
基于Labview的管道长度测量系统
2016-10-21 16:57高棱刘咏梅潘锦强
科技创新与应用 2016年8期
关键词:声卡
高棱 刘咏梅 潘锦强

摘 要:文章基于Labview软件开发环境,其测量原理采用管道内声波的共振原理以及快速傅里叶算法(FFT)。硬件部分包括一台笔记本电脑、一台声音激发装置和一个数据采集装置;软件部分包括数据分析处理、数据通讯、系统配置等模块。试验表明,本系统能实现全自动化测量管道长度,测量时间短,仅需15秒钟就能实现自动化测量,在所测量的实例中,相对误差均在0.7%以下。
关键词:Labview;管道长度;FFT;声卡
引言
在居民生活或者工业的应用中,很多大长度管道一般都弯曲、深埋地下,测量较为困难。传统的测量方法一般是运用手工丈量,劳动强度高,且准确率低。通过查阅文献可知,已有一些研究采用激光测量的方式测量管道长度[1-4],但是其激光设备成本高,且无法实现弯折管道测量;也有相关研究采用声波定位的方式测量[5-6],通过声波在管道传播的距离来实现管件长度的测量,但其无法实现单端测量,且无法适用于弯折管道测量;也有文献采用声波共振原理测量管道长度[7],但其系统采用时域音频信号,测量时间长,需3分钟的测量时间,且因基于STC89C52单片机系统,测量精度也较低,实验误差为1.5%以下。因此,作者开发一款基于Labview的管道长度测量系统,以管道内空气柱的共振原理为理论基础,以笔记本电脑声卡作为数据信号采集装置,采用快速傅里叶(FFT)频域分析法,具有成本低廉、测量时间短、精度高以及抗干扰强的优点,解决了弯曲管道的长度和深埋地下的管道长度的测量等难题。
1 测量原理
当声波为低频波时,也即存在管道直径d与波长?姿比小于0.5时,声波在管道内传播可看成一维平面波。当沿着管道传播的方向的激发声波与反方向传播的反射声波叠加时,在管道内形成了驻波产生共振。其中管道的长度与声音共振的频率相关,通过公式推导可知
2 管道长度自动测量系统设计
此测量系统主要包括两部分,硬件部分以及软件部分。由拾音器模块、声音播放模块和笔记本电脑构成系统的硬件部分,基于Labview的数据处理分析构成软件部分。
2.1 硬件设计
2.1.1 拾音器MSMAS42Z传感器
声音信号的采集是该系统的关键,对于该系统传感器需要满足的条件有:(1)灵敏度高,能够较好的声压信号。(2)对不同频率的响应较一致,即对相同响度的不同频率采集到的响应较一致。
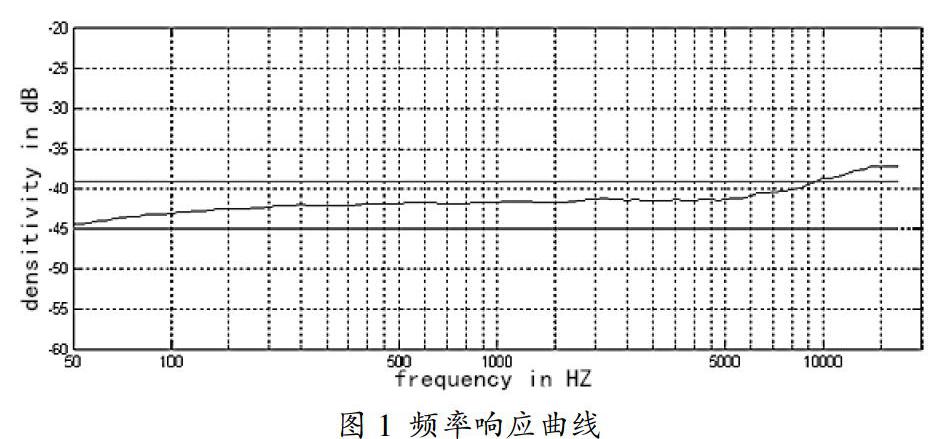
本系统选用MSMAS42Z拾音器传感器,MSMAS42Z是由敏芯微电子技术有限公司生产的微型麦克风传感器,该麦克风传感器性能优越,具有较好的响应曲线,从图1中可看出,从250Hz至450Hz的响应曲线都比较平缓,响应较为一致,失真率较小。满足系统的灵敏度和响应一致性的要求。
2.1.2 声音播放装置
采用音箱型号为MD-95,该型号的音箱使用较为普遍,容易购买,价格低廉。由信号发送装置驱动该音箱,信号发送装置为普通的USB闪存盘,里面装载了特制的音频信号。该音频信号是由Adobe Audition特殊调制的音频信号,是由频率为250Hz到450Hz的间隔为0.5Hz的正弦波信号合成的音频信号。合成该信号的各个频率的振幅都相同,以保证激发信号的一致性。
2.1.3 声音采集模块
声音采集部分主要为笔记本电脑的声卡,在文章中采用Realtek
ALC269 High Definition Audio声卡,声音信号通过笔记本电脑的麦克风输入端口将数据输入声卡。该声卡集成于笔记本电脑,价格低廉,相比较价格昂贵的数据采集卡,具有更较大的价格优势[8-9]。
2.2 軟件设计
2.2.1 软件的结构设计
管道长度测量系统的软件结构示意图如图2所示,软件工作流程图如图3所示。
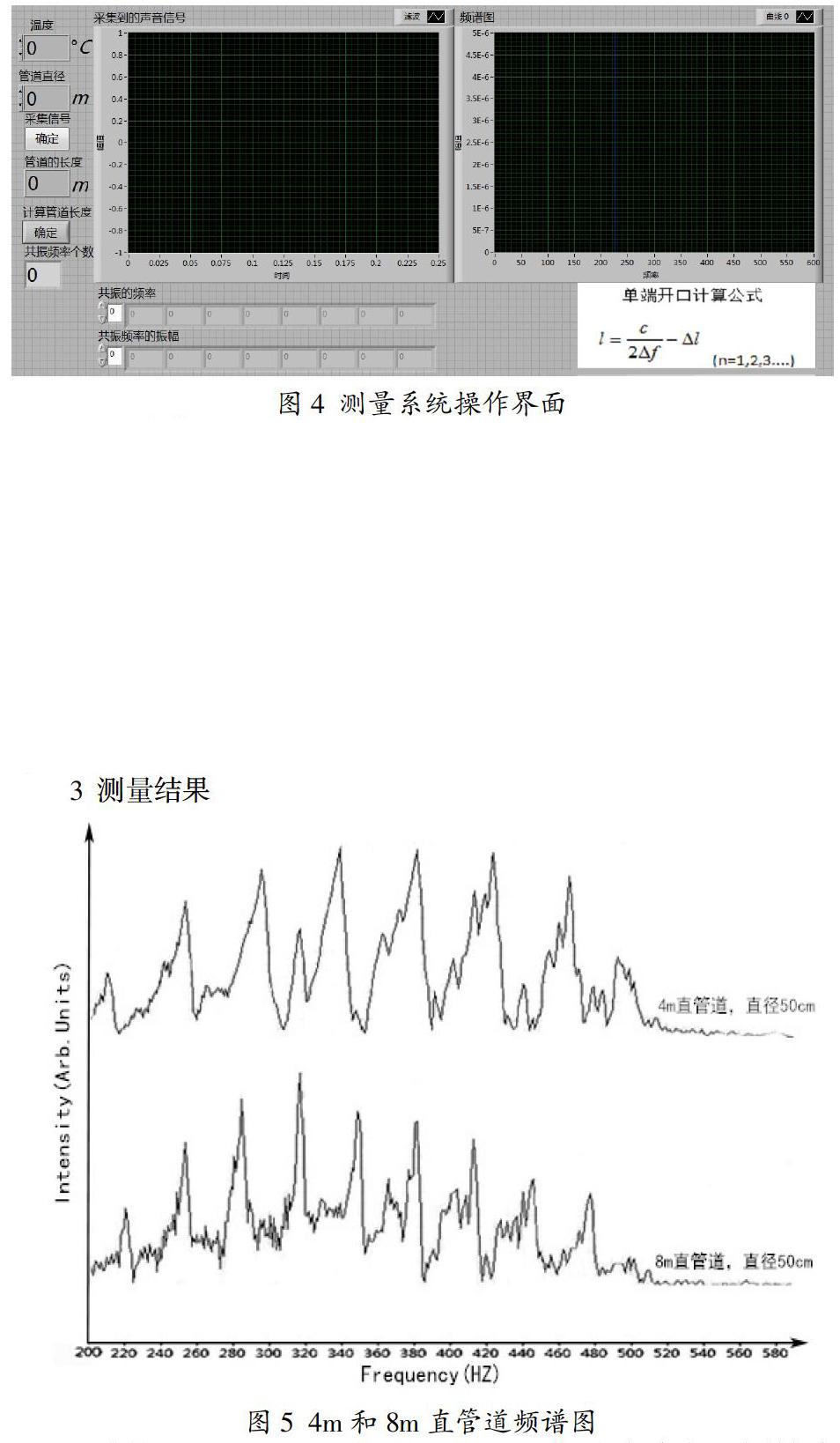
在Labview强大功能的支持下,大大的简化了系统的结构,只需一个操作界面就能实现数据的采集、处理以及显示,使得管道的测量操作极大的简化。所有的操作在前面板上即可实现,测量系统的操作界面如图4所示。
2.2.2 数据处理核心
由MSMAS42Z传感器采集到的声压信号为时域信号,为得出管道的共振频率,需要利用FFT算法对时域信号进行计算方可得出频域信号。因此,本系统调用Labview的FFT频谱算法模块,计算频域信号。
一方面考虑到传感器对较低的音频信号响应较差,另一方面由于高频音频信号不可当成简单的平面波导致不适用于本系统,因此数据处理模块首先需要对时域信号进行滤波处理。本数据处理核心采用带通滤波器,分别过滤掉频率高于450Hz和低于250Hz的频率。
3 测量结果
通常情况下,闭口测量会比开口测量更为繁琐,如闭口测量需要密封末端端口,因此为了满足管道测量的方便性,本系统选用单端开口测量,将拾音器和扬声器放置于管道的同一端口,此种测量方式便于操作,仅需单端放置测量系统即可测量管道的长度。图5是将采集到的音频信号进行了FFT算法变换后的频谱图。在系统设计要求中,利用滤波器过滤掉了250Hz以下和450Hz以上的频率,因此本系统也选取250Hz~450Hz之间的共振频率作为计算数据进行计算。由图5可以清楚看到管道的空气柱的共振频率,其中管道的相邻共振频率之间有着固定的差值,从而由公式(2)可以计算得出管道的长度。
在实验中,本测量系统分别了2m到10m的直管和弯折管,部分管道的测量结果如表1所示。由表1可见,在已测的各种管件中,很容易看出,相比较已知的管道长度,测量的管道长度的相对误差均处于0.7%以下,符合实验误差范围内,具有较高的实用价值。
4 误差分析
本测量系统的误差来源主要有:
(1)工作环境的声速影响
由于本系统利用单端开口测量公式(2)来计算管道长度,由公式(2)可知参数声速的准确性会对测量精度结果产生较大的影响。本系统定义声速为340m/s,但在实际现场的声度会受到温度、空气密度等影响,从而影响测量的精度。
(2)硬件系统的局限性
当采用FFT算法计算共振频率时,其准确性与拾音器的性能、声卡的采样间距、处理器的运算速度等因素有关。任何硬件系统都无法完全消除误差,因此会对实际测量结果产生误差。
(3)管端修正误差
由公式(2)可知,当采用单端开口测量时,需要增加一项修正项△l,由于该修正项本身存在近似误差和管内径测量误差,因而对管长测量产生影响。
5 结束语
(1)基于强大的Labview虚拟仪器技术,结合管内空气柱与声音的共振的基本理论,通过FFT算法精准的计算出共振频率,本系统实现了管道的自动化测量,测量误差小,实验相对误差均小于0.8%,测量误差小。(2)本系统核心组成部分为Labview软件,其硬件部分为简单的传感器的电路以及笔记本电脑,而笔记本电脑已经普及,同时利用声卡作为数据采集系统相比较昂贵的数字采集卡具有成本低廉的优点。(3)本系统抗干扰能力强,工作稳定,容易携带,方便于在各种室外环境中进行作业。同时由于采用单端测量,可以避免在诸如深埋地下管道等无法确定管道另外一端口的测量难题。(4)基于笔记本的强大处理能力,在熟练操作的情况下,整个测量时间仅为15秒,就能实现管道长度的快速测量。(5)本测控系统,自动化程度高,大大简化了操作,降低了科研人员的工作强度,具有较广的市场前景。
参考文献
[1]孙渝生,张自栋.激光在线长度测量仪[J].应用激光,1996(1):17-18.
[2]苏俊宏.用激光干涉法测量长度的智能化处理技术研究[J].应用光学,2002,23(5):11-13.
[3]卢明昌,于亦明,鞠武,等.油管智能激光测长系统[J].石油机械,2004,29(8):34-36.
[4]娄淑琴,孙君曼.激光长度测量的研究[J].郑州轻工业学院学报:自然科学版,1997(1):18-21.
[5]童峰,许水源,许天增.一种高精度超声波测距处理方法[J].厦门大学学报:自然科学版,1998(4):507-512.
[6]鄭英,叶念渝.管长声波测量法的开发与研究[J].微处理机,2000(1):48-51.
[7]郭天葵,钟会林,周述苍,等.基于声共振原理的管道长度测量仪[J].物理实验,2012,32(5):28-30.
[8]尚晓辉,王健,刘锐,等.基于LabVIEW的声卡数据采集与实时处理系统设计[J].军事通信技术,2012(2).
[9]孙爱晶,刘毓,马贺洲.基于LabVIEW的声卡数据采集及滤波处理设计[J].自动化与仪表,2009,24(5):45-47.
猜你喜欢
电脑报(2020年24期)2020-07-15
数字技术与应用(2018年2期)2018-05-14
电脑爱好者(2017年20期)2017-11-03
软件导刊(2017年8期)2017-09-09
江苏农业科学(2014年7期)2014-09-02
微型计算机(2009年4期)2009-12-23
电脑爱好者(2009年19期)2009-10-19
数码家居(2009年6期)2009-08-31
小朋友·快乐手工(2009年5期)2009-06-11
微型计算机(2009年23期)2009-06-01
