
电动清扫车前扫盘机运动可靠性研究及灰色关联分析
2016-10-25 06:11成立平王平花李立斌
电气技术与经济 2016年4期
成立平 王平花 李立斌
(湖南机电职业技术学院)
电动清扫车前扫盘机运动可靠性研究及灰色关联分析
成立平 王平花 李立斌
(湖南机电职业技术学院)
本文通过ADAMS建立电动清扫车前扫盘机虚拟样机模型,运用参数化建模的方法实现尺寸误差、间隙误差和驱动误差对运动可靠性的研究,然后运用灰色关联理论研究尺寸误差、间隙误差以及驱动误差对模型运动可靠度的影响度。结果表明:尺寸误差、间隙误差以及驱动误差均与电动清扫车前扫盘机的运动可靠度呈负相关关系;尺寸误差对电动清扫车前扫盘机的运动可靠度影响最大,驱动误差的影响最小。
电动清扫车;可靠度;灰色关联理论
0 引言
由于机械零件在制造和装配以及运行过程中会出现尺寸误差、间隙误差以及磨损,这些都会对机械的正常运行造成影响,因而对机构的运动可靠性研究是必要的和有意义的[1-3]。电动清扫车前扫盘机作为一种清洁机器,其在日常生活中有广泛的运用,为人们节省了时间和体力,因此,有许多专家学者对该机构做了一些研究。叶勤等人将虚拟装配技术应用于电动清扫车的设计研发。简洁等人设计出了一款应用于电动清扫车上的纯扫式滑扫作业装置,并通过建立模型,对其主要参数进行了计算和分析。江新芳对JDB2000A电动清扫车的关键部件结构进行了应力分析和优化研究。
从以上研究可知,专家学者没有对电动清扫车前扫盘机运动可靠性进行研究,为此本文运用软件ADAMS建立电动清扫车前扫盘机虚拟样机模型,运用参数化建模的方法实现尺寸误差和间隙误差对运动可靠性的研究,最后运用灰色关联理论研究尺寸误差、间隙误差以及驱动误差对模型运动可靠度的影响度,为电动清扫车前扫盘机的结构设计和批量生产提供参考和技术支持。
1 电动清扫车前扫盘机运动可靠性模型
1.1 电动清扫车前扫盘机工作原理
电动清扫车前扫盘机的结构如图1所示。前扫盘机构水平运动由齿轮齿条机构实现,齿轮6由旋转电机4带动,与安装在底板1上的齿条7啮合,并带动整个工作台12沿导轨2实现水平方向运动;竖直方向运动由旋转电机3带动螺纹杆13运动,螺纹杆13与滑块8通过螺纹连接,则当螺纹杆13与滑块8之间的螺纹转动时,带动滑块8在工作台滑槽内上下运动,因此该机构能实现前扫盘在水平方向和竖直方向灵活运动控制。

图1 前扫盘机构示意图
1.2 电动清扫车前扫盘机运动可靠性建模
运用ADAMS建立电动清扫车前扫盘机运动可靠性模型,建模包括建立几何模型、施加约束机构以及添加驱动。由于模型比较复杂,需要根据实际尺寸加以简化,简化过程中要遵循以下原则:
1) ADAMS建模时,可以删掉对机构运动不起作用的零部件;
2)选用运动副时,要正确使用运动副表示相连接零部件之间的运动关系;
3)多个零部件固结时,可以用一个零件代替表示以减少运动副数量。
最终建立的电动清扫车前扫盘机虚拟样机模型如图2所示。

图2 电动清扫车前扫盘机虚拟样机模型
1.3 可靠度计算
以计算位移可靠度为例,理想位移与实际位移之间的误差如式(1)所示

因而,经过i次仿真,误差的均值μ和方差σ2如式(2)和式(3)所示

本文中考虑的三种误差均服从正态分布,则可靠度计算公式为


2 结果与讨论
2.1 尺寸误差对可靠度影响
图3为电动清扫车前扫盘机运动可靠度随尺寸误差变化曲线图。从图中可以看出,当尺寸误差在0~0.3mm之间变化时,该机构的运动可靠度逐渐降低,这表明机构的运动可靠度与尺寸误差呈负相关关系。这是由于尺寸误差的加大,导致机构之间的连接出现松动,使机构不按照预定的轨迹和速度运行。并且,从图中还可以看到,在相同尺寸误差下,加速度可靠度最小。这是由于尺寸误差导致的误差积累效应造成的,因而放大了尺寸误差对加速度可靠度的影响。

图3 运动可靠度随尺寸误差变化
2.2 间隙误差对可靠度影响
图4为电动清扫车前扫盘机运动可靠度随间隙误差变化曲线图。从图中可以看出,当间隙误差在0~0.03mm之间变化时,该机构的运动可靠度逐渐降低,这表明机构的运动可靠度与间隙误差呈负相关关系。这是由于间隙误差的加大,导致机构运动副之间的摩擦加剧,因而机构零部件的受力不稳定,则运动可靠度出现相应的降低。
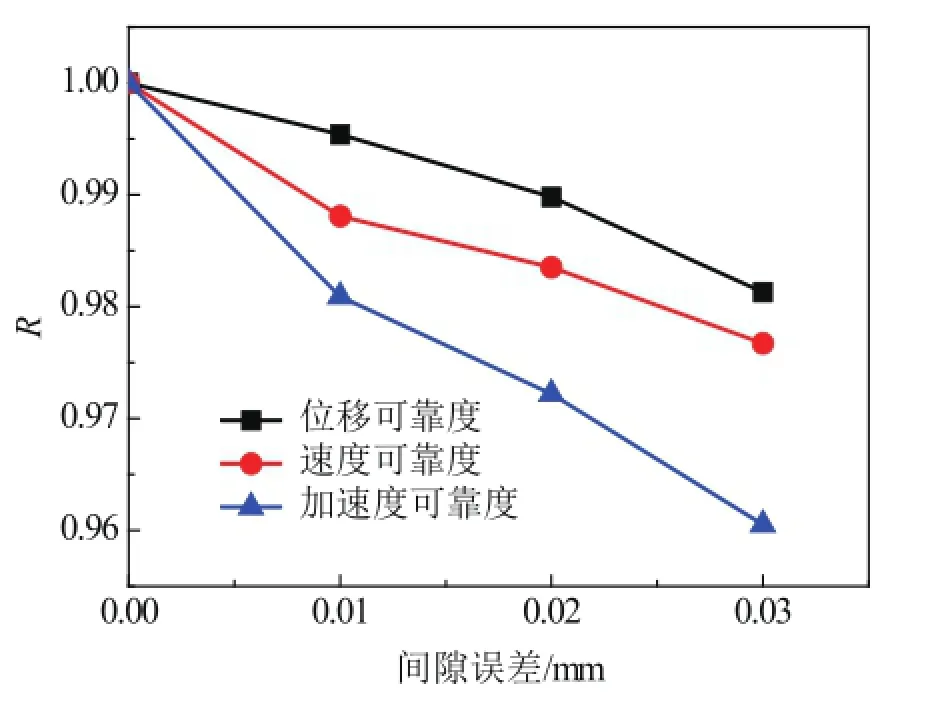
图4 运动可靠度随间隙误差变化
2.3 驱动误差对可靠度影响
图5为电动清扫车前扫盘机运动可靠度随驱动误差变化曲线图。从图中可以看出,当驱动误差在0~0.3°之间变化时,该机构的运动可靠度逐渐降低,这表明机构的运动可靠度与驱动误差呈负相关关系。驱动误差是机构运动可靠度直接降低的原因,驱动误差的加大,直接导致了机构的位移、速度和加速度的变化。比较的“母序列”,记其特征向量矩阵为式中,y(k)为参考序列;[y(1) y(2) … y(n)] 参考序列中的数据。

设系统影响因素向量有m个,在这些因素影响下被研究的工况有n种,记其相应的特征向量矩阵为式中,x(k)为对应于参考序列y(k)的比较序列。

Step2:原始数列无量纲化。为减小分析识别的错误概率,在计算前,需要对各具有不同量纲的特征参数进行无量纲化,本文采用数据区间化无量纲化,方法如下式中,k=1,2,3,…,n。

Step3:计算灰色关联系数

Step4:计算灰色关联度。灰色关联度的计算公式为


图5 运动可靠度随驱动误差变化
3 灰色关联分析
3.1 灰色关联理论
灰色关联理论是一种将定量和定性相结合的方法,使原本复杂的问题变得更加清晰简单,而且计算方便、结论客观,此方法已经成功用于很多方面。本文用此方法研究尺寸误差和间隙误差以及驱动误差对电动清扫车前扫盘机运动可靠度的影响程度,具体步骤如下:
Step1:确定参考序列和比较序列。参考序列是进行
式中,r为影响因素与目标参数之间灰色关联度。
Step5:评价分析。根据灰色关联度的大小,对各影响因素进行排序。
3.2 实例应用
为研究影响电动清扫车前扫盘机运动可靠度的因素,分别对不同尺寸误差、间隙误差和驱动误差等工况进行数值模拟研究,得到位移可靠度、速度可靠度和加速度可靠度的结果,如下表所示。

表 不同工况下运动可靠度结果
各工况下位移可靠度、速度可靠度和加速度可靠度分别为参考序列y1(k)、y2(k)和y3(k),尺寸误差、间隙误差和驱动误差分别为比较序列x1(k)、x2(k)和x3(k),以此研究这三个因素对电动清扫车前扫盘机运动可靠度的影响程度。无量纲化后得到如下序列

不同工况下电动清扫车前扫盘机运动可靠度的灰色关联系数矩阵如下所示

将以上计算结果代入式(11),可得尺寸误差、间隙误差和驱动误差分别与位移可靠度、速度可靠度和加速度可靠度之间的关联度,如图6所示。从图6中可以看出,尺寸误差对位移可靠度、速度可靠度和加速度可靠度的影响最大,驱动误差的影响最小。

图6 不同因素对运动可靠度的影响度
4 结束语
本文通过ADAMS建立电动清扫车前扫盘机虚拟样机模型,运用参数化建模的方法实现尺寸误差、间隙误差和驱动误差对运动可靠性的研究,然后运用灰色关联理论研究尺寸误差、间隙误差以及驱动误差对模型运动可靠度的影响度得到如下结论:
1)尺寸误差、间隙误差以及驱动误差均与电动清扫车前扫盘机的运动可靠度呈负相关关系;
2)尺寸误差对电动清扫车前扫盘机的运动可靠度影响最大,驱动误差的影响最小。
[1]纪玉杰, 孙志礼, 李良巧. 曲柄滑块机构运动可靠性的仿真[J]. 兵工学报, 2006, 27(1): 116-120.
[2] 王亚平, 聂宏, 王永娟. 步枪三发点射机构的运动可靠性研究[J]. 南京理工大学学报: 自然科学版, 2008, 32(6):686-689.
[3]程刚, 张相炎, 董志强, 董敬芳. 高速供弹机构运动可靠性仿真研究[J]. 兵工学报, 2011, 32(7): 801-804.
[4]叶勤,巩正阳,丁青海, 徐大伟. 基于虚拟装配技术的小型电动清扫车设计[J].专用汽车,2007(7):31-32.
2016-07-12)
猜你喜欢
小资CHIC!ELEGANCE(2022年2期)2022-01-11
航空发动机(2020年3期)2020-07-24
数学物理学报(2020年2期)2020-06-02
小学生学习指导(低年级)(2020年3期)2020-06-02
汽车实用技术(2020年3期)2020-03-07
探索科学(学术版)(2019年5期)2019-07-13
阳光(2017年7期)2017-07-18
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25
中国交通信息化(2016年4期)2016-06-06
