利用红外技术和单片机对步进电机的无线控制
2016-10-21 04:55陈锋胡春雷李明才
科学与财富 2016年9期
陈锋 胡春雷 李明才
摘要: 步进电机作为控制装置中的一种执行元件,被广泛使用在控制领域。红外遥控则是一种常见的近距离无线通信手段。文章分析了步进电机原理和红外遥控的编解码技术。最后在此基础上,阐述了以单片机开发平台,利用红外遥控控制步进电机的实现方法。
关键词:步进电机 红外无线遥控 单片机
一、引言
步进电机是将电脉冲信号转变成角位移或线位移的开环控制元步进电机件,当步进驱动器接收到一个脉冲信号,就会驱动步进电机按设定的方向转动一个固定的角度,成为“步距角”,可以通过脉冲信号个数来控制角位移量,通过脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的,目前已被广泛应用于自动化控制等领域。红外遥控是一种短距离无线、非接触控制技术,具有抗干扰能力强,传输可靠,功耗成本,以被用于越来越多的控制领域。在某些较为恶劣或者可能会对人体产生伤害的环境中,需要对步进电机进行无线控制,则可以通过红外遥控技术,实现对步进电机的实时操作。红外遥控技术不需要再设备间布线,仅仅利用红外遥控就可以对步进电机进行无线控制。因此该技术在一些特殊领域应用前景广阔。
二、方案工作原理
(一)、总体方案说明
在系统的硬件设计中,建议单片机硬件尽可能采用功能强的芯片,一方面可以简化电路,另一方面方便后期的扩展,本文采用AT89S51单片机作为主处理器,主要器件包括步进电机、红外遥控器两部分组成,红外控制的功能主要有正转,反转,加速,减速,暂停五个按键组成。
(二)、 具体结构设计
1、红外接收解码处理及接口电路
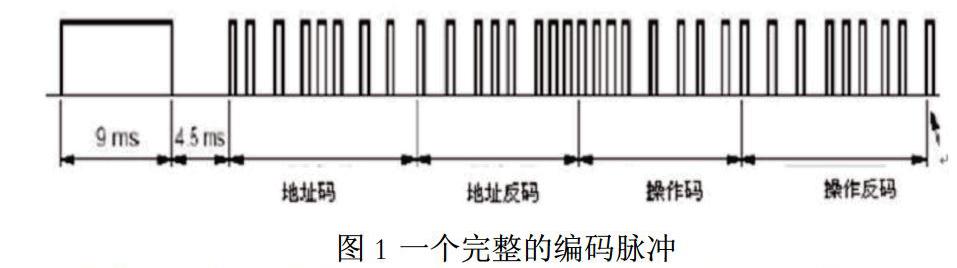
不同公司的遥控芯片,采用的遥控码格式也不一样。较普遍的有两种,一种是NEC标准,一种是PHILIPS标准,本文采用的是NEC标准的WD6122芯片遥控器。一个完整的全码=引导码+用户码+用户码+数据码+数据反码。其中引导码高电平4.5ms,低电平4.5ms;系统码8位,数据码8位,共32位,如图1所示。用户码用来区分不同的红外遥控设备,防止不同遥控设备相互干扰。后16位为8位操作码和操作反码,用来对接收数据进行二次验证。接收端根据接收到的数据码,通过单片机发出动作指令,控制步进电机的工作方式(加速、减速、正轉、反转等)。
根据上面的编码脉冲,程序等待9ms的起始码和4.5ms的结果码完成后才能读码,解码的关键是如何识别0和1,这里通过编码脉冲高电平的宽度开区别0,1。0为窄脉冲0.56ms,1为宽脉冲1.685ms。所以在接收端根据接收到的脉冲宽度或者高电平持续时间进行解码。
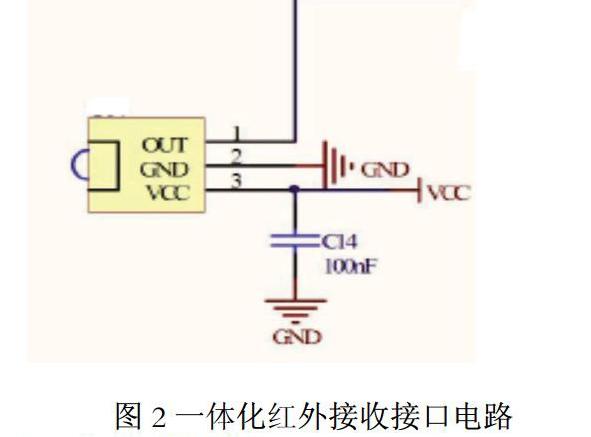
一体化红外接收只有三个引脚:VCC、GND和一个脉冲信号输出引脚OUT,如图2所示,与单片机的接口连接简单方便。VCC接电源+5V并经电容进行滤波,以避免电源干扰; GND接系统的地线(0V);脉冲信号输出接单片机的中断输入引脚。使用这种连接方法,软件解码可以工作于查询方式,也可以工作于中断方式。当有红外信号时,触发中断查询中断时间,并和起始码,“0”、“1”的时间进行比较,从而完成红外解码。
2、步进电机原理及控制电路
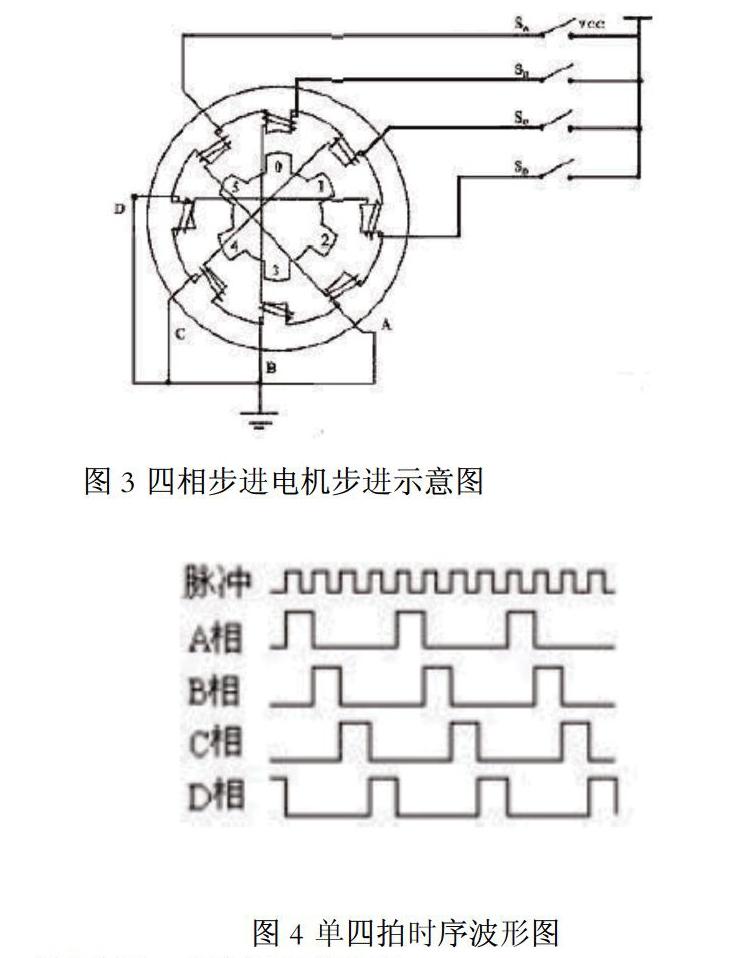
步进电机通过单片机发送的脉冲信号数决定转动角度,转速有脉冲信号频率决定。本文中的步进电机采用的是减速比1/64的五线4相电机,单极性直流电源供电,工作原理图如图3所示。四相步进电机驱动方式可以采用单四拍,双四拍和八拍等方式,这里采用的单四拍的工作,时序波形图如图4所示。
三、 单片机接口部分及软件实现
(一)、 程序流程说明
本文中单片机选用AT89S51单片机作为主处理器,单片机正常工作运行后,启动定时器和外部中断的初始化,当检测到外部红外信号的高电平脉冲后,会触发外部中断,同时定时器中断计数清零并重新计数,统计高电平持续时间,用于后期的解码。当接收完全部32位脉冲后,进行解码,根据解码结果,单片机控制步进电机的工作方式和转动速度。
四、结束语
本文提出的利用红外无线控制步进电机。采用AT89S51单片机作为主处理器,对接收到的红外信号进行解码后控制步进电机工作,设备成本低,结构简单,能够实现对步进电机的无线控制,从而避免在恶劣环境下人员直接操作所带来的潜在危险,完成一些复杂危险的任务。同时可以根据设备现场的场景变化,实时调整步进电机的运行状态。从而提高对步进电机的自动化控制程度。
备注:项目类型: 2013年度省级质量工程项目 卓越人才培养计划
项目名称: LTE通信工程技能型卓越人才培养计划
项目编号: 2013zjjh055
作者简介:
陈锋(1987.09-),男,安徽淮南,工作单位:安徽职业技术学院,助教,硕士研究生学历,研究方向:嵌入式,软件算法。
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年12期)2018-08-01
电子制作(2017年19期)2017-02-02
科学家(2016年3期)2016-12-30
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年24期)2016-10-11
科技视界(2016年15期)2016-06-30
科技视界(2016年7期)2016-04-01