应用方位反向技术提取反射镜零重力面形
2016-10-26 05:21:23杨利伟李志来薛栋林董得义樊延超曾雪锋
中国光学 2016年5期
杨利伟,李志来,薛栋林,董得义,樊延超,曾雪锋
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
应用方位反向技术提取反射镜零重力面形
杨利伟*,李志来,薛栋林,董得义,樊延超,曾雪锋
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
为了预估碳化硅反射镜在空间零重力环境下的面形精度,本文开展了在地面环境下利用方位反向技术提取碳化硅反射镜零重力面形的研究。首先,介绍了方位反向技术提取零重力面形的理论依据;其次,利用有限元分析软件,分析了方位反向对反射镜面形的影响;然后,按照试验流程,先后检测了反射镜在0°和180°状态的面形精度,计算两次检测数据的平均值,得到了反射镜零重力面形。结果表明:反射镜地面零重力面形误差RMS值为12.3 nm,能够满足设计指标要求。最后,对数据可信度进行了分析,确认了试验数据真实可信。该结果预示了反射镜在空间零重力环境下的面形精度,对反射镜光学加工与装调有重要的指导意义。
方位反向;碳化硅反射镜;零重力面形;光学检测
1 引 言
为保证空间光学遥感器在轨运行时的成像质量,各反射镜面形误差应满足设计要求。但是在空间光学遥感器入轨之前,需在地面完成加工、装调、集成等一系列工作。由于工作环境不同,反射镜的面形误差存在差别。光学元件越大,这种差别越明显。在地面重力场工作时,反射镜受重力影响,产生弯曲变形,通过光学加工、检测等手段,可以使反射镜面形误差满足使用要求;在轨运行时,重力环境为零,反射镜光学表面在重力释放的作用下出现反弹,面形误差会发生变化,由于没有在轨检测手段,无法获取在轨运行时的面形误差,也就无法得知面形误差是否满足使用要求。为了确保入轨后反射镜面形满足使用要求,国内外常见的做法如下:设计阶段,利用有限元分析软件,设计出一套刚度足够高的反射镜组件,使得重力引起的镜面误差远小于在轨运行时的使用要求;光学加工阶段,将镜面加工至足够高的精度,使得加工残差远小于地面检测时的使用要求;这样可以确保反射镜随遥感器入轨后,面形误差在加工残差及重力释放共同作用下,仍能满足使用要求[1-7]。但是,经验表明:有限元分析结果与实际检测结果会有一定差异,实际检测结果通常会大于有限元分析结果。因此,有必要在地面检测过程中对在轨时的零重力面形误差进行验证,以确定反射镜入轨后面形是否仍满足设计要求。
目前,方位反向技术是获取反射镜零重力面形的重要手段。国内外相关研究主要集中于单镜的方位反向。E. E. Bloemhof等人[8]采用方位反向技术提取了方位改变后PT-M1反射镜的零重力面形,检测了采用两种不同支撑方案的PT-M1面形,得到的零重力面形误差RMS值分别是5.7 nm和3.8 nm,两个值都在允差值以内。目前,利用该技术提取组件级反射镜零重力面形尚未见报道。如果能够应用该技术提取组件级反射镜的零重力面形,便可以此为输入,指导光学加工,从而获取高精度的组件级反射镜零重力面形。本文以此为指导思想,开展了相关试验,从地面检测数据中获取了反射镜零重力面形,试验结果对反射镜的光学加工与装调有重要的指导意义。
2 方位反向技术
方位反向技术是验证反射镜重力释放后面形精度的关键技术,其基本原理如下:

(1)
(2)
式中,ΔGθ表示方位变化引起的面形误差高度数据变化量。
由文献[10]可知,反射镜沿轴向的自重变形可以用下来表示:
(3)
式中,dθ_A表示反射镜沿轴向的自重变形,θ表示反射镜的光轴与重力方向夹角(以下简称方位角),如图1所示,dA表示重力方向平行于光轴时反射镜轴向的自重变形。由式(3)可知,如果反射镜的方位发生改变,则重力引起的轴向自重变形将发生变化。方位变化引起的轴向自重变形变化量可以用下式来表示:
(4)
式中,Δdθ_A为方位变化引起的轴向自重变形变化量,Δθ=180°为方位角的变化量。特别地,当Δθ=180°时,方位变化引起的轴向自重变形变化量为:
(5)
当镜体方位旋转180°之后,方位变化引起的轴向自重变形变化量的大小为初始值的两倍,但方向与之相反。

图1 反射镜方位角示意图 Fig.1 Schematic of orientation angle of mirror
由式(5)可得:
(6)
由式(2)和式(6)可得:
(7)
也就是说,地面检测时重力引起的反射镜镜面变形近似等于方位反向前后两次检测结果之差的一半。
如果从检测数据中将重力引起的面形误差去除,便可得到重力载荷为零的面形误差高度数据,称之为地面零重力面形。这是我们想要得到的数据。很显然,存在如下等式:
(8)
式中,G0表示地面零重力面形。由式(7)可得,
(9)
地面零重力面形误差等于方位反向前后两次检测结果的平均值。它是一个假想值,无法通过检测手段直接获取,只能通过平均两次检测结果来获取。
3 仿真分析与试验
3.1研究对象
本文的研究对象为某空间光学遥感器反射镜组件,镜面尺寸为1 m量级,镜体材料为SiC。反射镜采用背部三点支撑方案,组件结构形式如图2所示,主要包括反射镜、柔性支撑、基板三部分,材料特性见表1。在进行方位反向提取零重力面形之前,反射镜面形精度已加工至1/40λ(λ=632.8 nm)以内,满足光学系统提出的波前差优于1/40λ的使用要求。

图2 反射镜组件结构方案 Fig.2 Structure sketch of mirror assembly

材料密度(ρ)/(103kg·m-3)弹性模量(E)/MPa泊松比(μ)分布位置SiC3.14000000.17反射镜TC44.441090000.29柔性支撑SiC/Al2.942130000.23基板
3.2流程
利用方位反向技术提取反射镜零重力面形的试验流程如图3所示,该流程主要包括4个阶段:初始状态面形检测、翻转与调整、翻转后状态面形检测、数据处理。首先将反射镜组件按照地面装调状态(以下称之为0°状态)固定在检测工装上,利用干涉仪检测此状态的镜面面形精度;检测完毕后,利用调整工装,将反射镜组件翻转180°,使作用于镜体上的重力反向,待系统稳定后,再利用干涉仪检测此状态(以下称之为180°状态)的镜面面形精度。检测完毕后,对检测数据进行处理,以获取地面零重力面形。试验能否成功,取决于反射镜面形的检测精度和数据处理时面形图的对准精度。环境扰动会影响反射镜面形的检测结果[11],为了减少环境扰动对检测结果的影响,保证面形误差检测精度,采用多次测量求平均值的方法,每个方位重复检测50次;为了保证面形图的对准精度,在镜面上粘贴了3个标记点,对准时以标记点作为基准。

图3 提取反射镜零重力面形试验流程 Fig.3 Flow chart of extracting zero-gravity surface figure of mirror
3.3仿真分析
在地面加工、检测过程中,反射镜方位变化会引起面形误差检测值发生变化,我们可以对方位反向前后的面形变化量进行预示分析。由式(6)可知,反射镜从0°状态翻转到180°状态,方位变化引起的面形变化量为自重变形的两倍,那么方位变化对面形影响的仿真分析可以转化为重力载荷对面形影响的仿真分析,不同的是,此时需要施加在反射镜上面的重力载荷为2 g。
仿真分析采用的软件为MSC公司的Patran与Nastran。将几何模型导入Patran中,对模型进行细致的网格划分,最终的有限元模型如图4所示,模型材料属性见表1。对整个模型施加2 g重力载荷,方向与装调时的重力方向相反。经有限元分析及面形误差计算,得到的反射镜镜面变形云图如图5所示,由图可知:镜面面形误差PV值为0.122λ(77.2 nm),RMS值为0.021λ(13.3 nm),也就是说,方位反向后,反射镜的面形变化量RMS值为13.3 nm。

图4 反射镜组件有限元模型 Fig.4 Finite element model of mirror assembly

图5 反射镜镜面变形云图 Fig.5 Deformation graph of mirror surface
3.4试验方案
开展方位反向试验时需解决两个实际问题:一是如何保证装配力准确反向,二是如何实现反射镜的方位反向。
由文献[8]可知,如果外力不能准确的反向,镜面上将出现局部不规则的变形,从而导致试验失败。因此,在试验时必须保证装配力能够准确地反向。实现此目的最好的办法是反向前后,反射镜组件始终与工装连接在一起。
为了实现反射镜的方位反向,本文采取的方案是:将反射镜组件固定在工装上,测完一个方向后,不拆卸反射镜组件,将检测工装绕光轴旋转180°,然后再进行检测。试验方案示意图如图6所示,图中的三角符号是为了说明翻转前后反射镜及调整工装的方向。

图6 试验方案示意图 Fig.6 Diagram of test scheme
3.5试验结果与讨论
试验采用的面形测试仪器为Zygo公司的 GPI激光干涉仪。按照试验流程,开展了0°状态和180°状态的反射镜面形误差检测。0°状态的面形检测现场照片如图7所示,两种状态的检测结果如图8所示。由图8可知,0°状态的反射镜面形误差RMS值为0.0200λ,即12.7 nm(λ=632.8 nm),180°状态的反射镜面形误差RMS值为0.0239λ,即15.1 nm,均满足使用要求。
提取检测数据,两状态数据作差(T2-T1),得到了两种状态检测数据的变化量,如图9(a)所示,由图可知,面形变化量RMS值为0.0205λ,即13.0 nm。与分析结果相比,二者在数值上差别较小,检测结果比分析结果小了0.3 nm(2.4%),但形状差别略大,究其原因,主要有以下几个方面:
(1)由于加工、装配等原因,实际反射镜组件与有限元模型在材料特性、尺寸精度等方面存在一定的差别,有限元模型无法严格模拟实物的真实状态,从而引入计算误差;
(2)实验室中随机气流扰动会对检测结果造成一定影响;
(3)数据处理时,翻转前后的标记点未能严格对准,从而引入对准误差。
提取检测数据,计算两种状态检测数据的平均值,得到了反射镜的地面零重力面形,如图9(b)所示。由图可知,面形误差RMS值为0.019 4λ,即12.3 nm,与0度状态的检测结果相比,面形误差RMS值在数值上减小了0.4 nm(3.1%),也就是说,在加工残差和重力释放共同作用下,反射镜面形误差仍能满足设计要求。

图7 0°状态反射镜面形检测 Fig.7 Mirror surface figure test under zero degree condition
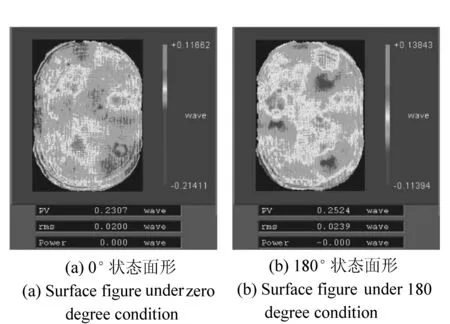
图8 0°状态和180°状态的反射镜面形误差检测结果 Fig.8 Test results of mirror surface figure under zero degree and 180 degrees conditions

图9 面形变化量与零重力面形计算结果 Fig.9 Calculation results for variation of surface figure and zero-gravity surface figure
4 数据可信度分析
提取反射镜零重力面形的目的是为了预示反射镜在空间零重力环境下的面形精度,有必要对数据的可信度进行分析,以确定地面零重力面形能够在多大程度上反应空间零重力面形。
重力和热是影响反射镜面形的重要因素,反射镜所处环境不同,所承受的载荷也不同。表2给出了反射镜在地面和空间环境下所承受载荷的对比。由表可知,地面零重力面形和空间零重力面形存在如下关系:
(10)
式中,S表示空间零重力面形误差,ΔG表示重力释放产生的面形误差高度数据变化量,ΔE表示热载荷改变产生的面形误差高度数据变化量,由于ΔG=-G1,因此式(10)可以表示成如下形式:
(11)
也就是说,空间零重力面形等于地面零重力面形与热载荷改变产生的面形误差之和。空间光学遥感器在地面装调时,反射镜承受的热载荷为环境温度,一般为(20±2) ℃;在轨运行时,反射镜承受的热载荷为主动热控装置产生的热量[12]。SiC具有线胀系数小、热导率高等优良的热特性[13-17],有利于开展主动热控,地面热试验表明:在真空环境下,主动热控措施能够很好地将镜体温度控制在正常工作所需的温度范围以内。根据以上分析,可以确定两种环境下反射镜承受的热载荷基本一致,热载荷变化产生的面形变化量ΔE基本为零,采用方位反向技术获取的地面零重力面形能够真实反应空间零重力环境下的面形精度。
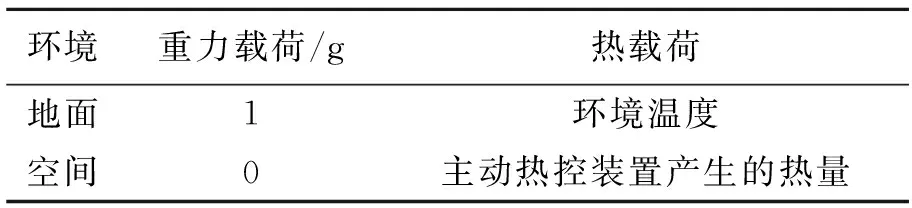
表2 反射镜在地面和空间环境下所承受载荷的对比
5 结 论
重力是影响反射镜面形的重要因素。在实验室进行反射镜的加工与检测时,重力引起的面形误差不能通过物理手段消除。光学遥感器入轨后,反射镜面形精度会由于重力释放而发生改变。为了预估反射镜在空间零重力环境下的面形精度,在地面环境下开展了反射镜零重力面形的提取试验。试验采用了方位反向技术,对相反方位的反射镜面形误差进行检测,从检测数据中获取了反射镜的地面零重力面形。结果表明:反射镜的地面零重力面形误差RMS值约为12.3 nm,满足光学系统提出的优于1/40λ(15.82 nm)的使用要求。数据可信度分析结果表明:试验数据真实可信,可以用来评估反射镜在空间零重力环境下的面形精度。试验结果对反射镜光学加工与装调有重要的指导意义。
[1]KORHONEN T,KEINANEN P,PASANEN M,etal.. Polishing and testing of the 3.5 m SiC M1 mirror of the Herschel space observatory of ESA[J].SPIE,2008,7102:710218_1-710218_7.
[2]KANEDA H,NAKAGAWA T,ENYA K,etal.. Optical testing activities for the SPICA telescope[J].SPIE,2010,7731:77310V_1-77310V_7.
[3]李宗轩,金光,张雷,等.3.5 m口径空间望远镜单块式主镜技术展望[J].中国光学,2014,7(4):532-541.
LI Z X,JIN G,ZHANG L,etal.. Overview and outlook of monolithic primary mirror of spaceborne telescope with 3.5 m aperture[J].ChineseOptics,2014,7(4):532-541.(in Chinese)
[4]石磊,许永森,刘福贺.光电系统中铍反射镜的发展与应用[J].中国光学,2014,7(5):749-758.
SHI L,XU Y S,LIU F H. Development and application of beryllium mirrors in optical systems[J].ChineseOptics,2014,7(5):749-758.(in Chinese)
[5]齐光,王书新,李景林.空间遥感器高体份SiC/Al复合材料反射镜组件设计[J].中国光学,2015,8(1):99-106.
QI G,WANG SH X,LI J L. Design of high volume fraction SiC/Al composite mirror in spape remote sensor[J].ChineseOptics,2015,8(1):99-106.(in Chinese)
[6]陈洪达,陈永和,史婷婷,等.空间反射镜的轻量化及支撑设计研究[J].红外与激光工程,2014,43(2):535-540.
CHEN H D,CHEN Y H,SHI T T,etal.. Lightweight and mounting design for primary mirror in space camera[J].InfraredandLaserEngineering,2014,43(2):535-540.(in Chinese)
[7]徐宏,关英俊.大口径SiC轻量化反射镜组件的结构设计[J].红外与激光工程,2014,43(S1):83-88.
XU H,GUAN Y J. Structural design of large aperture SiC mirror subassembly[J].InfraredandLaserEngineering,2014,43(S1):83-88.(in Chinese)
[8]BLOEMHOF E E ,LAM J C,FERIA V A,etal.. Extracting the zero-gravity surface figure of a mirror[J].SPIE,2008,7013:70133L_1-70133L_12.
[9]戴斌飞.面形精度评价方法研究[D].苏州:苏州大学,2005.
DAI B F. Study on methods for assessing precision of optical surface[D].Suzhou:Suzhou University,2005.(in Chinese)
[10]SCHWERTZ K,Burge J H.FieldGuidetoOptomechanicalDesignandAnalysis[M]. Bellingham:SPIE Press,2012:83.
[11]陈华.高精度面形检测中环境扰动因素分析[D].长春:中科院长春光学精密机械与物理研究所,2011.
CHEN H. Analysis of environmental disturbance effects on high precision figure measurement[D].Changchun:Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences,2011.(in Chinese)
[12]于涛,王永成,代霜,等.基于温度水平的空间相机主动热控系统[J].红外与激光工程,2015,44(1):249-253.
YU T,WANG Y CH,DAI SH,etal.. Active thermal control system for space camera based on temperature level[J].InfraredandLaserEngineering,2015,44(1):249-253.(in Chinese)
[13]任建岳,陈长征,何斌,等.SiC和SiC/Al在TMA空间遥感器中的应用[J].光学 精密工程,2008,16(12):2537-2543.
REN J Y,CHEN CH ZH,HE B,etal.. Application of SiC and SiC/Al to TMA optical remote sensor[J].Opt.PrecisionEng.,2008,16(12):2537-2543.(in Chinese)
[14]康健,宣斌,谢京江.表面改性碳化硅基底反射镜加工技术现状[J].中国光学,2013(6):824-833.
KANG J,XUAN B,XIE J J. Manufacture technology status of surface modified silicon carbide mirrors[J].ChineseOptics,2013(6):824-833.(in Chinese)
[15]赵汝成,包建勋.大口径轻质SiC反射镜的研究与应用[J].中国光学,2014,7(4):552-558.
ZHAO R CH,BAO J X. Investigation and application of large scale lightweight SiC mirror[J].ChineseOptics,2014,7(4):552-558.(in Chinese)
[16]齐光,许艳军,刘炳强.空间相机反射镜SiC/Al支撑板轻量化结构优化设计[J].红外与激光工程,2014,43(7):2214-2218.
QI G,XU Y J,LIU B Q. Lightweight structure design for SiC/Al supporting plate of space mirror[J].InfraredandLaserEngineering,2014,43(7):2214-2218.(in Chinese)
[17]伞兵,李景林,孙斌.空间相机大口径反射镜轻量化技术及应用[J].红外与激光工程,2015,44(10):3043-3048.
SAN B,LI J L,SUN B. Light-weight technology and its application of large-aperture mirror in space camera[J].InfraredandLaserEngineering,2015,44(10):3043-3048.(in Chinese)
Extracting zero-gravity surface figure of mirror by orientation reversal
YANG Li-wei*, LI Zhi-lai, XUE Dong-lin, DONG De-yi, FAN Yan-chao, ZENG Xue-feng
(Changchun Institute of Optics,Fine Mechanics and Physics,ChineseAcademyofSciences,Changchun130033,China)*Correspondingauthor,E-mail:13604415684@126.com
In order to estimate the SiC mirror surface figure under the space zero-gravity environment, extracting zero-gravity surface figure of SiC mirror by orientation reversal under ground environment was studied. Firstly, the principle of extracting zero-gravity surface figure by orientation reversal is introduced. Secondly, the effect of orientation reversal on mirror surface figure is analysed by finite element analysis software. Then, according to the flow chart, mirror surface figure of 0° and 180° conditions are tested successively, and the zero-gravity surface figure is obtained by average two measurements. The data indicate that the RMS value of the ground zero-gravity surface figure of mirror is 12.3 nm, which meets the design requirement. Last, data credibility is analysed and confirmed. The obtained results indicate the mirror surface figure in the zero-gravity environment of space, which has important significance for optical fabrication and alignment of mirror.
orientation reversal;SiC mirror;zero-gravity surface figure;optical test
2016-04-25;
2016-05-29
国家高技术研究发展计划(863计划)资助项目(No.2011AA7026057)
2095-1531(2016)05-0606-07
V447.3; TH703
Adoi:10.3788/CO.20160905.0606

杨利伟(1980—),男,硕士,河南开封人,副研究员,2009年于中国科学院长春光学精密机械与物理研究所获得硕士学位,主要从事空间光学遥感器光机结构设计方面的研究。E-mail:13604415684@126.com
Supported by National High-tech R&D Program of China(No.2011AA7026057)
猜你喜欢
新能源科技(2022年9期)2022-11-20 19:28:56
航天返回与遥感(2022年3期)2022-07-07 05:13:36
幼儿园(2021年12期)2021-11-06 05:10:20
电子技术应用(2021年1期)2021-01-22 09:45:06
环境技术(2020年1期)2020-03-06 11:41:02
航天返回与遥感(2018年2期)2018-05-17 09:37:57
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年1期)2016-11-07 09:01:50
光学精密工程(2016年7期)2016-08-23 06:36:49
中国修辞(2016年0期)2016-03-20 05:54:32