轮毂电机对汽车瞬态操稳特性的影响
2016-10-29 20:43徐刚庞赟周毅周鋐
计算机辅助工程 2016年4期
关键词:汽车
徐刚 庞赟 周毅 周鋐


摘要: 基于某A级车各总成性能试验数据,利用CarSim建模仿真,并结合整车操作稳定性试验结果验证仿真模型的准确性.依据轮毂电机设计方案,对加装轮毂电机后的汽车进行仿真,分别从开环和闭环的角度评价轮毂电机对汽车瞬态操纵稳定性的影响.结果表明:加装轮毂电机后,汽车瞬态动态响应幅度减弱,响应变迟缓,轨迹跟踪性降低,驾驶负担增加.
关键词: 汽车; 操纵稳定性; 轮毂电机; 参数化建模; CarSim
中图分类号: U461.1文献标志码: B
Abstract: Based on the assembly performance test data of an A-class vehicle, the whole vehicle model is built and simulated by CarSim, and the accuracy of the model is verified combining with the handling behavior test results. According to the hub motor design scheme, the vehicle installed with hub motor is simulated, and the effect of hub motor on vehicle transient handling behavior is analyzed by open-loop and closed-loop evaluations. The simulation results show that, after the vehicle is installed with hub motor, the transient dynamical response is weakened, the response is delayed, the tracking ability is decreased, and the driving burden increases.
Key words: automobile; handling behavior; hub motor; parameterized modeling; CarSim
0引言
近几年,新能源车得到迅猛发展,各大汽车厂家也都尝试采用轮毂电机的驱动方式,如:日本三菱公司通过在后轮安装2部20 kW的轮毂电机,推出Colt EV型电驱车;沃尔沃汽车公司在其C30车型的基础上,采用英国PML公司的轮毂电机,推出C30增程式电动车[1];德国宝马公司也为其Mini Copper车加装PML公司的轮毂电机[2];国内的奇瑞公司通过在后轮加装2部30 kW的轮毂电机,推出瑞麟X1.EV.
然而,轮毂电机的安装会增加非簧载质量,对汽车行驶动力性、安全舒适性、操纵稳定性提出更高要求.日本丰田公司通过优化设计,降低轮毂电机对非簧载质量的影响,并通过控制手段增强车辆的制动稳定性、乘坐舒适性、转向操控性等.[3]英国Protean Electric公司委托英国Lotus公司完成非簧载质量的改变对汽车动力学性能影响的研究.[4]奥地利格拉茨技术大学通过仿真分析不同类型轮毂电机对汽车舒适性和行车安全性的影响.[5]国内,为研究轮毂电机对汽车垂向性能的影响,同济大学相继研制出“春晖”系列车型[6-7];吉林大学依托奇瑞的瑞麟,探索非簧载质量对汽车动力学性能的影响[1].
本文以某A级车各总成(悬架、转向系、轮胎等)性能试验结果为基础,利用动力学软件CarSim建立整车动力学模型,对典型操稳工况进行仿真,并与实车试验结果对比验证该动力学模型准确性后,依据轮毂电机设计方案,改变车辆质量和惯量参数,对加装轮毂电机后的汽车进行瞬态工况仿真,并分别从开环和闭环的角度对加装轮毂电机后的汽车瞬态操纵稳定性能的变化进行评价.
1参数化整车动力学模型建立
基于某A级车悬架总成K&C特性(运动学、弹性运动学特性)测试值,轮胎动态性能(侧偏、外倾特性)测试值,转向系统性能(转向几何、转向传动比、转向干摩擦、转向助力)测试值,以及外饰尺寸测量值和整车转动惯量测量值,在车辆动力学软件CarSim中进行整车动力学建模,对典型操稳工况进行仿真,并与实车试验值[8-9]比较.
图1和2为依据文献[10]方向盘转角阶跃输入瞬态响应试验,按车速约100 km/h,在方向盘峰值转角25°输入下,侧向加速度与横摆角速度时域曲线试验值与仿真值的对比.图3和4为车速约100 km/h,依照文献[10]方向盘中间位置试验,方向盘力矩梯度特性曲线试验值与仿真值的对比.在图2中,试验与仿真曲线在阶跃峰值点幅值基本一致,无相位偏差;响应稳定后,两者误差在10%以内;在图4中,试验与仿真曲线的力矩梯度值较一致,两者误差在10%以内,说明汽车动姿态响应和方向盘力矩反馈仿真结果达到满意精度,为后续研究提供保障.
2轮毂电机对整车操纵稳定性瞬态性能的仿真
2.1考虑轮毂电机整车模型的建立
由于本文不进行底盘结构形式的修改,在保持悬架、转向系统和轮胎性能参数不变的前提下,换装轮毂电机后,原车非簧载质量、整车转动惯量及质心位置是对操稳性改变最显著的参数.轮毂电机质量设计值约30 kg,分别安置在4个轴头处,其对转动惯量的改变按式(1)计算,对质心高度的改变按式(2)计算.Ijj=Ijj+4i=1mir2ji(1)式中:Ijj为安装轮毂电机前(原车)绕三轴(侧倾/横摆/俯仰)的转动惯量;Ijj为安装轮毂电机后(设计车)的转动惯量;rji为各轮毂电机至3条轴线的距离.H′=(H×M+Hhub×m)/(M+m)(2)式中:H′为设计车的质心高度;H为原车的质心高度;Hhub为轮毂电机安装高度;M为原车整备质量;m为轮毂电机总质量.原车及设计车后的质量、惯量参数见表1.
2.3考虑汽车运动及响应反馈的闭环评价
对瞬态操纵的评价还应包含人-车-路的交互作用.ISO的规范中以双移线[11]和避障[12]试验,结合主观评价评估汽车运动和响应反馈的综合性能.
文献[13]和[14]以14类车在驾驶模拟器上获取的主观评价结果,采用“总方差评价方法” [15],建立反映驾驶主观感受的客观评价体系.体系中包含汽车的轨道跟踪精度、驾驶员操作负担、翻车危险性、侧滑危险性以及驾驶员路感等指标.本文对原车和设计车分别进行车速为80 km/h的双移线工况仿真(见图7),并采用文献[16]列出的标准门槛值和权值,计算各评价指标,见表3.由表3可知:加装轮毂电机后车辆轨迹跟踪性下降.虽然轨迹误差指标(横向位移偏离规划路径的方差)略有上升(原车为3.558 8,加轮毂电机为3.437 4),但方向误差指标(纵向车速与侧偏角速度乘积)下降明显(原车为1.594 9,加轮毂电机为2.201 8).这是因为非簧载质量的增加影响汽车瞬时的行驶方向,进而影响道路跟随性.反映驾驶员负担指标的项,设计性能下降也十分显著.无论是方向盘操纵的繁忙程度(方向盘转角频率)还是方向盘力矩沉重程度,加装轮毂电机后均增加驾驶负担.
3结束语
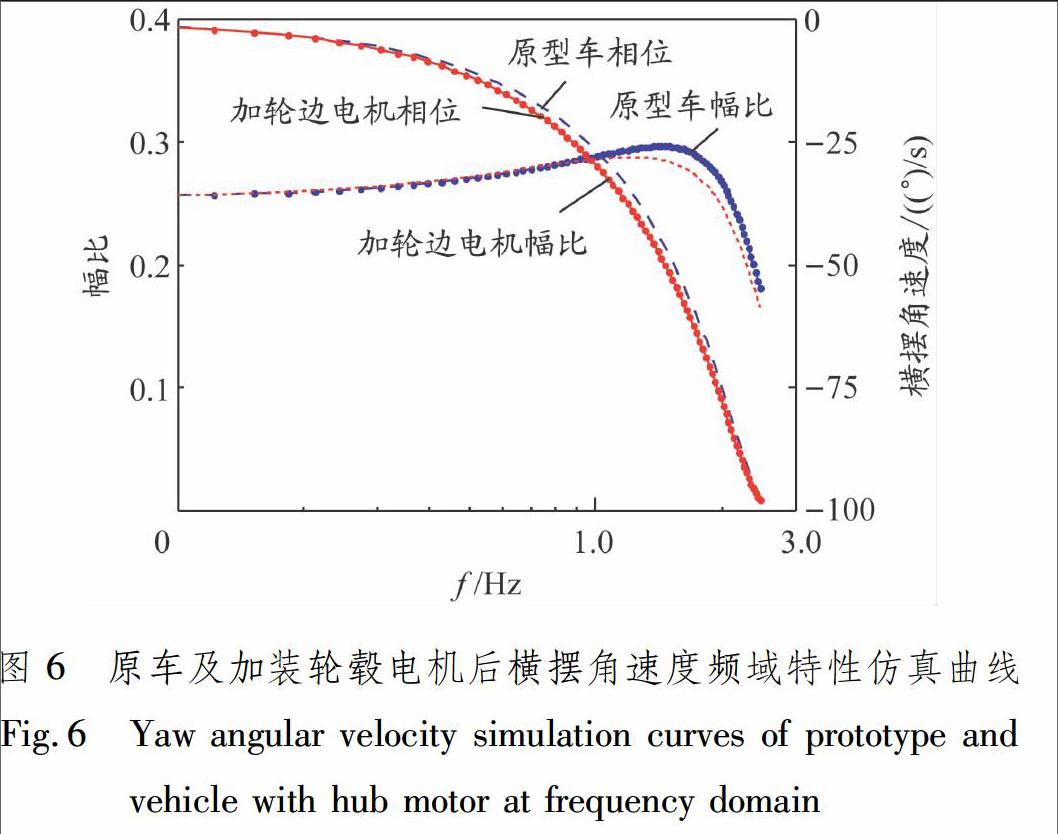
本文以某A级车总成性能试验参数为基础,在CarSim中建立整车动力学模型,对典型操稳工况进行仿真,并与实车试验值比较,验证该动力学模型的准确性.依据轮毂电机设计方案,改变车辆相应参数,进行典型瞬态操纵稳定性工况的仿真.由汽车响应的开环评价可知,时域和频域结果均表明加装轮毂电机后,汽车瞬态运动(侧向加速度、横摆角速度)的响应幅值下降,反应迟滞度增加,振荡效果降低;由汽车动态响应反馈的闭环评价可知,加装轮毂电机后,汽车人-车-路操纵的总体性能下降,主要体现在轨迹跟踪性和驾驶负担性2项指标上.以上仿真研究结果还需通过后续实车试验进行验证.参考文献:
[1]汪志强. 轮毂电机对车辆操纵稳定性和平顺性的影响研究[D]. 长春: 吉林大学, 2014.
[2]NEFF J. PML MINI QED boasts 640 in-wheel electric horsepower[EB/OL]. (2006-07-21)[2016-05-20]. http://www.autoblog.com/2006/07/21/pml-s-mini-qed-boasts-640-in-wheel-electric-horsepower.
[3]MURATA S. Vehicle dynamics innovation with in-wheel motor[DB/OL]. (2011-05-17)[2016-05-20]. http://papers.sae.org/2011-39-7204.
[4]Lotus Engineering. The effect of the hub motors on vehicle dynamics [EB/OL]. (2013-07-30)[2016-05-20]. http://www.proteanelectric.com/wp-content/uploads/2013/07/The-Effect-of-Hub-Motors-on-Vehicle-Dynamics.pdf, 2010.
[5]ROJAS R. Mechanical design of in-wheel motor driven vehicles with torque-vectoring[J]. (2011-10-14)[2016-05-20]. http:// papers.sae.org/2011-36-0132: 1-17.
[6]夏存良, 宁国宝. 轮边驱动电动车大质量电动轮垂向振动负效应主动控制[J]. 中国工程机械学报, 2006, 4(1): 31-34.
XIA C L, NING G B. Active control of vertical vibration negative influences induced by high unsprung mass of in-wheel motor electric vehicle[J]. Chinese Journal of Construction Machinery, 2006, 4(1): 31-34.
[7]宁国宝. 轮边驱动系统垂向振动负效应的抑制方法研究[D]. 上海: 同济大学. 2006.
[8]王蠡, 项党, 陈璟, 等. 扭力梁后桥总成参数对整车转向特性的影响分析[J]. 汽车工程, 2011, 33(1): 60-64.
WANG L, XIANG D, CHEN J, et al. An analysis on effects of parameters of twist-beam rear axle on vehicle steering characteristics[J]. Automotive Engineering, 2011, 33(1): 60-64.
[9]刘拥军, 王蠡, 任凯, 等. 麦佛逊悬架总成参数对整车操控性能的影响分析[J]. 汽车技术, 2011(8): 22-28. DOI: 10.3969/j.issn.1000-3703.2011.08.007.
LIU Y J, WANG L, REN K, et al. Analysis on effect of mcpherson subsystem parameters on vehicle handling property[J]. Automobile Technology, 2011(8): 22-28. DOI: 10.3969/j.issn.1000-3703.2011.08.007.
[10]汽车操纵稳定性试验方法: GB/T 6323—2014[S].
[11]Passenger cars: Test track for a severe lane-change manoeuvre: Part 1 Double lane-change: ISO 3888-1: 1999[S].
[12]Passenger cars: Test track for a severe lane-change manoeuvre: Part 2 Obstacle avoidance: ISO 3888-2: 2002 [S].
[13]宗长富, 郭孔辉, 李铂. 汽车操纵稳定性的理论预测与综合评价[J]. 汽车工程, 2001, 23(1): 5-12. DOI: 10.3321/j.issn:1000-680X.2001.01.002.
ZONG C F, GUO K H, LI B. Theoretical prediction and comprehensive evaluation for vehicle handling stability[J]. Automotive Engineering, 2001, 23(1): 5-12. DOI: 10.3321/j.issn:1000-680X.2001.01.002.
[14]宗长富, 刘蕴博, 孔繁森. 汽车操纵稳定性的模拟器闭环评价与试验方法[J].汽车工程, 2001, 23(3): 205-208. DOI: 10.3321/j.issn:1000-680X.2001.03.015.
ZONG C F, LIU Y B. KONG F S. Closed-loop Evaluation and Test Method of Vehicle Handling and Stability on Driving Simulator[J]. Automotive Engineering, 2001, 23(3): 205-208. DOI: 10.3321/j.issn:1000-680X.2001.03.015.
[15]郭孔辉. 汽车操纵动力学[M] . 长春: 吉林科学技术出版社. 1991: 1-7.
[16]李志魁. 基于CarSim的整车动力学建模与操纵稳定性仿真分析[D]. 长春: 吉林大学, 2007.(编辑于杰)第25卷 第4期2016年8月计 算 机 辅 助 工 程Computer Aided EngineeringVol.25 No.4Aug. 2016
猜你喜欢
汽车与安全(2019年9期)2019-11-22
汽车与安全(2019年8期)2019-09-26
汽车与安全(2019年5期)2019-07-30
情感读本·道德篇(2019年2期)2019-05-09
儿童故事画报·智力大王(2017年10期)2018-03-14
儿童时代·快乐苗苗(2017年7期)2018-01-24
创新作文(1-2年级)(2017年3期)2017-09-06
作文大王·低年级(2016年4期)2016-04-18
决策探索(2014年21期)2014-11-25
学苑创造·A版(2009年6期)2009-12-07