为发射站到非合作目标的距离;i=1,2,3;ri为非合作目标到第i个接收站的距离;ρi是已知量,它对应第i个接收站点获得的非合作目标回波群路径;(x,y,z)为非合作目标的位置信息;(xT,yT,zT)为发射站点位置坐标;(xi,yi,zi)为各接收站点位置坐标。
在实际探测当中,由于每个接收站所接收到的回波信号并不是都来源于非合作目标上的单个散射点,而且受环境条件等因素的影响,使得每个接收站实际测得的群路径与真实的群路径之间存在误差,即

在每个接收站测得的群路径的基础之上,当采用遗传迭代算法来求解非合作目标的位置坐标(x,y,z)时,最重要的是确定目标函数obj(i),即通过遗传迭代算法本身的优化机制,以尽量减小每个接收站实际测得的群路径与真实群路径之间的误差作为目标。对于一发三收的多基地探测手段,目标函数可写作

当obj(1)、obj(2)、obj(3)同为最小值的时候,对应的x、y、z为目标输出值。然而,多目标函数无法达到绝对的统一,因此将多目标函数转换成单目标函数,各目标函数的权重系数分别设为w1、w2、w3,则总的目标函数为


式中:w1+w2+w3=1;权重系数(w1,w2,w3)根据对应的目标函数(obj(1),obj(2),obj(3))的重要程度进行取值。目标函数obj(1)、obj(2)、obj(3)来源于3个接收站点的数据,对于本文试验而言,3个接收站点的数据同等重要,因此权重系数选值为w1=w2=w3=1/3。
距离信息遗传迭代算法的流程如图2所示,详细步骤如下:
(1)分析并确定非合作目标的坐标信息参数集(经度[-180°,180°],纬度[-90°,90°]);
(2)基于非合作目标的坐标信息参数集,根据距离信息和发射接收站点经纬度,采用二进制的方式进行编码;以非合作目标坐标范围中的第T个坐标信息参数集为最初始的群体;
(3)计算此群体中每个坐标信息个体的适应度,并选择适应度高的坐标信息个体进行复制;
(4)接着进行坐标信息个体交叉的操作,再进行坐标信息个体变异的操作,同时确定出非合作目标的坐标范围中的第T+1个群体,以备后用;
(5)若在坐标范围中第T个坐标信息群体满足目标函数条件时,就输出非合作目标的坐标,完成此时定位;若坐标范围中第T个坐标信息群体不能满足目标函数条件时,则返回计算新的种群(即第T+1群体)中每个坐标信息个体的适应度;
(6)对第T+1个群体中的坐标信息个体进行选择、交叉、变异等操作,如此迭代,直到得到满足目标函数的坐标信息个体为止,即得到非合作目标的位置信息。
在多基地定位系统的实际操作中,各基地将所测得的目标数据obj(i)通过数据传递链网络传输到中央处理机,并确定求解目标函数obj;若在坐标范围中第T个坐标信息群体满足目标函数条件时,中央处理机采用本文提出的定位方法来求解非合作目标的位置坐标(x,y,z),完成非合作目标的定位。否则,在坐标参数集范围内搜索,不停地迭代,直到找到某个坐标信息群体满足目标函数条件时,再采用本文提出的定位方法来求解非合作目标的位置坐标(x,y,z),完成非合作目标的定位。
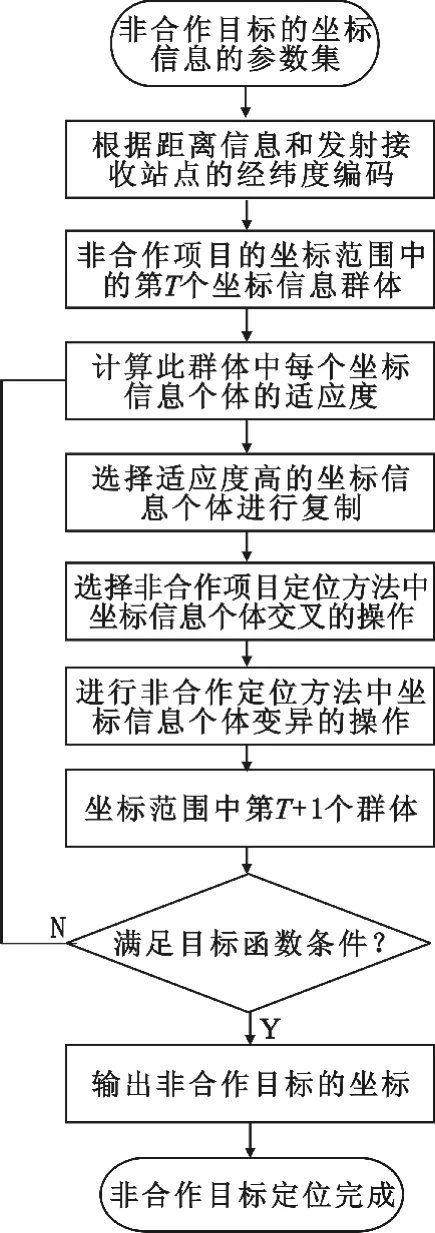
图2 距离信息遗传迭代定位算法的流程图Fig.2 Flow chart of the genetic iterative location algorithm based on the distance information
综上所述,与传统非合作目标定位算法相比,本文所提出的算法自身具有优化机制,可以快速地将解空间中的全体解搜索出,而不会陷入局部最优解的快速下降陷阱,因此具有较好的全局搜索能力,可以有效解决对目标回波信号的群路径误差敏感的问题;并且利用它的内在并行性,可以方便地进行分布式计算,加快求解速度。
4 试验数据分析
为了验证所提出算法的有效性,本文通过对电离层不均匀体这样一种非合作目标进行定位分析。2014年9月11日,开展了对海南省东方市上空自然形成的电离层不均匀体的定位实验,其中发射点位于海南省万宁市,3个接收点分别位于海南省屯昌市、三亚市和澄迈市。
在开展定位试验之前,为了有效地消除各个站之间的时间同步误差对群路径测量的影响,我们开展了时间同步校准试验。
首先,将发射站和接收站放置在同一个位置,构成准单基地探测系统,并且利用接收站接收发射站发射的近场信号,获取一个固定的群时延参数。由于信号在两个站之间的传播距离近似等于0 km,因此在实际探测中通过将获得的群时延减去该固定的群时延,来消除两个站之间的固有时间同步误差。
然后,将发射站和接收站仍然放置在同一个位置,并且构成电离层垂直探测系统。通过比较分析系统探测到的电离层高度值与国际通用的理论值是否吻合,来验证固有时间同步误差去除的有效性。
本次实验的探测结果之一如图3所示,其中发射站和3个接收站同时开始观测。

图3 屯昌、三亚、澄迈接收站的回波探测结果Fig.3 Results of echo detection by the Tunchang,Sanya,Chengmai receiving station
从图3中可以看出:由于发射波束有一定的宽度,导致经电离层不均匀体散射后的回波出现群路径展宽。在实际数据处理中,我们取最大回波信噪比所对应的群路径作为已知参数。因此对于屯昌站,可得到群路径为637.4 km,即ρ1=637.4 km;对于三亚站,可得到群路径为637.4 km,即ρ2= 637.4 km;对于澄迈站,可得到群路径为737.4 km,即ρ3=637.4 km。又由于万宁站、屯昌站、三亚站和澄迈站的位置坐标分别为[110.508 5°E,18.967 5°N]、[110.098 7°E,19.365°N]、[109.493 2°E,18.204 6°N]和[109.998 5°E,19.745 5°N],因此可以得到(xT=194.589 3,yT= 7.172 3,zT=0),(x1=151.129 6,y1=51.373 7,z1= 0),(x2=88.213 8,y2=-77.661 0,z2=0),(x3= 140.286 6,y3=93.684 7,z3=0)。将上述参数代入式(4),并利用所提出的距离信息遗传迭代算法,可以求出电离层不均匀体的散射点在地面上投影的位置为(109.060 7°E,19.130 3°N),散射虚高为280.854 8 km。
图4中,3个黑色实心点所在的位置分别是屯昌、三亚和澄迈3个接收机所在的位置;红色十字架是万宁发射机所在的位置;红色的五角星是海南省东方市所在的位置,也是此坐标系的原点;红色圆圈是估算出的电离层不均匀体的散射点位置。
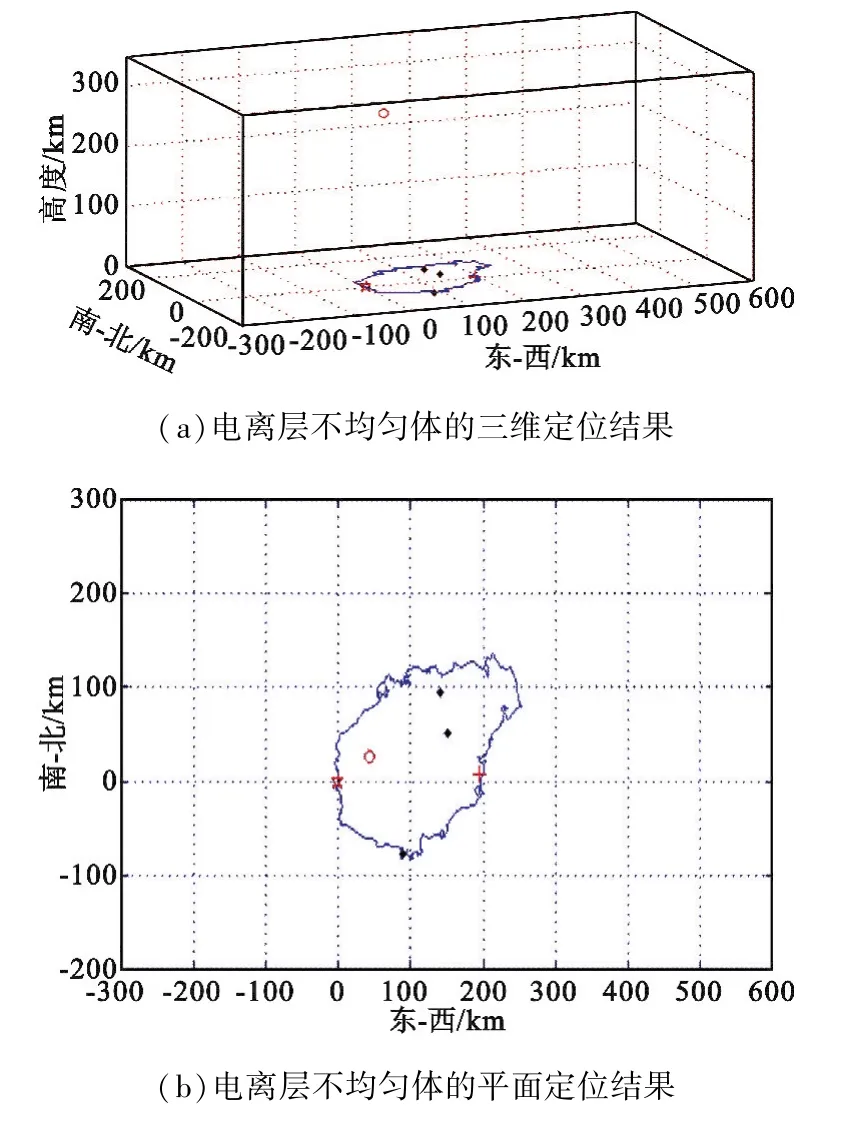
图4 一发三收的电离层不均匀体定位结果Fig.4 Location results of the ionospheric irregularity with the multi-base detection
从图4(b)中可以清晰看到,电离层不均匀体的散射点在地面的投影坐标为(42.3 km,25.28 km),即投影点相对于海南省东方市向东偏42.3 km,向北偏25.28 km。该结论与先验信息相符,成功地验证了本文的算法。
5 结束语
本文提出了一种基于距离信息的遗传迭代算法,与传统的非合作目标定位算法相比,该算法具有自我反馈机制,可以实现全局搜索,找到整体最优解,避免定位结果陷入局部最优解和性能的不稳定性。对电离层不均匀体进行定位的试验数据分析表明:利用所提出的算法可以得到该非合作空间目标的经度、纬度以及高度信息,合理地解决了对回波信号的群路径误差敏感的问题,成功地完成了非合作空间目标的定位。相应的算法和技术也可用于高频段的非合作目标的被动探测系统之中,实现对非协作空间目标的探测与定位,扩展传统测控系统的应用范畴。
[1]CHAUDHURI S,CHATTERJEE S,KATZ N,et al.Detection of blood vessels in retinal images using two-dimensional matched filters[J].IEEE Transactions on Medical Imaging,1989,8(3):263-269.
[2]COLIN M E,AINSLIE M A,DAHL P H,et al.Effect of channel impulse response on matched filter performance in the 2013 Target and Reverberation Experiment[J].The Journal of the Acoustical Society of America,2014,136(4):2297-2297.
[3]XU S,JU Y,ZHANG X.A target motion analysis algorithm based on Doppler frequency shift optimize search[C]//Proceedings of 2015 International Industrial Informatics and Computer Engineering Conference.Xi'an:IEEE,2015:1-6.
[4]MODALAVALASA N,RAO G S B,PRASAD K S,et al.A new method of target tracking by EKF using bearing and elevation measurements for underwater environment[J].Robotics and Autonomous Systems,2015,74(PA):221-228.
[5]SHAO H J,ZHANG X P,WANG Z.Efficient closedform algorithms for AOA based self-localization of sensor nodes using auxiliary variables[J].IEEE Transactions on Signal Processing,2014,62(10):2580-2594.
[6]HORST J,OISPUU M,KOCH W.Accuracy study for a piecewise maneuvering target with unknown maneuver change times[J].IEEE Transactions on Aerospace and Electronic Systems,2014,50(1):737-755.
[7]DONG S M,LIU H B,ZHAO B,et al.Study on method of parallel computing in match field localization[J].Application Research of Computers,2012,29(2):514-517.
[8]DUAN M,YANG Y,WANG W.An RFID data and location parameter joint estimation based on an improved MCMC method[J].Journal of Networks,2014,9(9):2392-2401.
[9]LI B,HE Y,ZUO L,et al.Metric of the application environment impact to the passive UHF RFID system[J]. IEEE Transactions on Instrumentation and Measurement,2014,63(10):2387-2395.
[10]YU Y,MA G,HAO Z,et al.Correlation analysis for screening key parameters for passive system reliability analysis[J].Annals of Nuclear Energy,2015,77(6):23-29.
[11]ZHANG S,ZHU D,HUO K,et al.A new high precision range vernier method for phase-coded radar[C]//Proceedings of 2013 IEEE Cross Strait Quad-Regional Radio Science and Wireless Technology Conference(CSQRWC).Chengdu:IEEE,2013:341-344.
[12]HUANG B,LIU Z,WU L.Maximum likelihood estimation and iterative algorithm for bearings-only target motion analysis[J].Journal of Naval University of Engineering,2013,25(1):54-58.
[13]LYATSKAYA Y,REHFELD K,KADAM D V,et al. Comparison of two techniques for target motion evaluation based on 4DCT images[J].International Journal of Biomedical Engineering and Technology,2012,8(2-3):117-137.
[14]孙仲康.单站无源定位跟踪技术[M].北京:国防工业出版社,2008. SUN Zhongkang.Single station passive location tracking technology[M].Beijing:National Defence Industry Press,2008.(in Chinese)

李 婷(1986—),女,湖南邵阳人,2013年获博士学位,现为工程师,主要从事飞行器测控通信系统总体技术研究工作。
LI Ting was born in Shaoyang,Hunan Province,in 1986.She received the Ph.D.degree in 2013.She is now an engineer.Her research concerns spacecraft TT&C system technology.
Email:liting142@126.com
An Improved Location Method of Non-cooperative Target and Its Application Verification
LI Ting
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
For the drawback that the traditional location method of non-cooperative target is sensitive to the group path error of echo-signal and the performance is instable,the genetic iterative algorithm based on the distance information is presented in this paper to locate the non-cooperative target.The genetic iterative algorithm based on the distance information is introduced in detail.Furthermore,with the multi-base detection,the location experiment of the non-cooperative target which is the ionospheric irregularity is carried out.Through above experiment,the longitude,latitude and altitude of the non-cooperative target can be obtained.The study shows the location technology has feedback mechanism to avoid the location results into local optimal solution and instable performance,which provides a new idea for the study of non-cooperative target location.
multi-base detection;non-cooperative target;target location;distance information;genetic iterative algorithm
TN911
A
1001-893X(2016)04-0372-05
10.3969/j.issn.1001-893x.2016.04.004
李婷.一种改进的非合作目标定位方法及其应用验证[J].电讯技术,2016,56(4):372-376.[LI Ting.An improved location method of non-cooperative target and its application verification[J].Telecommunication Engineering,2016,56(4):372-376.]
2015-09-18;
2016-01-09 Received date:2015-09-18;Revised date:2016-01-09
中国西南电子技术研究所技术创新基金项目(H15015)Foundation Item:Project Supported by the Creative Technology of Southwest China Institute of Electronic Technology(H15015)
**通信作者:liting142@126.com Corresponding author:liting142@126.com
猜你喜欢
今日农业(2022年1期)2022-06-01
煤气与热力(2021年9期)2021-11-06
空间科学学报(2021年4期)2021-08-30
煤气与热力(2021年7期)2021-08-23
空间科学学报(2021年2期)2021-07-21
化工管理(2021年7期)2021-05-13
军营文化天地(2018年2期)2018-04-20
雷达学报(2017年6期)2017-03-26
导航定位学报(2015年2期)2015-06-05
天然气与石油(2015年2期)2015-02-28
