
基于人工智能路径规划系统的智能小车的设计与实现
2016-10-24 05:03海南软件职业技术学院蔡莉莎曾维鹏
电子世界 2016年18期
海南软件职业技术学院 蔡莉莎 曾维鹏
基于人工智能路径规划系统的智能小车的设计与实现
海南软件职业技术学院蔡莉莎曾维鹏
本文提出基于SAT人工智能路径规划系统智能小车的软硬件设计方案。使用Zigbee以及WiFi无线透传技术实现小车与安卓设备的数据交换。硬件电路方面,整个系统由车体运动控制电路和传感器及通信系统电路构成,电路之间使用串口通信方式通信。软件设计方面,传感器及通信系统模块使用API接口函数封装传感器模块,使得车体运动控制模块方面的调取相关数据。实验表明基于SAT的路径规划算法实现小车短时间无碰撞行驶至目标地点。
SAT路径规划;WiFi;API;智能小车;安卓设备
1 引言
随着安卓智能手机及平板的普及,手机作为无线控制终端使用也备受青睐,例如手机作为无线控制终端的智能家居控制系统,手机远程遥控智能小车,小型遥控飞机,故障排查机器人等。手机无线通信的方式包括4G网络、蓝牙、红外、WiFi等。WiFi较蓝牙、红外具有覆盖范围广,数据传输速度快等优点,因此WiFi技术使用在无线控制终端越来越广泛。路径规划,目标点、故障点识别是车轮移动机器人研究热点难点。使用AI智能规划算法解决路径规划问题,将规划问题转变为有规整的状态空间的宽度优先搜索算法,缩短路径规划时间,提高规划效率[1]。本设计以安卓手机或平板作为控制终端,通过WiFi无线通信技术控制智能小车,采用AI路径规划算法实现短时间无碰行驶从初始目标至目标地点[2]。
2 总体设计
本系统采用人工智能路径规划系统为核心的智能小车,系统实现的功能为:智能救援小车在地图上执行救援任务,小车通过读取RFID卡内容在LCD液晶显示屏上显示启动、事故地点、故障处理坐标,手机发送启动指令后,智能救援小车开始救援工作。在救援过程中通过路径规划算法规划启动坐标到事故坐标及故障处理坐标的最佳路径。

图1 总体框图
智能小车控制系统由两部分构成,一部分是车体运动控制电路,一部分是传感器及通信系统的控制电路,两部分电路通过单片机串口通信实现数据传输。车体运动控制电路包括单片机模块及循迹模块构成。传感器及通信系统的控制电路由单片机控制模块,超声波测距模块、三轴电子罗盘传感器模块、RFID识别模块、WiFi通信模块组成,总体框图如图1所示[3]。
2.1传感器及通信系统控制电路
控制电路包括主控STC12C5A60S2芯片、超声波发射和接收电路、电子罗盘电路、方向指示灯电路(恒流源控制方式)、WiFi模块、RFID模块接口、复位按键、蜂鸣器、串口接口、下载接口等。传感器及通信系统控制电路如图2所示。
2.1.1主控芯片电路
主控芯片采用STC12C5A60S2单片机,是STC生产的单时钟/机器周期(1T)的单片机,是高速、低功耗超强抗干扰的新一代8051单片机,比传统8051单片机,速度快8至12倍[4]。电路设计有两组串行接口,SPI接口,IIC接口,PWM输出接口,并行接口和普通输入输出接口接口。采用11.0592MHZ外部时钟,丰富的内部资源能满足众多功能需求。
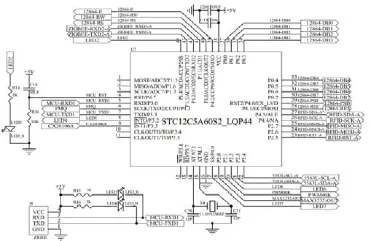
图2 传感器及通信系统控制电路
2.1.2电源稳压电路
电源稳压电路采用贴片LM2576-5V开关稳压器芯片,最大输入3V/3A,最大输出5V/3A,可为任务板提供稳定的电源。
2.1.3超声波电路
由单片机产生40KHZ方波经过232升压驱动超声波发射器发出超声波,经障碍物反射给超声波接收器放大、解码后输出接收信号,单片机计算声波传送时间,由此计算监测点到被测物的距离,本超声波电路实测精度为1CM。
2.1.4方向灯控制电路
方向灯控制电路采用恒流驱动电路,电压的波动不会影响流过LED灯的电流,通过单片机控制引脚输出高低电平可控制LED亮灭。
2.1.5电子罗盘电路
电子罗盘电路采用的是霍尼韦尔HMC5883L带有数字接口的弱磁传感器芯片,罗盘精度为1°~2°,主要检测罗盘和磁场。HMC5883L为3.3V芯片,通过电平转换电路与5V单片机通讯。
2.1.6 RFID射频识别电路
RFID射频识别电路使用MF522-AN模块,模块采用电压为3.3V,通过SPI接口直接与单片机相连接通信,可以保证模块稳定可靠的工作、读卡距离远。射频识别电路如图2所示。
2.1.7WiFi通信电路
WiFi通信电路采用HLK-RM04嵌入式WIFI转串口无线透明传输模块,通过Zigbee无线模块组网,实现手机与单片机之间数据透传。
2.2车体运动控制电路
车体运动控制电路通过8路循迹传感器模块检测地图中的黑白线,根据检测的结果控制电机驱动电路驱动4个电机,实现小车运动状态的改变。值得一提的是在实验过程中由于采用的是8路循迹传感器所以检测黑白线的精度较高,因此在程序中不需要PWM调试。
车体运动控制电路还与传感器及通信系统控制电路之间进行串口通信,根据安桌设备所发出的启动指令实现车体的启动,根据超声波测距传感器、罗盘传感器检测的数据调整车体运动状态。
3 系统软件设计
系统软件设计由车体运动控制模块,传感器及通信系统控制模块,规划模块三部分构成。
3.1传感器及通信系统控制模块
随着嵌入式系统的不断完善和发展,模块化,标准化。API函数实现成为众多嵌入式项目开发首选,传感器及通信系统控制模块采用的是API函数的设计方法。将各个传感器函数封装成不同的API接口函数,当车体运动控制模块需要传感器检测的数据来协助调整车体运动时,通过输入不同的标准化数据指令,实现对射频、超声波、指南针以及手机发送接收透传等数据的调取。例如,小车控制模块想了解小车运动的事故地点坐标,则可以通过指令RFID,读取射频卡,RFID指令如表1所示:
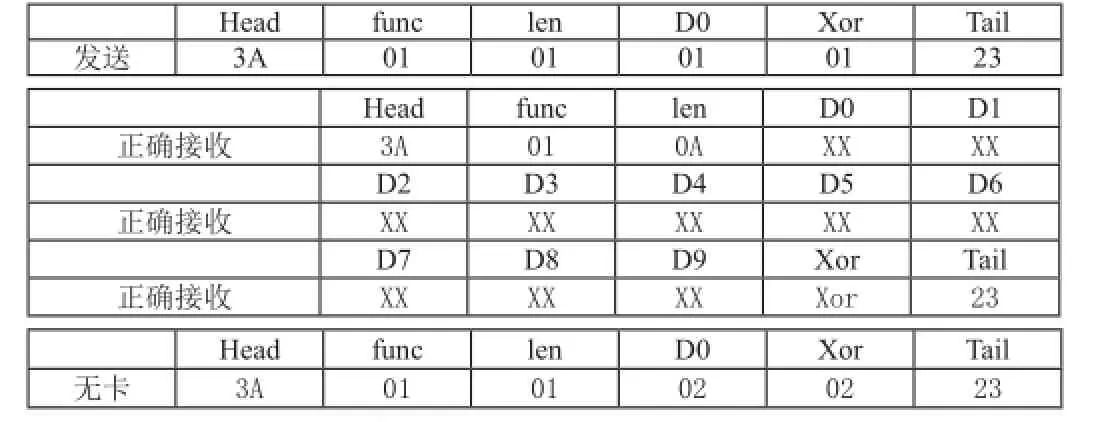
表1 RFID指令
当车体运动控制模块向传感器及通信系统控制模块发送6组16进制的数据3A,01,01,01,01,23时,传感器及通信系统控制模块调用读取射频卡的API函数,将所读取的射频卡信息返回车体控制模块,当车体控制模块正确接收数据时,其中D0-D9所显示的16进制的数据则表示射频卡的内容。如果读卡器中没有射频卡,则返回无卡数据3A,01,01,02,02,23。
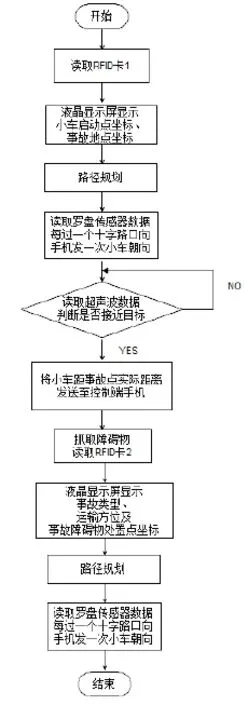
图3 车体运动控制模块流程图
3.2规划模块
路径规划算法:
本系统是基于SAT路径规划算法设计的智能小车。SAT路径规划算法的基本思想是:是将规划问题转换成SAT可满足性问题,将规划任务构造长度N=1的编码成合取范式(Conjunctive Normal Form,CNF)公式,调用SAT求解器对该规划问题进行求解,从SAT求解器返回的赋值中提取规划解,如果SAT求解器返回值为SAT,则该规划解是规划任务的一个解。如果SAT求解器返回值为USAT,则表示编码长度N不足,需要进一步构造N+1的合取范式[5]。
SAT规划模块包括编译器、简化器,求解器、解码器四部分构成[6],如图4所示。首先将路径的规划问题转换成SAT问题,把小车的初始坐标、小车事故地点坐标及规划长度产生合取范式的形式即CNF。将该CNF公式上传到PC输入MiniSAT求解器中,通过求解器求解判断该公式是否可满足,规划解是否存在。如果求解器求解的结果为“USAT”不可满足,则需要通过增加规划长度产生新的编码执行以上过程。如果求解器求解的结果为“SAT”可满足,则将求解器输出的满足地图坐标,车体运动控制模块根据该坐标控制小车行驶的路径[7]。
3.3车体运动控制模块
车体运动控制模块的主要功能是发送数据指令读取传感器及通信系统控制模块的相关传感器信息结合循迹传感器控制车体的运动状态。车体运动控制模块流程图如图3所示。
4 系统调试
当软硬件设计完毕,进入系统调试阶段。首先将安桌设备与WiFi连上安装并打开安桌调试助手,设置IP及端口。其次小车读取RFID卡1的信息,使用手机发送启动指令。小车接收到启动指令后启动,每经过一个十字路口都发回小车的朝向。当小车离事故坐标<15cm时,停车检测障碍物,通过离障碍物的距离单双数以及RFID2的内容来判断事故处置点的方位,同时实现抓取障碍物,将障碍物运送到事故处置点。小车的调试过程如图4所示。
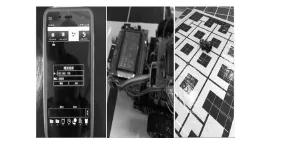
图4 调试过程
5 总结
本文着重介绍了智能规划中的SAT技术,基于SAT规划算法设计智能小车,该系统由车体控制模块、规划模块、传感器及通信系统模块三部分构成。该小车在实验给出的模拟地图上根据RFID卡的信息自主进行路径规划,找到事故地点及故障处置点。经过实验表明该系统在行走的过程中几乎不会出现走“弯路”的现象,基于SAT算法的有规整的状态空间的宽度优先搜索算法,大大缩短了路径规划时间。
[1]周毅.基于智能算法的机器人路径方法研究[D].北京:北京工业大学,2009:1-15.
[2]王烨.基于Android系统的智能导航小车设计[D].天津:天津大学,2013:7-25.
[3]朱丹峰,葛主冉,林晓雷.基于Android平台的无线遥控智能小车[J].电子器件,2013,36(6):408-412.
[4]黄仁兵,崔文婷,郭凤,刘洲,赵玉乐.电梯模型智能控制的研究[J].自动化与仪器仪表,2014(7):27-29.
[5]张雷.基于启发式搜索的最优规划算法研究[D].南京:南京大学,2014:7-25.
[6]刘吉颖,方思行.AI规划的回顾与展望[J].中山大学学报论丛,2000,20(5):78-80.
[7]凌应标.基于SAT的规划理论与算法研究[D].广东:中山大学,2005:1-9.
Design and Implementation of Intellingent Car Based on AI Path Planning System
CAI Li-sha ZENG Wei-peng
(Hainan Software Profession Institute Qionghai Hainan 571400China)
This paper presents the design of hardware and software based on artificial intelligence SAT path planning system of the smart car.Using Zigbee and WiFi wireless technology to achieve exchange data with car and Android devices.In terms of hardware circuit,The system consists of a vehicle body motion control circuits and sensors and communication systems circuit,Using the serial communication. Software design.Using the API interface functions encapsulate the sensor module to facilitate the transfer of data. Experiments show that based on SAT path planning algorithm to achieve car short-term,collision-free travel to the destination.
SAT Path Planning;WiFi;API;Intelligent Car;Android
2015海南省自然科学基金项目(20156249);2016海南省自然科学基金项目(20166229)。
蔡莉莎(1984—),海南海口人,硕士,副教授,研究方向:人工智能、嵌入式技术。
曾维鹏【通讯作者】(1982—),海南海口人,硕士,副教授,研究方向:人工智能、嵌入式技术。
猜你喜欢
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
汽车维护与修理(2019年3期)2019-08-08
文苑(2018年22期)2018-11-19
汽车维护与修理(2018年5期)2018-09-29
汽车维护与修理(2018年23期)2018-07-03
电子制作(2018年8期)2018-06-26
汽车维护与修理(2017年5期)2017-11-17
专用汽车(2016年12期)2016-02-11
山东工业技术(2014年20期)2014-10-21
