仿人眼变焦系统的设计
2016-10-27 05:49金礼伟
装备机械 2016年1期
□金礼伟
上海电气集团股份有限公司 中央研究院 上海 200070
仿人眼变焦系统的设计
□金礼伟
上海电气集团股份有限公司 中央研究院上海200070
根据人眼变焦原理及方法,通过模拟人眼变焦功能的特性,研制出一种小型的变焦透镜。设计了仿人眼变焦系统的整体结构和CCD图像传感器的整体电路,绘制了电路的PCB图,并对其光学系统进行分析,结合光学透镜组合公式计算出焦距的变化范围及光学参数,实现了对透镜的焦距调节和图像采集。
科学研究及统计表明,人类感知客观世界80%~90%以上的信息是通过人眼视觉系统完成的[1]。然而,根据世界卫生组织的统计,全球失明人口共4 500万。中国约有900万盲人,占全世界盲人总数的1/5左右。眼部疾病直接导致病人无法像正常人一样通过眼睛有效获取外界信息,按照当前的医学技术发展水平,当眼球遭受不可逆的损害而光感完全丧失后,无法通过手术让患者恢复视力。因此,创造人工视觉帮助盲人重获视觉的研究是一大挑战,也存在着巨大的现实意义和商用价值,值得众多研究者去尝试和探索。仿人眼视觉假体是一种通过刺激视觉神经系统,使失明患者重新获得视觉的人工器官。仿人眼的研究方向主要为仿人眼视觉采集系统、仿人眼视觉认识系统、仿人眼视觉神经系统等。根据人眼视觉变焦的特性,模拟人眼挤压晶状体,研制出一种小型的变焦透镜,为仿人眼视觉认识系统、仿人眼视觉神经系统提供前端的输入信号。
1 变焦系统的现状
人类在20世纪60年代初期就开始用控制系统理论来理解和研究眼球运动系统。随着科技的发展和医学的进步,以及对眼睛的结构和生理功能认识的加深,人们对于机器视觉的功能可以进一步集成,且对于眼睛的一些功能可以用算法来实现。而且,随着机器视觉的广泛应用,对于机器视觉的研究也越来越结合实际的功用而不是纯理论的研究。因此,近十几年来对于机器视觉研究的界限失去了准确的划分,取而代之的是根据应用模仿了人眼的全部或一部分功能。人的眼睛有很多特殊的功能,变焦特性是其中之一。人眼对视觉信息采集是依赖类似照相机成像的光学系统实现的,笔者根据人眼的变焦功能设计了仿人眼变焦系统。
所谓的变焦能力,包括光学变焦(Optical Zoom)与数码变焦(Digital Zoom)两种。传统光学变焦成像系统存在结构复杂、体积笨重、机械磨损严重、加工难度大等缺点[3],而数码变焦只能将原先的图像尺寸裁小,让图像在LCD屏幕上变得比较大,但并不会使细节更清晰。柔性变焦透镜无需机械移动即能实现焦距的调节,具有结构紧凑、控制灵活、制造成本低、无机械磨损、易于集成等诸多优点,有望克服传统光学系统所面临的困难[3]。
综合现阶段研究成果,变焦透镜按照驱动方式不同可分为以下几种类型:电机驱动、智能材料驱动、微型液压泵驱动,以及电场作用等。若按照变焦透镜物理状态则可划分为液体型与固态型变焦透镜。不同的工作方式,变焦效果有所差异,变焦过程也不尽相同,但大部分最终都是通过改变透镜表面形状,使透镜表面曲率发生变化来实现变焦的目的。另外也有通过利用材料特性控制电压大小,来改变材料的折射率,进而实现焦距变化的。不同的工作类型与驱动方式适用于不同的应用场合。
目前国际上研制的液体变焦透镜模型(如图1所示)主要有以下几种:①充液型变焦透镜,它通过改变注入腔体内液体的体积来改变腔体顶面薄膜的曲率,从而达到调节焦距的目的;②基于液晶的微变焦透镜,它将透镜置于液晶氛围中,通过改变施加的电压来调节液晶的折射率,从而实现对透镜焦距的控制;③基于介质电润湿的流体变焦透镜,它利用外加电压来调节液面的曲率,进而改变透镜的焦距[4]。

图1 液体变焦透镜
以上几种模型既各有优点又各有不足。充液型变焦透镜结构简单、价格低廉,但这种透镜需要一个额外的泵来提供压力以改变液体顶面薄膜的曲率,如果压力过大会给弹性薄膜造成毁灭性的破坏。基于液晶的变焦透镜易于实现阵列化,但是液晶在电场中的非均匀性会造成较大的光学失真。基于介质电润湿的流体变焦透镜结构小巧,折射率变化范围大,但这种变焦透镜所采用的材料价格昂贵,实验装置复杂。
2 仿人眼变焦系统设计
2.1系统的功能模块组成
人眼球光学系统是一个典型的透镜组合,它由透镜角膜和晶状体组合而成。通过睫状肌收缩驱动晶状体改变形状,从而实现晶状体焦距的变化,即眼球系统焦距的变化,从而实现使不同距离处目标物体在视网膜上清晰成像。其成像特点可以概括为:晶状体焦距可变,而接收器(视网膜)位置固定[5]。
对比人眼变焦功能,仿人眼变焦系统采用液体变焦透镜,通过变焦机构挤压透镜表面,改变透镜曲率来达到变焦效果。由此可知,仿人眼变焦系统主要包括以下部分:图像传感器、变焦透镜、驱动装置,以及支撑结构等。
图像传感器与人眼中视网膜的功能相似,是视觉系统不可或缺的重要元件。图像传感器将转换获取的数据传输至中央处理器,等待进一步的处理后获得最终的图像信息。仿人眼装置结构设计中对结构尺寸、成像质量要求高,需要以尽可能小的尺寸得到尽可能好的成像质量。在仿生眼球的机构中,视网膜拟采用Sony公司的平面960H CCD芯片传感器ICX669AKA,该系列芯片尺寸小,集成化程度高,直接输出数字信号,便于开发。在重要元件尺寸及安装方式确定的基础上,仿人眼要尽量模仿人眼眼球实际尺寸大小,实现其集成化设计。图像经过镜头传递到CCD传感器(ICX669AKA)上,CCD传感器所得到的信号经模拟前端处理单元(CXD5148GG)初步处理后传到数字信号处理器(CXD4129GG),再由数字信号处理器输出模拟视频信号和数字视频信号,然后传到显示装置或视频转换芯片等进行下一步处理。
变焦透镜主要由五部分组成,如图2所示。五部分的材料为聚甲基丙烯酸甲酯(PMMA)、聚二甲基硅氧烷(PDMS)、苯乙烯-乙烯-丁烯-苯乙烯嵌段共聚物(SEBS)、高密度聚乙烯(HDPE)和聚对苯二甲酸丁二醇酯(PBT)。第一部分为PMMA透镜,第二部分为HDPE变形环,第三部分为PBT位移环,第四部分为SEBS透镜,第五部分为PDMS液体。其中,前三部分均为高透明度材质,且折射率、传播率等光学性能均优异。PDMS与PMMA的折射率n1、n2分别是1.405、1.485。利用透明PMMA、硅橡胶PDMS和弹性体SEBS材料设计组合而成的变焦透镜,具有透光性好的特点。通过驱动装置控制变焦透镜曲率半径变化,可以实现连续可控变焦。

图2 变焦透镜
驱动装置的选择直接影响整体结构尺寸大小、驱动及其控制方式等,主要有以下几种实现方式:微型直线电机、微型泵、超磁致伸缩材料、压电材料和智能材料等。压电材料具有精度高、反应迅速和抗干扰能力强等优点,由它所组成的驱动与控制装置结构简单、反应敏捷。压电驱动器利用逆压电效应,将电能转变为机械能或机械运动。因此选用环形压电陶瓷HPSt150/20-15/25,作为驱动装置。
支撑结构主要用于支撑、组装各个部件,整体结构尺寸为45 mm×45 mm×70 mm,如图3所示(电路板未装配)。

图3 整体结构三维剖视图
2.2光学性能分析
正常人眼的视角大致数据为向外95°,向内60°,向上60°,向下75°。虽然人眼睛的视场角度可达到150°,但可以同时清晰地观察物体只有在视轴周围6~8°的范围。因此,在观察目标物体时,眼球会自动旋转到视轴对准目标。人眼光学系统的基本特征参数见表1。
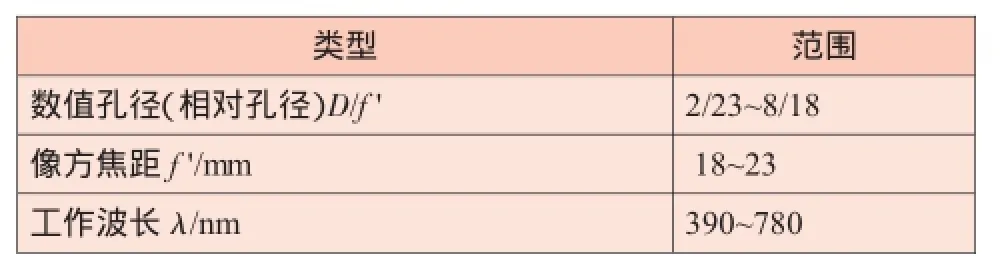
表1 人眼光学系统基本特征
其中,根据理想光学系统中厚透镜的基本理论知识,SEBS透镜是可以看作焦距为f的平凸透镜与焦距为-f的平凹透镜的组合,即凹凸透镜。即此凹凸薄透镜相当于平行板玻璃,实际上是焦距为无限大的透镜。平行的入射光线通过平行玻璃板之后仍然是平行的出射光线。
变焦透镜可以近似看作双平凸透镜的组合,其中位于上部的平凸透镜的球面曲率半径为r1,位于下部的平凸透镜的球面曲率半径为r2。由于PDMS与PMMA的折射率相差仅为0.08,计算时假设n=n1=n2=1.44。
由组合透镜的光学知识可知组合透镜的焦距为[5]:

式中:r1、r2分别为上下两球面半径;d为透镜厚度,即对称轴上两球面顶点距离。
通过环形压电陶瓷对变焦透镜的PBT位移环施加压力,因为PBT的弹性模量是HDPE的10倍多,PBT的截面面积是HDPE的2倍多,HDPE的厚度是PBT的2倍多,因此施加相同的力所产生的压缩值HDPE是PBT的40倍多。因此,PBT位移环的被压缩量可以忽略,可以看作在驱动装置的作用下发生纯位移变化。在驱动装置的作用下,HDPE变形环被压缩,因此,中间腔内体积发生变化。但是由于中间为PDMS液体,体积可以看作不能被压缩,产生压力,且PMMA的弹性模量远大于SEBS的弹性模量,因此会改变SEBS的形状。
若变形后为非球面,假设将变焦透镜表面形状用球面代替类似抛物面的非球面,在最大位移h及原始半径r0相同情况下,Z方向最大的位移误差可用以下表达式描述[6]:

式中:h为拱高。
由上式及参数数据可知,ΔZmax<3 μm,可将变形后透镜表面当作标准的球面进行分析处理。
由于整个挤压变形过程中液体体积是保持不变的,利用球冠所对应的球缺体积公式(Vqq)为:

式中:Vqq为球缺体积;R为球面半径。
因此,考虑实际d的大小,可得驱动器位移与变焦透镜焦距之间的关系:

表2 位移与焦距关系
由表2可以看出工作位移越小,等量位移的焦距变化越大,体积变化基本相近。而压电陶瓷的位移为压缩位移,即压电陶瓷的位移越大,HDPE的压缩量越小。压电陶瓷的工作位移为0~24 μm,符合系统要求,驱动器的工作电压为0~112.5 V,可以采用成熟的压电陶瓷驱动器进行外接输入电压。
仿人眼瞳孔有效直径D为5 mm,像方焦距变化范围为15.91~24.02 mm。
另外,视场角2ω计算公式为:

式中:d'为画幅的对角线长度;f'为镜头的焦距。最终系统的光学系统技术参数如表3所示:

表3 仿人眼光学系统技术参数
3 结论
根据人眼变焦原理及方法,通过模拟人眼变焦功能特性,模拟人眼挤压晶状体,研制出一种小型的变焦透镜。设计了仿人眼变焦系统的整体结构,以及CCD传感器的整体电路;绘制了电路的PCB图,并对其光学系统进行分析;结合光学透镜组合公式,计算出焦距的变化范围及光学参数,实现了透镜的焦距变化和图像采集。本系统具有机械结构简单、零件少、液体工作压力小、变焦性能好、整体结构尺寸小等特点,实现了模仿人眼变焦和采集图像的视觉功能,具有较大的市场潜力和医学应用价值。
[1]毛晓波,陈铁军.仿生型机器视觉研究[J].计算机应用研究,2008,25(10):2903-2905.
[2]SHI J J,STRATTON Z,LIN S-C S,et al.Tunable Optofluidic Microlens through Active Pressure Control of an Air Liquid Interface[J].Microfluidics and Nanofluidics,2010,9(2):313-318.
[3]贾书海,唐振华,董君,等.柔性变焦透镜发展现状[J].中国光学,2015,8(4):535-547.
[4]胡晓东,曲超,张世国,等.电润湿离子液体变焦透镜[J].光电工程,2012,39(2):53-58.
[5] 岳树盛.工程光学[DB/OL].http://www.doc88.com/p-5 00834767328.html.
[6] REN H W,FOX D,ANDERSORY A,et al.Tunable-focus Liquid Lens Controlled Using a Servo Motor[J].Optics Express,2006,14(18):8031-8036.
According to the zoom principles and methods of human eyes and by simulating the functional characteristics on human eye zooming,a compact zoom lens are developed with the design of the monolithic construction of the humanoid eye zoomsystemand the integrated circuit for CCD image sensor and its PCB circuit diagram while its optical system is analyzed.By calculating the range of focal length and optical parameters in conjugation of combinational formula of the optical lens adjustment of the focal length of the lens and image acquisition could be achieved.
仿人眼;变焦透镜;设计
Humanoid Eye;Zoom Lens;Design

Q692
B
1672-0555(2016)01-017-05
2015年10月
金礼伟(1990—)男,本科,助理工程师,主要从事MES、智能调度、机器人调试、仿人眼等研究工作
猜你喜欢
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
锦绣·上旬刊(2020年3期)2020-06-08
快乐语文(2019年9期)2019-06-22
中学生数理化·八年级物理人教版(2018年11期)2019-01-31
摄影之友(影像视觉)(2017年10期)2017-11-07
美与时代·城市版(2016年12期)2017-04-26
优雅(2016年12期)2017-02-28
大众摄影(2016年12期)2016-12-07
电影故事(2016年5期)2016-06-15