
3自由度高速Delta机器人控制系统设计*
2016-10-29 02:29李丽丽林明勇曹永军周磊
自动化与信息工程 2016年2期
李丽丽林明勇曹永军周磊
(1.顺德职业技术学院 2.广东省智能制造研究所 广东省现代控制与光机电技术公共实验室3.华南智能机器人创新研究院)
3自由度高速Delta机器人控制系统设计*
李丽丽1林明勇2,3曹永军2,3周磊2
(1.顺德职业技术学院 2.广东省智能制造研究所 广东省现代控制与光机电技术公共实验室3.华南智能机器人创新研究院)
基于自行设计的3自由度Delta机器人,设计一种基于上位PC机和运动控制器的控制系统。采用Windows操作系统,利用Indra Works Engineering软件设计MLC25控制器的运动控制程序,运用Visual Studio 2010软件设计上位机界面,开发了3自由度高速Delta机器人控制系统。试验表明,该控制系统运行稳定,操作简易。
Delta机器人;控制系统;控制器
0 引言
与传统串联机器人相比,并联机器人具有结构简单、运动精度高、速度快等优点,已成为目前研究热点之一。Delta机器人是一种高速、轻载的并联机器人,具有承受能力强、运动耦合弱、安装驱动简单等优势,成为工业界和学术界关注的重点[1-2]。在应用方面,少自由度Delta并联机器人更是在食品、药品等分拣应用上有取代人工的趋势。
控制系统是机器人运行的关键,相对于串联机器人,关于少自由度并联机器人的控制系统研究相对较少[3-4]。并且绝大多数传统工业机器人的控制器是专用的,其控制功能由具体特定的任务决定,同时,这些控制器相对比较封闭、开放性差、开发成本较高、周期长[5]。随着计算机技术和运动控制器的快速发展,基于PC+运动控制器/卡的开放式控制系统因具有经济、开发时间短等优点,成为机器人控制系统发展新的方向。
本设计根据研究需求,以上位PC机+下位机器人控制器为核心,构建3自由度高速Delta机器人的控制系统,采用Visual Studio 2010 -MFC开发Delta机器人的上位机界面,由嵌入式运动控制器完成控制任务。
1 控制系统总体设计
高速Delta机器人控制系统需要完成以下功能:1) 上位机负责人机交互,接受用户的指令或指定机器人的运动坐标,读取机器人的状态信息等;2) 下位机(控制器)负责运动规划、机器人运算等;3) 运动系统执行机器人的运动,同时反馈其运动状态,其系统结构如图1所示。

图1 系统结构图
Delta机器人控制系统由硬件和软件两部分组成,硬件是系统设计的基础,决定系统性能和稳定性;软件决定系统功能能否实现及性能的好坏。
2 控制系统硬件设计
2.1 3自由度高速Delta机器人
3自由度高速Delta机器人样机如图2所示,由动静平台、交流伺服电机、3个主动臂,3个平行四边形的从动臂和末端执行器组成。

图2 Delta机器人样机图
交流伺服电机与主动臂的一端固定连接,主动臂的另一端通过万向节与从动臂连接,同时,从动臂的另一端通过万向节与末端执行器连接。在交流伺服电机的运动下,利用主动臂和从动臂使末端器件耦合出3个自由度的运动。
2.2 控制系统硬件组成
高速Delta机器人控制系统硬件主要由上位机、机器人控制器、电机及驱动模块等组成。
上位机选用基于Windows7操作系统的PC机;机器人控制器选用MLC25控制器,其具有机器人控制功能,经济性好、开发时间短,符合开放式控制系统要求;驱动模块选用基于以太网通信的紧凑型驱动器IndraDrive CS;电机模块选用TPM系列电机和减速机一体的TPM010S-035K-6PB1-094C-W4型号电机。
3自由度高速Delta机器人控制系统以PC机和控制器为控制核心,进行伺服控制,其硬件结构原理图如图3所示。上位机PC和控制器通过SERCOSIII进行通讯;控制器与伺服驱动器通过以太网的闭环连接通讯;伺服驱动器一端接三相380 V电压,另一端通过动力线为电机提供动力,并通过编码器线读取电机的信息。
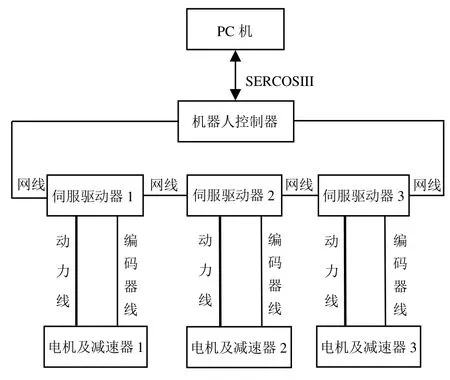
图3 机器人硬件结构原理图
3 控制系统软件设计
3.1 控制系统的主程序
高速Delta机器人控制系统的主程序是软件的主体部分,负责整个控制系统的协调控制工作,通过调用不同的子程序完成不同的工作,其流程如图4所示。
开始主程序后,首先,初始化MLC25控制器,包括各驱动器和电机参数的读取、驱动器和电机的状态检测、CPU的初始化、CPU的参数读取、工作模式选取等;然后,进入待机状态,该状态下,高速Delta机器人仍在运行,等待来自上位机的指令,接收到上位机指令后,判断该指令是门形运动指令还是其他指令,若是抓走门形运动指令,MLC25控制器自动上伺服和Grouded,通过坐标子程序将得到的坐标信息发送给MLC25控制器,控制器根据得到的坐标利用动作子程序进行门形运动,若是其他指令程序,则根据具体指令控制Delta机器人,如上伺服、点运动、状态读取、JOG运动等;最后,得到上位机的退出指令,退出系统。
3.2 控制系统的上位机程序设计
3自由度高速Delta机器人的人机界面在VS2010软件的MFC平台完成,为充分发挥PC机优势,采用Windows7操作系统。在MFC框架下,将MLPI_SDK添加到工程文件内,即可进行相应的操作。3自由度高速Delta机器人的人机界面如图5所示。
如图5所示,连接控制器后,人机界面就可进行其他操作;状态栏显示机器人的当前位置,并可根据用户的需求设置速度、加速度等运动参数;根据门形动作设置坐标即可开始进行门形操作;具有状态指示灯,让用户更加清楚控制系统的状况。
3.3 控制系统的下位机程序设计
下位机主要负责机器人的动作规划和运算,采用Indra Works Engineering编程,编程语言符合IEC61131-3标准的结构式文本语言,工作流程如图6所示。机器人初始化完成后,等待上位机的指令;接收到指令后,读取运动参数和坐标,并将其输入到运动规划中;然后机器人控制器进行逆解运算等;最后等待机器手完成动作。

图5 3自由度高速Delta机器人的人机界面图
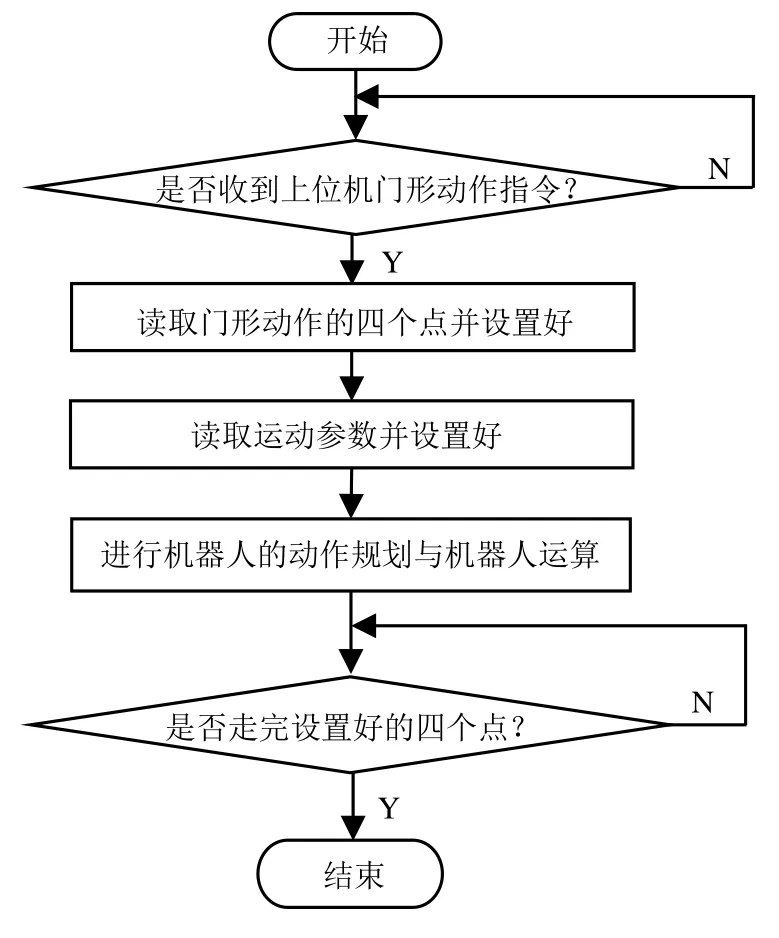
图6 下位机工作流程图
4 试验验证
为测试3自由度高速Delta机器人控制系统性能,设置机器人走门形动作,即A-B-A走法,测试循环为20次。利用Indra Works Engineering软件的示波器功能,读取其速度。测试路程为500 mm长,80 mm宽的门型曲线,试验数据如表1所示。
由表1可知,最快往返一次门型动作所需要时间为600 ms,即每分钟可以完成100次,速度较快。
同时,让Delta机器人循环进行500次以上的门形曲线运动测试,机器人依然能完成测试任务,验证了Delta机器人的控制系统在高速运行的情况下能保证稳定性和可靠性。
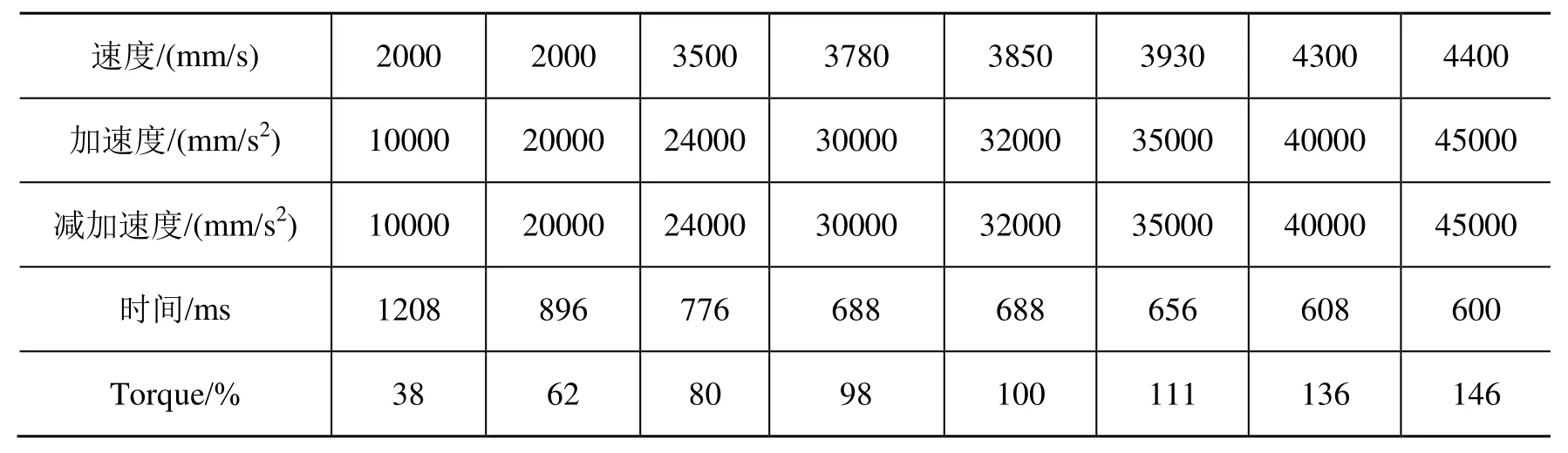
表1 试验数据
5 结语
本文基于PC上位机和机器人控制器下位机的系统控制架构,设计了3自由度高速Delta机器人控制系统。经过试验证明,该控制系统运行稳定,操作简单。
[1] 冯李航,张为公,龚宗洋,等.Delta系列并联机器人研究进展与现状[J].机器人,2014,36(3):375-384.
[2] 牛雪梅.新型3-DOF驱动冗余并联机构动力学建模及其滑模控制研究[D].江苏大学,2014.
[3] 郎需林,靳东,张承瑞,等.基于实时以太网的DELTA并联机械手控制系统设计[J].机器人,2013,35(5):576-581.
[4] 方建军.采摘机器人开放式控制系统设计[J].农业机械学报,2005,36(5):83-86.
[5] 王启春.六自由度开放式工业机器人控制系统设计[D].华东理工大学,2011.
[6] 文怀兴,雷晓丽.采用Trio运动控制器的搬运机器人控制系统研究[J].现代制造工程,2011(4):38-41.
林明勇,男,1989年生,硕士,工程师,主要研究方向:智能控制等。
曹永军,男,1981年生,硕士,高级工程师,主要研究方向:智能控制与系统、机器视觉等。
周磊,男,1983年生,博士,工程师,主要研究方向:智能控制、机器人等。
Design of 3-DOF High Speed Delta Robot Control System
Li Lili1Lin Mingyong2,3Cao Yongjun2,3Zhou Lei2(1.Shunde Polytechnic 2.Guangdong Institute of Intelligent Manufacturing Guangdong modern control and optical electrical and Mechanical Technology Public Laboratory 3.South China Robotics Innovation Research Institute)Abstract: The control system of a 3-DOF delta robot prototype is proposed based on PC and Motion controller. Base on Windows operating system, ML25 motion controller and Visual Studio 2010 software are used to develop the control system platform. The system is reliable running and easy operation according to the experiment results.
Delta Parallel Robot; Control System; Motion Controller
李丽丽,女,1981年生,硕士,工程师,主要研究方向:机器视觉与控制等。E-mail: lilili9922@163.com
广东省科技计划项目(2015B010917001);广东省应用型科技研发专项资金项目(2015B090922008);广东省粤港共性技术招标项目(2013B010134009);佛山市机电专业群开放课题(2015-KJZX133)。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
电子制作(2019年23期)2019-02-23
车迷(2018年12期)2018-07-26
消费导刊(2018年8期)2018-05-25
制造技术与机床(2017年9期)2017-11-27
电子制作(2017年23期)2017-02-02
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
数字技术与应用(2016年9期)2016-11-09
燕山大学学报(2015年4期)2015-12-25
