
基于TC1782的电机转子位置冗余检测设计与研究
2016-10-22 03:38:02王春杰袁宋伟王文白李洲
电子设计工程 2016年17期
王春杰,袁宋伟,王文白,李洲
(1.天津理工大学天津市复杂控制理论与应用重点实验室,天津300384;2.天津大学电气与自动化工程学院,天津300384)
基于TC1782的电机转子位置冗余检测设计与研究
王春杰1,袁宋伟1,王文白2,李洲1
(1.天津理工大学天津市复杂控制理论与应用重点实验室,天津300384;2.天津大学电气与自动化工程学院,天津300384)
为满足汽车安全功能规范ISO26262对控制系统安全性设计要求,介绍了一种适用于永磁同步电机(PMSM)的高性能转子位置冗余设计方法。该方法在基于TC1782和旋转变压器及其数字解码芯片AD2S1200的基础上,冗余设计转子位置解码算法,以确保旋转变压器解码芯片发生故障时,系统仍能正常运行。实验结果验证了该算法的可行性。
永磁同步电机;AD2S1200;旋转变压器;TC1782;冗余检测
在电机控制系统中,转子位置是十分重要的反馈参数,尤其是在永磁同步电动机(PMSM)控制系统中,转子位置及其转速信息直接关系到电机启动和控制精度。目前主要采用光电传感器、霍尔传感器和旋转变压器测量转子位置和转速。由于旋转变压器相对光电传感器和霍尔传感器,具有精度高,适用范围广,抗冲击,抗油污等优势[1-2],因此旋转变压器在电动汽车中应用更为广泛。通常用专用旋转变压器解码芯片将旋转变压器输出的正余弦模拟信号解码成转子位置和转速的数字信号。虽然通过这种途径可以得到精确的转子信息,但不能满足汽车安全功能规范ISO26262对控制系统冗余性设计的严格要求,因此本文提出了一种Infineon DSP TC1782中编写解码算法的冗余方案。该软件算法解码的转子信息可以确保旋转变压器解码芯片出现故障时系统仍能正常运行,在不增加显性成本的基础上,提高了系统的可靠性和安全性。
目前,基于旋转变压器的软件解码算法主要有反三角函数法、锁相环角度跟踪法和基于励磁信号及采样保持的角度估算法。其中,反三角函数法是将处理后的旋转变压器正、余弦信号相除后求正切得到角度信息,然后通过角度值进行微分运算得到转子转速,这种方法占用CPU资源多且抗干扰能力差[3]。锁相环角度跟踪法虽然分辨精度高,抗干扰能力强,但在电机快速加速或减速时测量误差很大[4]。基于励磁信号及采样保持的角度估算法对旋转变压器励磁信号和输出信号进行比较处理后,采样保持电路输出与转子位置成正比的电压信号,即角度估算值。这种方法容易实现,但是精度差,而且无法直接得到转子转速[5]。基于以上软件解码算法的缺陷,本文提出一种基于软件角度观测器的解码算法,该算法采用闭环控制方式,在DSP的强大计算能力支持下,能够快速、精确计算出转子位置和速度,并且抗干扰能力强,可靠性高。
1 旋转变压器工作原理
文中选用日本TAMAGAWA的TS2225N13E102正余弦无刷式旋转变压器,其工作原理如图1所示。

图1 旋转变压器原理图
R1、R2为励磁绕组,S1-S3、S2-S4是两套相互垂直的定子输出绕组。工作时,在R1,R2两端输入高频交流电压励磁信号,在旋转变压器气隙产生脉振磁场。当转子随电机旋转时,脉振磁场也随之旋转,从而在定子绕组感应出与转子位置有关的脉振电势,大小为励磁电压与转子旋转角度的正余弦值得乘积,其输入输出关系如式(1)、(2)和(3),波形图见图2。
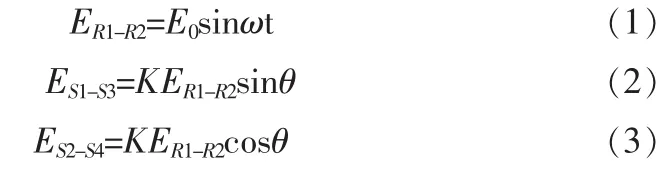
式中:E0为励磁信号幅值;K为旋转变压器变比;ω为励磁信号角频率;θ为转子旋转角。
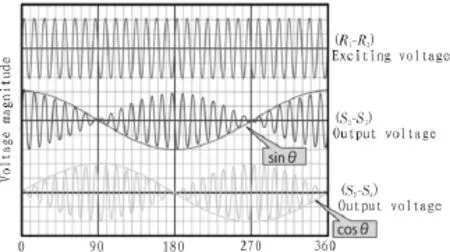
图2 旋转变压器输入输出波形
由图2可以看出,随着转子旋转角θ的变化,1)旋转变压器的正弦绕组(S1-S3)和余弦绕组(S2-S4)的输出是调幅波,该调幅波以同频同相的励磁电压作为载波信号,以正弦波和余弦波作为调制信号。2)正弦绕组输出的波形和余弦绕组输出的波形相位同相或反相,两者包络线相位相差90°。
2AD2S1200工作原理及接口电路设计
AD2S1200集成片上可编程正弦波振荡器,5V单电源供电,同时具有串行通讯接口和并行输出接口,励磁频率为10kHz、12kHz、15kHz、20kHz可编程。该芯片所需外围电路简单,适用于各种无刷旋转变压器输出信号的数模转换,抗干扰能力强,而且功能丰富,性价比较高。
2.1AD2S1200工作原理

式中:φ为位置积分器送入乘法器的数字角度。式(4)减去式(5)得:

式中:θ-φ为角度误差,此信号被送到相敏检测器,与励磁信号E0sinωt进行比较,得到Ksin(θ-φ)。由乘法器、相敏检测器、数字滤波器、速度积分器和位置积分器组成的Ⅱ型闭环反馈系统,使sin(θ-φ)逐渐趋于零。当sin(θ-φ)趋于零时,即θ-φ=0时,则由位置积分器的计数值φ所代表的角度值即为转子的位置θ。
2.2外围电路设计
文中采用的旋转变压器所需的励磁电压范围有效值为3~8.4V,初、次级电压比为0.286,而AD2S1200输出的励磁信号峰峰值为8.2V,接收的正余弦输入信号峰峰值为(3.6± 10%)V,本文设计励磁信号调理电路如图3所示[6]。励磁电压信号从AD2S1200的和输出,经过差分放大器后电压峰峰值U1p-p为:

式中1.8为放大倍数。

图3 励磁信号调理电路
由于AD2S1200对输入信号Sin(Cos)与SinLO(CosLO)有压差要求,且输入的差分信号不能低于零电位,因此本文设计使用REFOUT来偏置输入差分信号。同时为了改善系统的噪声性能,本文对输入模拟信号进行RC滤波调理。
2.3AD2S1200与TC1782通讯电路设计
文中所采用的主控芯片是数字控制专用的高速32位DSP,采用四级流水线哈佛结构,集成中断控制器、外设控制处理器、DAM控制器、GPTA模块、多种总线及32路模拟输入信号等功能,工作频率高达180 MHz[7-8]。设计AD2S1200与TC1782采用串行方式通,使用高速光耦TLP2630完成AD2S1200和TC1782之间信号电平转换及信号隔离,电路结构框图如图4。
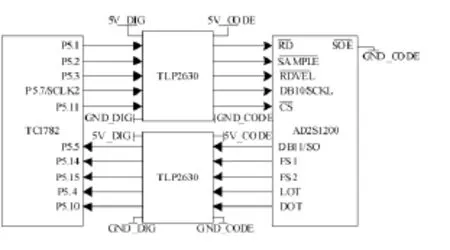
图4 通讯电路结构框图
3 实验结果及分析
文中设计所采用的PMSM电动机额定转速为3 000 r/min,额定功率为18 kW,极对数p=3。AS2S1200与TC1782的串口通讯波特率设置为2.5 MHz,经过调理后的励磁信号峰峰值为14.7V,频率为10kHz,与计算吻合,满足旋转变压器对励磁信号需求。两组输入AD2S12000的Sin/SinLO信号和Cos/
Design and research of position redundancy detection for motor rotor based on TC1782
WANG Chun-jie1,YUAN Song-wei1,WANG Wen-bai2,LI Zhou1
(1.Tianjin Key Laboratory of Control Theory&Applications in Complicated Systems,Tianjin University of Technology,Tianjin 300384,China;2.College of Electrical Engineering and Automation,Tianjin University,Tianjin 300384,China)
A high-performance method of rotor position redundancy design for permanent magnet synchronous motor(PMSM)is introduced in this paper,in order to meet the safety design requirements of automobile security functionality specification ISO26262 for the control system.Based on TC1782,resolver and its digital decoder chip AD2S1200,a rotor position decoding algorithm is designed redundantly.The algorithm can ensure the system work normally when resolver decoding chip is failure.The feasibility of the algorithm is verified by the experimental results.
PMSM;AD2S1200;resolver;TC1782;redundancy detection
TN602
A
1674-6236(2016)17-0191-03
2015-09-06稿件编号:201509048
王春杰(1973—),男,河南新乡人,博士,副教授。研究方向:永磁同步电机驱动技术、高压电机转子变频调速装置性能研究。
猜你喜欢
中国石油石化(2022年12期)2022-07-16 08:28:28
河北电力技术(2021年2期)2021-07-29 09:16:30
中国外汇(2019年19期)2019-11-26 00:57:32
家庭影院技术(2018年11期)2019-01-21 02:20:50
家庭影院技术(2018年11期)2019-01-21 02:20:48
电子制作(2018年1期)2018-04-04 01:48:34
大电机技术(2017年3期)2017-06-05 09:36:02
中学数学杂志(高中版)(2016年6期)2017-03-01 18:53:58
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:40
职业技术(2015年8期)2016-01-05 12:16:46
