基于磁场指纹辅助的手机室内定位系统*
2016-10-21 11:32:12杨增瑞段其昌毛明轩段盼黄晓刚
传感技术学报 2016年9期
杨增瑞,段其昌*,毛明轩,段盼,黄晓刚
(1.重庆大学自动化学院,重庆400044;2.国网重庆市电力公司南岸供电分公司,重庆400060;3.国网重庆电力公司潼南供电公司,重庆402660)
基于磁场指纹辅助的手机室内定位系统*
杨增瑞1,段其昌1*,毛明轩1,段盼2,黄晓刚3
(1.重庆大学自动化学院,重庆400044;2.国网重庆市电力公司南岸供电分公司,重庆400060;3.国网重庆电力公司潼南供电公司,重庆402660)
针对当前室内无线定位信号强度易受干扰、设备部署维护成本高等缺点,以及手机在室内航位推算过程中定位误差随时间累积的问题,本文提出了基于粒子滤波磁场匹配的室内定位方法。相比于传统的航位推算方法,通过改进步态判断方式,并提出了动态步长估计算法和卡尔曼滤波航向估计算法,有效减少步态误判和定位误差。同时通过结合航位推算位置选择粒子滤波算法中的重采样区域,加快粒子收敛速度。最后,通过仿真分析和实际室内环境测试结果表明,本文提出的定位方法能够有效地减小定位误差,并实现2米的定位精度。
地磁匹配;航位推算;室内定位;卡尔曼滤波;粒子滤波
EEACC:5100doi:10.3969/j.issn.1004-1699.2016.09.025
随着近年智能设备的兴起以及人们对精确定位服务的需求,室内定位技术成为人们研究和关注的焦点。目前,主流的室内定位技术包括A-GPS[1]、红外线定位[2]、超声波定位[3]、惯性传感器定位[4]、蓝牙定位[5]、射频识别定位[6]、WiFi室内定位[7]和超宽带定位[8]等技术。定位方法主要有TOA、TDOA、RS⁃SI测距以及RSSI指纹[9-10]。其中,因WiFi在商场、飞机场、博物馆等大型室内场所的广泛部署和应用,WiFi定位技术已成为较为流行的室内定位技术。但是,WiFi定位精度的提高需要较多基站的部署,这也成为限制无线定位技术发展的瓶颈。
地磁导航技术的研究始于20世纪50年代,主要是利用地磁场的矢量匹配对导弹和船只的导航和定位[10]。近年,研究者发现钢筋混凝土结构建筑室内的磁场具有特殊性和稳定性,可以作为磁场信标,利用这种室内磁场特性便可以建立依据磁场强度的室内定位系统。因此,地磁定位技术也成为了室内定位技术研究的新方向之一。目前,国内外对地磁定位的研究已经取得了一定的成果,但主要集中在磁场匹配算法及相关仿真的研究。宋镖[12]等人设计了惯导辅助地磁的手机室内定位系统,实现了商场内1 m左右的定位精度;Chung[13]等人提出了基于多磁力计的磁场向量匹配定位方法,利用4个3轴磁力计采集不同方向的磁场矢量,实现了室内88%的情况下1 m的定位精度,但该方法需要佩戴专用测量设备;Kim[14]等人对磁场的手机行人定位方法进行了研究,通过手机内置传感器实现了小于3 m的定位精度;谢宏伟[15]等人设计一款基于稳定性增强粒子滤波磁场匹配算法的手机室内定位系统,该系统实现了在未知初始方向和位置的情况下的定位,并达到了1 m~2 m的定位精度。但该算法实现复杂,计算速度慢;Haverinen[16]等人开发了基于粒子滤波的室内定位系统,该系统要求用户行走时行进方向必须与长廊的方向一致;刘文远[17]等人通过建立多维的指纹地磁信息,利用最小均方根算法校正移动设备的轨迹,实现了87.5%情况下的1.2 m的定位精度。通过分析,可以发现现有的室内地磁定位方法为了增加匹配特征量往往需要进行大量的数据采集和计算,或是通过和无线方式结合需要部署相应的设备,这都给室内地磁定位技术带来了局限性。
本文通过对惯性导航和磁场定位研究分析,提出了基于惯导和磁场组合的手机室内定位方法。当检测到一个步态周期完成时,采用选择区域的粒子滤波估计当前位置。该算法可以在提高定位速度的同时,也满足了室内定位精度的要求。
1 磁场指纹辅助的室内定位原理
本系统主要利用磁场定位和航位推算融合实现室内的追踪和导航。在室内环境中,路径一般为直线段和90°转角组成。因此,在手机正常使用状态下,结合室内平面图可以精确的实现二维平面的室内定位。目前,几乎所有的智能设备都内置了惯性传感器。但这些低成本传感器往往具有精度不高,零点漂移和抗干扰差等缺陷。因此,智能设备的室内定位主要采用航位推算的方式。航位推算主要是利用加速度计、陀螺仪、磁力计等惯性传感器进行步态检测、步长推算和方向推算[18]。
地磁匹配定位技术是一种低成本和原理简单的室内定位方式,包括两个阶段:离线阶段和在线阶段。在离线阶段,通过手机磁力计采集网格点的磁场数据,这些位置点的磁场数据便被称为磁场指纹,它类似于RSSI指纹,代表着相关位置点的磁场强度等信息,利用磁场指纹与空间插值算法可以构建高精度的磁场地图;在线阶段,首先采用航位推算粗略的估计用户的位置。然后,通过磁场匹配算法将当前位置的磁场数据与磁场地图进行相应的匹配获取精确的位置估计。磁场匹配室内定位系统的框图如图1所示。
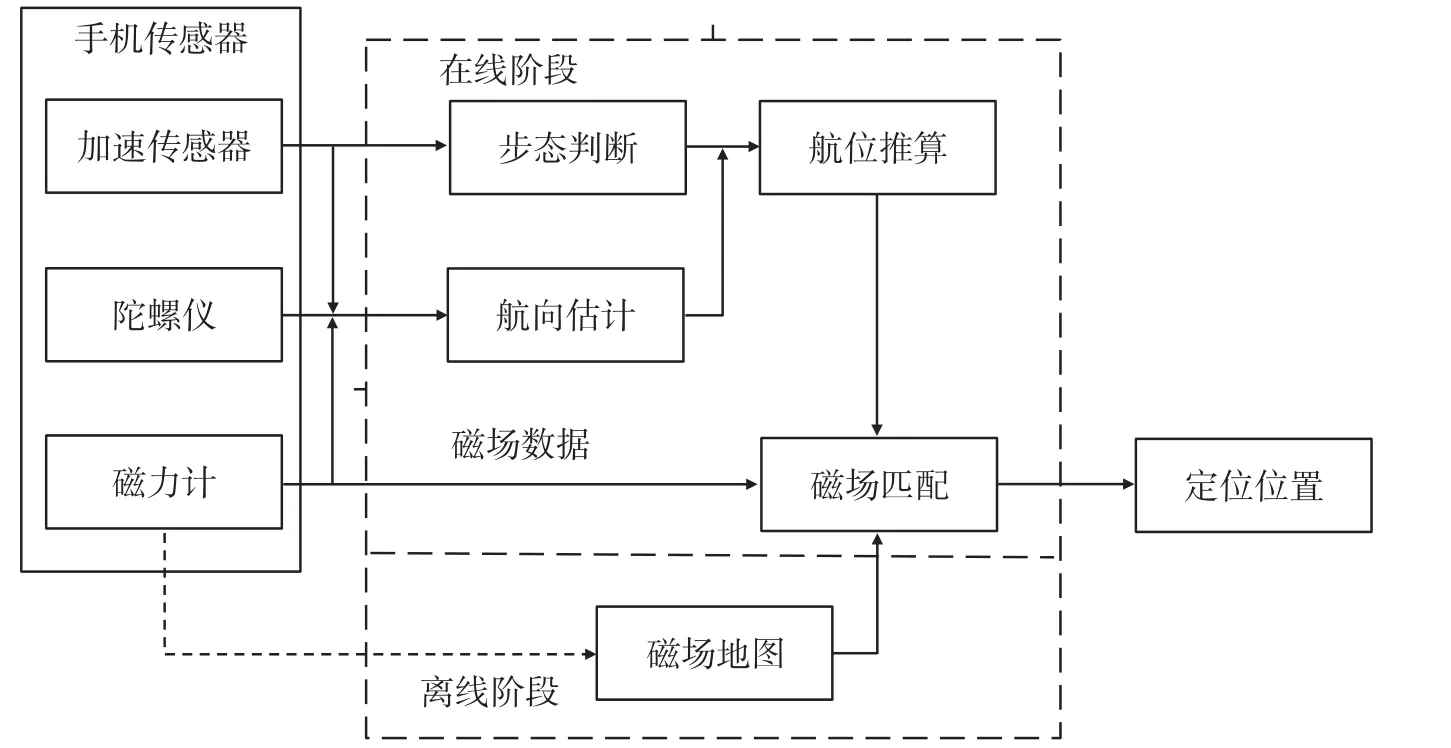
图1 磁场匹配辅助的室内定位系统框图
2 航位推算
前面阐述了磁场指纹辅助的室内定位原理,接下来详细介绍步态检测、动态步长估计和航向估计。算法的改进将有助于减少步态误判和定位误差。
2.1步态检测
步态检测是航位推算室内定位算法中最基本的部分。目前,国内外文献中计步算法的研究也有很多[19]。通常,为了能够实现用户使用手机在不同运动模式下的步态检测,本文采用加速度幅值进行步态检测。在用户行走过程中,手机加速度幅值会呈现周期性变化,一般频率在2 Hz~3 Hz左右,而手机加速度采样频率设定为50 Hz。为了减少噪声干扰,首先将加速度采样数据通过IIR低通滤波器进行滤波处理。为了进一步减少加速度波形中毛刺对步态的误判,采用滑动窗口对数据进行平滑处理。此次平滑处理的数据仅为了便于步态的判断,不用于步长的估计。
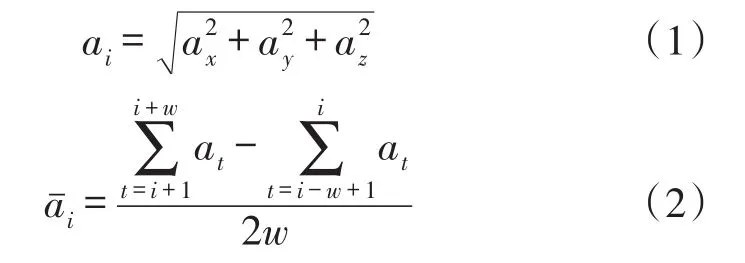
式中,ax,ay和az分别表示在x,y和z轴上的手机加速度,ai为第i个采样点的加速度幅值,w表示平滑窗口的长度,表示第i个采样点平滑后的加速度幅值。
本文采用上升过零点检测和峰值检测结合的方法进行步态判断。因为手机使用过程中的随机抖动和传感器噪声的影响,加速度波形会出现很多非正常步态下的过零点和峰值点。为了更为准确的进行步态检测,本文采用多阈值对有效的过零点和峰值进行识别。首先,进行上升过零点的检测,上升多零点的加速度值满足如下不等式:

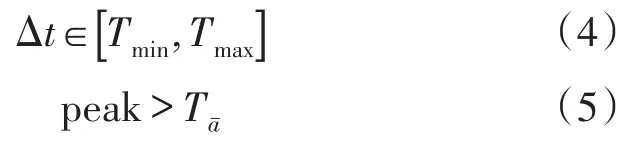
为了进一步提高阈值判定的稳定性,将阈值设置为动态阈值,通过步态周期内最大值和最小值求中值,与初始阈值T0修正,动态阈值公式表示为:

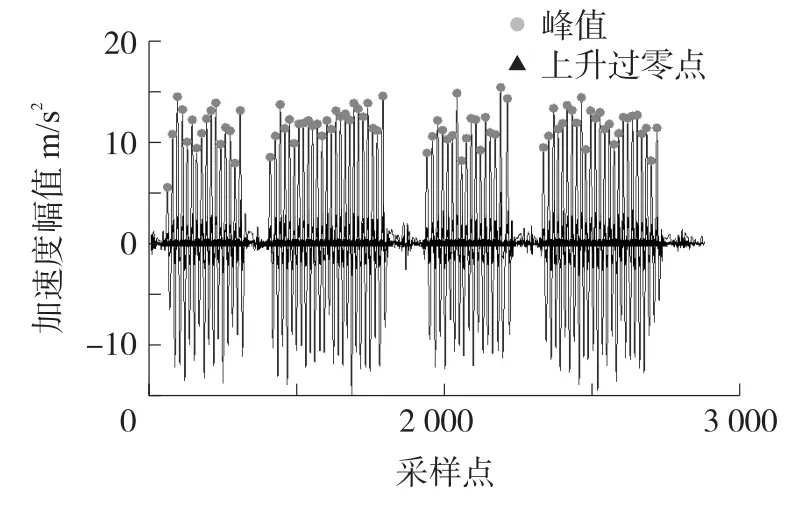
图2 步态检测加速度数据处理结果图
2.2步长估计
鉴于每个人的身体条件和步行方式不同,步长往往具有随机性,而步长的估计直接影响定位精度,因此选择合适的步长计算模型是步长估计的关键。通过相关研究,Ladetto Q[20]提出步长与步频和加速度方差成线性关系,通过离线训练可以得到模型估计参数[]
α,β,λ。

式中f表示步伐频率,av是步态周期内的加速度方差,λ为估计参数,l表示步长。
这里,为了验证步态检测算法和步长估计模型的有效性,本文设计并进行了不同实验。实验者以不同模式进行40 m的直线行走测试。实验结果如表1所示。
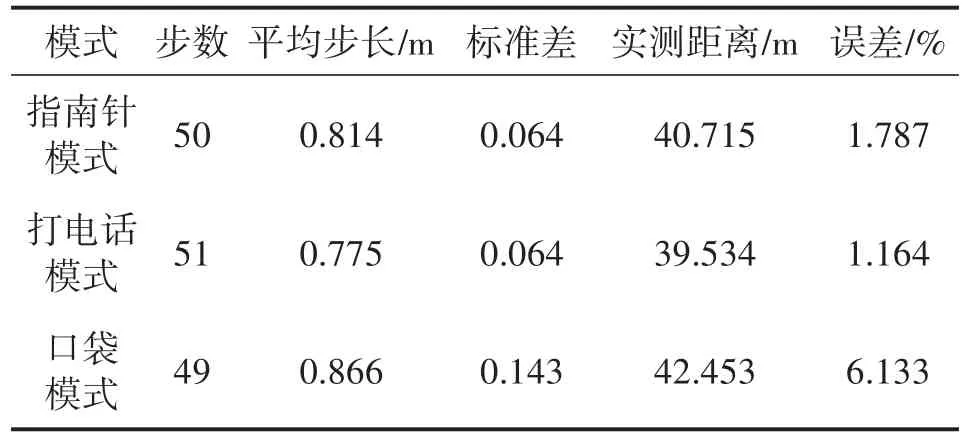
表1 实验结果
由表1可知,针对不同模式,步态检测算法可以有效的进行步伐检测。但在口袋模式下步长估计却出现了较大的误差,因此在40 m的距离测量下误差达到了6.133%,这样的误差在室内定位中是不能接受的。通过数据分析发现,手机在口袋中不规律摆动会造成加速度的波形十分不规则,并出现在一个步伐周期内多峰值的现象。上述原因导致了步伐周期内加速度的方差偏大,这也造成了线性步长估计模型估计的步长偏大。为解决该问题,可以通过手机姿态对手机使用模式进行识别,当手机在不同模式下时,采用不同参数值的步长估计模型。本文中,为了提高系统的适应性,提出了动态步长估计算法。在磁场定位后,可以获得当前位置和前一步位置的距离,在满足一定定位精度的情况下,利用该距离修正过的步长更接近真实步长。在实际中,如果粒子滤波不能够正确的收敛,该方法是不能保证结果的正确性的。为了实现方法的可行性,本文采用长度为N的队列Q去获取可靠的相邻定位点的距离值。除去队列中最大和最小值,采用队列的平均值去修正下次定位循环中的估计步长,动态步长估计模型被定义为:

式中,q是修正参数,lML为队列Q中相邻定位点的距离值,min(Q)和max(Q)分别表示队列Q中的最大和最小值。
2.3航向估计
Android智能手机都内置了方向传感器,用于测量手机y轴和地磁北极的夹角。通过参考Android软件开发包[21],知道方向传感器作为虚拟传感器,利用加速度传感器和磁力计数据获取方向。实际中由于室内地磁异常的干扰,手机方向传感器读出的数据往往存在偏差。为了有效的提高航向估计的精度,本文中采用卡尔曼滤波融合三轴加速度、陀螺仪和磁力计数据估计最优的航向角。
文中,选取旋转四元数作为方向状态矢量。根据陀螺仪四元数模型[22],四元数微分方程如式(10)。同时,可将式(10)表示为式(11)的矩阵形式。
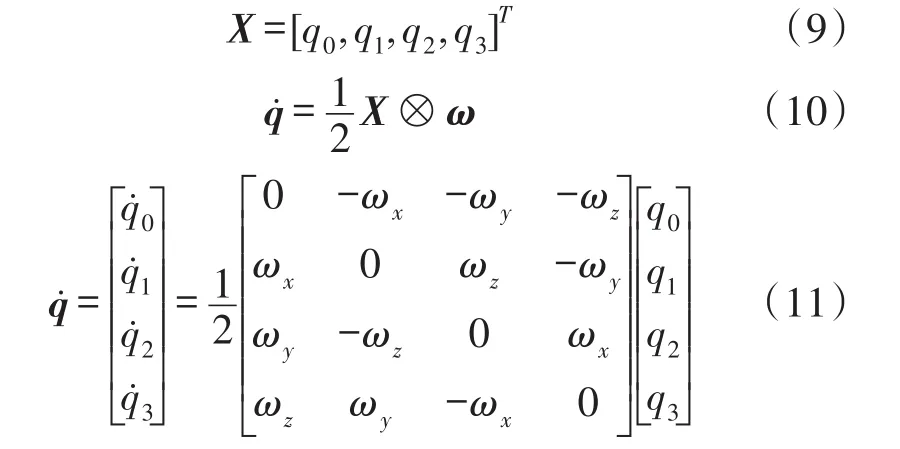
式中,q0是四元数的实部,q1,q2和q3表示四元数的虚部,ω=[ωx,ωy,ωz]表示在x,y和z轴上的陀螺仪数据,⊗表示四元数乘法运算。由此,可以得到卡尔曼滤波的状态方程为

其中,Δt表示采样间隔,wk是过程噪声矢量,F表示状态转移方程。
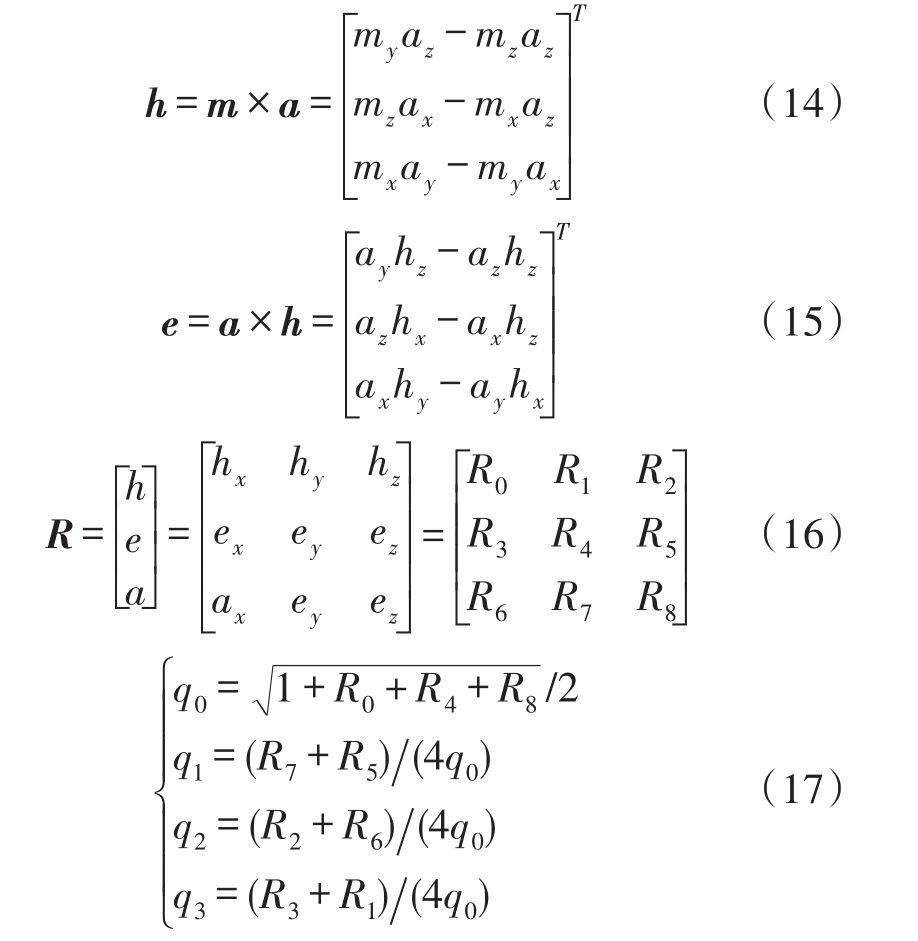
将加速度计测量值和磁力计测量值为基础得到的旋转四元数作为观测量。当手机在静止状态并载体坐标系和惯性坐标系一致的时候,加速度矢量将朝向地心,磁场矢量对准磁场北极。此时,重力加速度和磁场强度的表示为

式中,g是重力加速度,my和mz分别表示在东北天坐标系中磁场强度在水平和垂直方向上的分量。
接着,利用式(14)计算加速度和磁场矢量的正交向量h;进一步,计算加速度归一化矢量和向量h归一化矢量的向量积为向量e,如式(15);至此,归一化的矢量h,e和a将可以表示东北天坐标系,即手机载体坐标转换的旋转矩阵,见式(16);对于旋转矩阵,可以依据转换式(17)[23]获得旋转四元数矢量。
通过上述方法,观测方程便可以由加速度计和磁力计的测量矢量计算得到,利用观测方程便可以更新得到旋转四元数。

式中,f(·)表示式(14)~式(17)的利用加速度计和磁力计测量值计算旋转四元数的方法,vk表示测量噪声矢量。
图3展示了实际测试中航向角的变化过程,相比方向传感器的原始数据,本文采用的航向估计算法对航向角有明显的改善。从图4中可以得到,本文算法计算的航向误差相比方向传感器的测量数据减少了66.4%,并且该方法的平均绝对误差可以控制在5°以内。但是航向角的误差依然会导致定位误差的累积,为此本文采用室内平面图信息去修正在室内定位过程中出现的“穿墙”现象。
依据上述的航位推算算法,便可以在已知初始位置的前提下,推算出下一时刻位置,其转移方程可表示为:

式中,(x,y)表示用户的位置坐标,lˆ是步长估计长度,θ表示航向角。
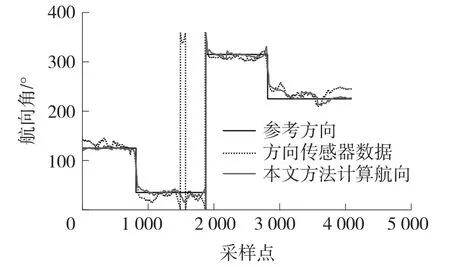
图3 航向估计测试
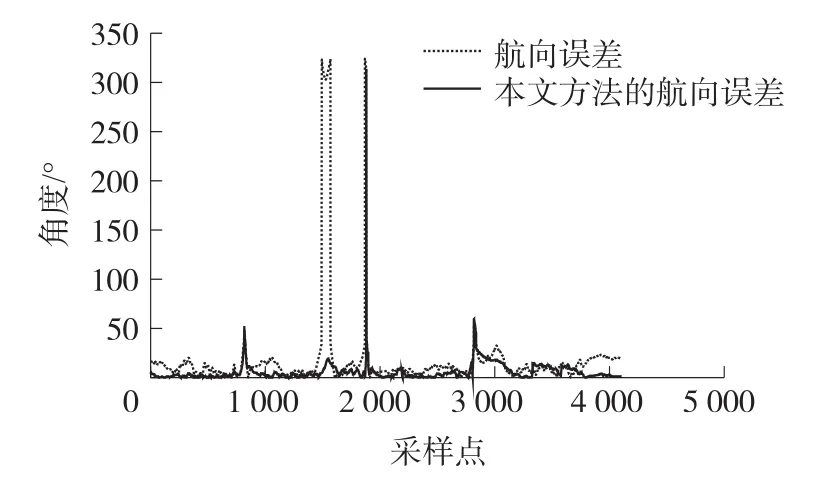
图4 方向误差
3 地磁定位算法
地磁定位中地磁匹配算法是关键部分,合适的匹配算法可以有效的提高定位精度和效率。地磁匹配算法主要是基于相似度度量的一种方法,主要是通过测量值和基准值的相似程度或差别程度为基准进行相关匹配的算法。目前在采用指纹方法室内定位系统中,粒子滤波因其在非线性和非高斯系统中的优势成为了较为热门的研究算法。粒子滤波的核心思想是通过计算一组随机样本的蒙特卡洛估计来表征待估计的后验概率分布,而随机样本由带有权重的粒子组成[24-25]。
3.1粒子滤波算法
粒子滤波主要包括三个基本部分:状态转移方程,观测方程和重采样。本文中,状态转移方程即为式(19)。粒子滤波过程中,本文选取用户位置坐标和航向角作为状态量,由航位推算算法可以容易更新位置坐标和航向角。然而,为了使估计状态更接近真实状态,在滤波过程中需要对每个粒子设置权重。粒子的权重计算一般采用概率模型其中z表示地磁强度,如式(21)。


实际上,由于P()z|s依赖位置点的磁场强度变化和构建的磁场地图特性,无法得到具体的概率模型。但测量磁场值与实际磁场值之间的偏差Δz服从高斯分布,即Δz~N(0,σΔz),σΔz为传感器的偏移标准差,一般由传感器说明书给出。因此在计算每个粒子权重时概率模型一般使用目标观测似然函数[26]:

式中map(s)表示s状态时地磁地图中的磁场强度观测值,w是粒子的权值。在实际中,结合室内平面图当粒子的运动超出实际路径的范围时,进行错误粒子的舍弃,粒子权重设置为0。
3.2自适应区域选择重采样
随着迭代次数的增加,粒子会出现退化现象,即少数的粒子会占有较大的权值,粒子失去多样性,从而当运动状态发生突变时容易产生跟踪失败。为了解决这个问题,国内外学者提出了很多重采样方法。本文中对于提高重采样的方式是基于有效粒子数量和选择重采样区域。本文定义经过归一化后粒子权重非0的粒子为有效粒子,并用Neff表示有效粒子数。为了控制粒子退化的速度,设定一个K值,对有效粒子数量进行判断,确定是否需要进行重采样。当有效粒子数量大于阈值K时,粒子滤波进行重采样;反之,不进行重采样。
此外,通过航位推算可以估计相应定位位置(x,y),定位误差derr也可以通过测量获取到。因此,本文以定位位置点为中心建立一个环形区域,该区域作为重采样过程中优先复制的粒子所在区域,区域外权重较大的粒子进行舍弃,避免高权重粒子集中在误差范围外。自适应区域选择重采样方法一方面可以有效的粒子较少时,重采样造成的粒子退化问题,另一方面通过区域选择重采样可以对粒子群进行校正更新。最后,利用当前粒子的加权平均和作为真实状态。

式中,粒子权值w已经进行了归一化。至此,一步完整的定位迭代结束,当下一个步伐检测完成时进行下一次粒子滤波的迭代计算。改进的粒子滤波地磁定位算法流程图如图5所示。
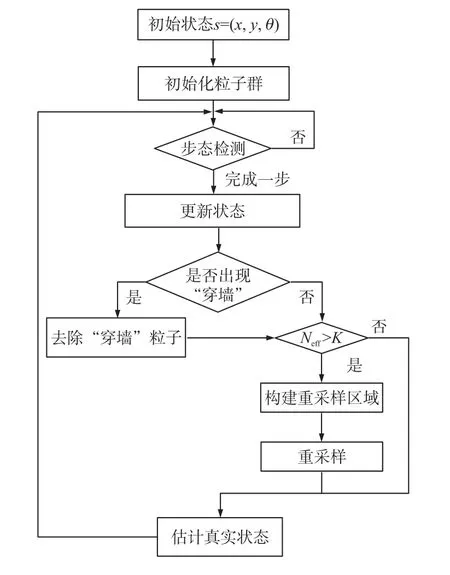
图5 改进粒子滤波地磁匹配定位算法流程
4 实验设计与结果分析
为了验证本文提出的基于磁场指纹辅助的手机室内定位系统的可行性,本文进行了实际室内环境测试实验。本文选取重庆大学主教学楼21楼走廊作为实验场地。将实验场地区域划分为0.8 m× 0.8 m的网格,使用三星手机GT-I9300在1.3 m高度对每个网格点进行磁场强度的测量,其中每个网格点测量50组磁场强度数据求平均值作为磁场地图数据。本次实验采集了258组数据作为磁场指纹。为了提高磁场定位的精度,本文采用克里金插值算法[27-28]对数据进行0.1 m间隔的空间插值,得到网格精度更高的室内地磁地图。其中,手机磁场采集应用界面和插值后的磁场地图如图6所示。

图6 地磁采集应用程序和磁场地图
4.1室内定位分析
本次实验中,假设初始位置已知,实验者水平手持手机在实验场地中沿67 m长度的走廊行走一周。在行走过程中,以50 Hz的频率采集并保存加速度计、陀螺仪和磁力计数据,最终测量步数为83步。本文进行了3种不同方法的定位测试:第一种是使用原始方向传感器数据作为航向的航位推算定位方法,记为PDR;第二种是基于本文卡尔曼滤波航向估计的航位推算定位,记为KFPDR;第三种方法为采用本文提出的基于磁场辅助的航位推算定位方法,该方法的航向估计是基于卡尔曼滤波估计和地图信息修正获取,记为MAPDR。通过比较不同定位方法的定位误差和误差分布,对本文提出的方法进行性能的评估,以验证该方法的有效性和可行性。
图7表明,采用方向传感器数据作为航向的航位推算定位方法的定位误差随着时间的推移越来越大。在极短的时间内,定位误差便可以累积达到10 m左右。而采用了本文卡尔曼滤波的航向估计的航位推算定位方法在一定程度上起到了减少定位误差的作用。通过对第二种定位方法轨迹的观察,发现在转弯时会出现测量转向角度要小于实际的转向角度的现象,这种差异对定位精度产生了很大的影响。针对这种现象,在本文提出的定位方法中对运动中转向行为进行识别,利用地图信息进行角度的修正。同时,当定位位置出现“穿墙”现象时,将采用地图中的参考方向进行航位推算。通过不同定位方法定位轨迹的比较,本文提出的基于磁场指纹辅助手机室内定位方法不仅可以有效的提高定位的精度,而且可以解决定位误差累计的问题。
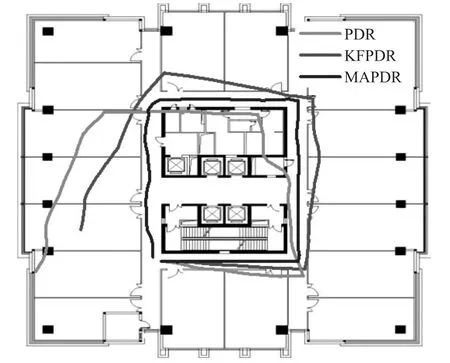
图7 不同方法的室内定位轨迹图
由图8可知,本文提出的定位方法的定位误差保持在2.5 m以下,并且达到了在98%情况下定位误差2 m以内的测试效果,而其他两种定位方法的2 m以内误差分布分别为34%和61%。表2展示了不同定位方法的平均误差和最大误差,相比于前两种方法,本文的定位方法的平均误差分别减少了67.6%和44.1%,最大误差分别减少了77.5%和68.4%。实验表明通过合适的地磁匹配算法,可以有效的提高室内定位精度。
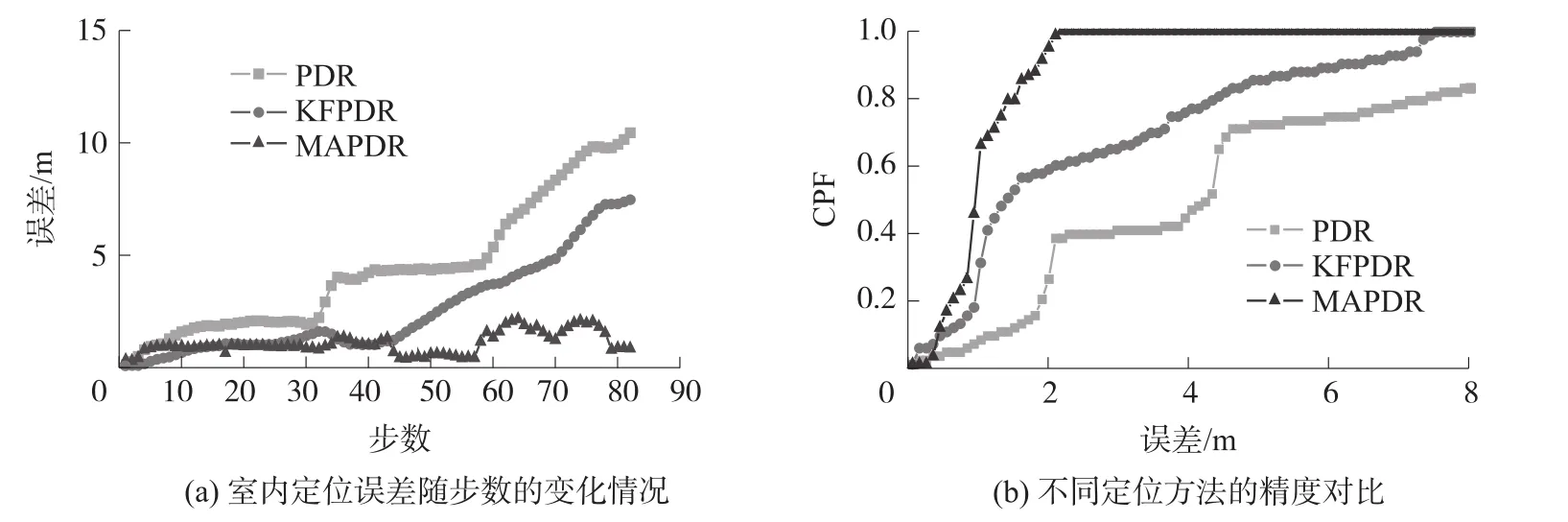
图8 室内定位误差和误差分布

表2 定位结果
5 结论
相比于其它定位技术,磁场指纹辅助的航位推算定位方法仅需要预先采集磁场地图,而不需要依赖其它任何设备。基于这一优势,本文结合航位推算和磁场定位两种定位技术提出了基于磁场指纹辅助的手机室内定位系统,并针对航位推算算法改进步态检测算法,提出动态步长估计模型和卡尔曼滤波的航向估计算法,以及针对磁场定位算法提出自适应区域选择的重采样方法。实验结果表明该方法能够实现室内2 m的定位精度,证明了该方法的可行性和有效性。为了更为准确的定位,本文利用了转角检测和室内地图信息修正航向的方法。在未来的研究中,我们也可以结合WLAN RSSI的定位方法去进一步提高系统的灵活性和稳定性。智能终端实现室内移动目标的定位与导航,在大型室内商场、博物馆和停车场将具有广泛的应用价值。
[1]秦杰,陈希,武穆清.A-GPS定位技术的研究与应用[J].数字通信世界,2007(3):54-56.
[2]Want R,Hopper A,Falcao V,et al.The Active Badge Location System[J].ACM Trans on Information Systems,1992,10(2):91-102.
[3]Ward A,Jones A,Hopper A.A New Location Technique for the Active Office[J].Personal Communications,IEEE,1997,4(5):42-47.
[4]Woodman O J.An Introduction to Inertial Navigation[J].Comput⁃er Laboratory,University of Cambridge,Tech Rep UCAMCL-TR-696,2007,14:15.
[5]Iglesias H J P,Barral V,Escudero C J.Indoor Person Localization System through RSSI Bluetooth Fingerprinting[C]//Systems,Sys⁃tems,Signals and Image Processing,2012 19th International Con⁃ ference on.IEEE,2012:40-43.
[6]王小辉,汪云甲,张伟.基于RFID的室内定位技术评述[J].传感器与微系统,2009,28(2):1-3.
[7]Hong F,Zhang Y,Zhang Z,et al.WaP:Indoor Localization and Tracking Using Wifi-Assisted Particle Filter[C]//Local Computer Networks(LCN),2014 IEEE 39th Conference on.IEEE,2014.210-217.
[8]Mahfouz M R,Fathy A E,Kuhn M J,et al.Recent Trends and Ad⁃vances in UWB Positioning[J].Wireless Sensing,Local Position⁃ing,and RFID,2009.IMWS 2009.IEEE MTT-S International Mi⁃crowave Workshop on.IEEE,2009.1-4.
[9]阮陵,张翎,许越,等.室内定位:分类、方法与应用综述[J].地理信息世界,2015,22(2):8-14.
[10]刘晓叶,徐玉斌.基于自适应射频指纹地图的WSN室内定位算法研究[J].传感技术学报,2015,28(8):1215-1220.
[11]DeGregoria A.Gravity Gradiometry and Map Matching:An Aid to Aircraft Inertial Navigation Systems[R].Air Force Inst of Tech Wright-Patterson Afb Oh Graduate School of Engineering And Management,2010.
[12]宋镖,程磊,周明达,等.基于惯导辅助地磁的手机室内定位系统设计[J].传感技术学报,2015,28(8):1249-1254.
[13]Chung J,Donahoe M,Schmandt C,et al.Indoor Location Sensing Using Geo-Magnetism[C]//Proceedings of the 9th International Conference on Mobile Systems,Applications,and Services,2011:141-154.
[14]Kim S E,Kim Y,Yoon J,et al.Indoor Positioning System Using Geomagnetic Anomalies for Smartphones[C]//Indoor Positioning and Indoor Navigation,2012 International Conference on.IEEE,2012:1-5.
[15]Xie H,Gu T,Tao X,et al.A Reliability-Augmented Particle Filter for Magnetic Fingerprinting based Indoor Localization on Smart⁃phone[J].IEEE Trans on Mobile Computing,2014,13(9).
[16]Haverinen J,Kemppainen A.Global Indoor Self-Localization Based on the Ambient Magnetic Field[J]Robotics and Autono⁃mous Systems,2009,57(10):1028-1035.
[17]刘文远,张荣吉,王林,等.地磁信息辅助的多维指纹室内移动轨迹映射方法[J].电子与信息学报,2013,35(10):2397-2402.
[18]蔡敏敏.基于行人航位推算的室内定位技术综述[J].微型机与应用,2015,34(13):9-11.
[19]Harle R.A Survey of Indoor Inertial Positioning Systems for Pe⁃destrians[J].Communications Surveys and Tutorials,IEEE,2013,15(3):1281-1293.
[20]Ladetto Q.On Foot Navigation:Continuous Step Calibration Using Both Complementary Recursive Prediction and Adaptive Kalman Filtering[C]//Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation,2000.1735-1740.
[21]Android SDK and Documentation,Available online:http:// developer.android.com/intl/zh-cn/reference/android/hardware/Sen⁃sorManager.html.
[22]Sabatini A M.Quaternion-Based Extended Kalman Filter for De⁃termining Orientation by Inertial and Magnetic Sensing[J]IEEE Trans on Biomedical Engineering,2006,53(7):11346-1356.
[23]Kirtley C.Summary:Quaternions vs.Euler angles.Available on⁃line:http://isb.ri.ccf.org/biomch-l/archives/,2001.
[24]姜竹青.自主导航中滤波算法的研究及应用[D].北京:北京邮电大学,2014.
[25]马嘉斌.基于便携设备行人航位推算的室内定位研究[D].上海:上海交通大学,2014.
[26]Marins J L,Yun X,Bachmann E R,et al.An Extended Kalman Filter for Quaternion-Based Orientation Estimation Using MARG Sensors[C]//Proceedings of Intelligent Robots and Systems,2001 IEEE/RSJ International Conference on.IEEE,2001(4):2003-2011.
[27]弋英民,刘丁.基于单目视觉的轮式机器人同步定位与地图构建[J].仪器仪表学报,2010,31(1):117-121.
[28]Bishop G C.Gravitational Field Maps and Navigational Errors[J].IEEE Journal of Oceanic Engineering,2002,27(3):726-737.
杨增瑞(1991-),男,硕士生,主要研究方向为室内定位,嵌入式系统,以及故障检测等,yzr@cqu.edu.cn;

段其昌(1953-),男,教授,主要研究方向为新能源系统先进控制与应用研究,复杂系统智能计算、建模、控制与优化,网络化综合智能控制与信息处理,GPRS、GPS、GIS、RFID和嵌入式应用技术研究,图像识别与处理应用研究以及系统容错与可靠性研究等,qc_d@sina.com。
Magnetic Fingerprinting Assisted Indoor Localization System on Smartphone*
YANG Zengrui1,DUAN Qichang1*,MAO Mingxuan1,DUAN Pan2,HUANG Xiaogang3
(1.School of Automation,Chongqing University,Chongqing 400044,China;2.State Grid Chongqing Electric Power Company Nan’an Power Supply Subsidiary Company,Chongqing 400060,China;3.State Grid Chongqing Electric Power Company Tongnan Power Supply Subsidiary Company,Chongqing 402660,China)
Due to in the current wireless based indoor positioning method the received signal strength are suscepti⁃ble to interference,the cost of equipment deployment and maintenance is high,and the question of in Pedestrian Dead Reckoning(PDR)systems localization error accumulated by time,this paper presents an indoor positioning sys⁃tem on smartphone,which uses magnetic matching positioning methods built on particle filter to correct localization error in the PDR approach.Compared to the traditional PDR method,the proposed method improves the step detec⁃tion method and applies a dynamic step length estimation algorithm and heading estimation according to Kalman fil⁃ter to enhance the robustness and minimize errors.In addition,an adaptive region selection resampling algorithm is introduced to accelerate the rate of convergence.Finally,through conducting comprehensive experiments and tests,and the results show that the proposed technique can reliably achieve 2 meters precision in a large building.
magnetic matching;pedestrian dead reckoning;indoor localization;kalman filter;particle filter

TP212.9
A
1004-1699(2016)09-1441-08
项目来源:国家自然科学基金项目(51377187);重庆市研究生科研创新项目(CYS16033)
2016-03-28修改日期:2016-05-14
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
当代陕西(2022年6期)2022-04-19 12:11:54
娃娃乐园·综合智能(2021年12期)2022-01-18 05:46:42
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
中学生数理化·高二版(2016年12期)2017-02-28 10:08:42
Coco薇(2016年1期)2016-01-11 16:53:24
河北科技大学学报(2015年5期)2015-03-11 16:16:37
发明与创新(2015年33期)2015-02-27 10:40:00