
空间碎片清除技术的分析与比较
2016-10-20 10:26霍俞蓉
兵器装备工程学报 2016年9期
霍俞蓉,李 智
(中国人民解放军装备学院,北京 101416)
【基础理论与应用研究】
空间碎片清除技术的分析与比较
霍俞蓉,李智
(中国人民解放军装备学院,北京101416)
为了保证航天器的安全以及航天任务的圆满完成,提出了空间碎片的清除技术。随着空间环境污染的严重而愈发丰富,部分技术已在地面进行了试验。由于空间碎片往往属于非合作性目标,并且没有可控的动力装置,至今仍没有一个空间碎片真正被清除过。如何对非合作空间目标碎片进行合理有效地清除以避免产生新的碎片是清除技术研究面临的挑战和难点。对现有空间碎片清除技术进行了分析与比较,阐述了清除技术的框架结构,列出了每种技术的优缺点,描述了每种清除技术相应的工具,总结了每种技术方法研究的趋向。
空间碎片;碎片清除;非合作性
自1957年人类发射第一颗人造卫星起,空间碎片数目越来越大,给空间环境带来了极大的安全威胁和污染。KesslerSyndrome[1]表示即使停止把卫星送入太空,由于持续不断地碰撞,空间碎片也会越来越多。截止到2015年10月底,可编目的空间物体共41 014个,在轨的有17 340个,空间碎片11 160个、火箭体2 040个、载荷4 138个[2],其中大部分空间目标和人造空间碎片都来自于美俄两国的航天器。
空间碎片的持续增长会影响到航天任务顺利进行、航天器的正常运行以及航天员的生命安全等。每一年或者两年都会发生航天器与空间碎片的碰撞事件。为了防止碰撞事件的发生,中美俄等具备一定航天实力的国家以及组织都拥有碰撞预警系统对即将和可能发生的碰撞事件进行预警。虽然大部分低轨区域的空间碎片会在大气阻力等摄动力作用下坠入大气层,但这将用近20多年的时间来完成;而高轨目标由于几乎不受大气阻力,在此区域的空间碎片往往是长期运行在轨道上,因此只进行预警只是减少发生碰撞的几率,并不能从根本消除空间碎片碰撞威胁,因此必须采用空间碎片清除技术(ActiveDebrisRemoval,ADR)清除轨道上现存的空间碎片,彻底保护空间环境。Veniaminov等[3]对空间碎片的监测跟踪以及清除方法进行了研究。
一般而言,在轨道倾角为82.5°~83.5°,轨道高度为900km和1 050km区域的空间碎片被认为是ADR清除的首要目标[4]。Widemann[5]列出了22种需要清除的重点威胁目标。由于一些碎片是来自于火箭上面级并且有相似的升交点赤经和轨道高度,因此怎样清除这种带有角动量的空间碎片也是研究的难点和重点。
本文对清除技术领域的关键技术方法进行了分析研究,对非合作目标进行了分类,阐述了相关技术的发展现状,叙述了清除技术的基本理论,比较了每种技术的优缺点,并且分析了每一类非合作目标所对应适用的清除技术。
1 空间碎片清除技术
空间碎片清除技术通常关注的是碎片密度较高的轨道区域,并以特定范围的尺寸为目标[6]。由于尺寸在10cm以上的碎片可能导致航天器解体等灾难性的后果,同时地面观测设备观测LEO轨道目标的限值也为10cm,因此10cm为划分研究碎片清除理论的一个典型尺寸。
近些年来,研究比较多的空间碎片清除技术为推移离轨清除技术、增阻离轨清除技术、捕获离轨清除技术以及自主离轨清除技术。图1描述了现有清除技术框架结构,表1列举了每种方法的特点及其优缺点。

图1 空间碎片清除技术框架结构
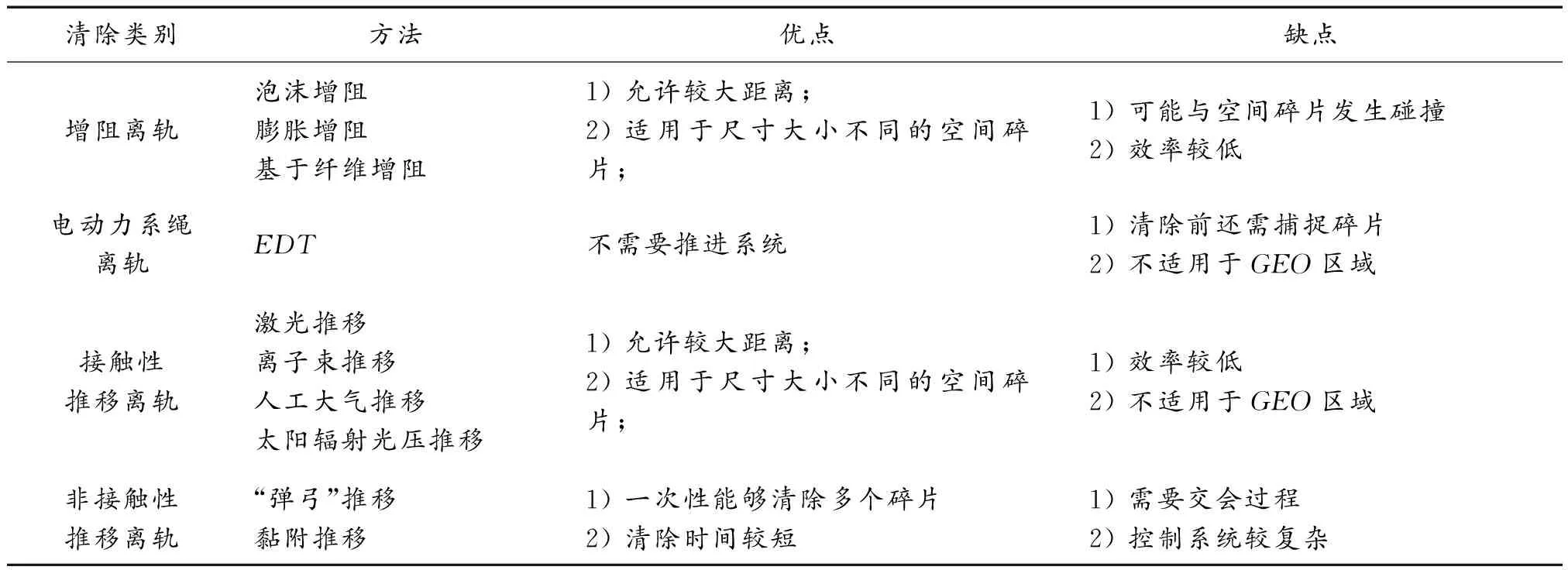
清除类别方法优点缺点增阻离轨泡沫增阻膨胀增阻基于纤维增阻1)允许较大距离;2)适用于尺寸大小不同的空间碎片;1)可能与空间碎片发生碰撞2)效率较低电动力系绳离轨EDT不需要推进系统1)清除前还需捕捉碎片2)不适用于GEO区域接触性推移离轨激光推移离子束推移人工大气推移太阳辐射光压推移1)允许较大距离;2)适用于尺寸大小不同的空间碎片;1)效率较低2)不适用于GEO区域非接触性推移离轨“弹弓”推移黏附推移1)一次性能够清除多个碎片2)清除时间较短1)需要交会过程2)控制系统较复杂
1.1增阻离轨清除技术
增阻离轨技术就是通过某种方法,增加空间碎片飞行阻力,降低飞行速度,缩短轨道运行寿命,使其再入大气层而坠毁。增阻离轨清除技术中执行清除任务的卫星(清除卫星)与空间碎片保持较大的距离,避免了清除卫星与碎片的直接接触,降低了清除困难,并且较自然阻力(大气阻力)对降低碎片寿命的作用更明显。通过增加碎片的面质比可增大其所受大气阻力,并且对于不同尺寸的碎片,需使用不同的增阻离轨方法。由于分布在低地球轨道上(LEO)的空间碎片所受大气阻力较大,因此增阻离轨清除技术适用于LEO。
1.1.1泡沫增阻离轨
当清除卫星与空间碎片交会并且绕碎片飞行时,泡沫增阻离轨方法为:清除卫星通过安装的喷射装置向空间碎片喷射泡沫,泡沫粘附在碎片上,接着泡沫包覆碎片的整个表面逐渐形成泡沫球。通过喷射泡沫,碎片的面质比由于泡沫球的低密度、大体积特性而因此增大[7]。为了将碎片有效地清除,泡沫增阻系统和电推进系统经常是联合工作的,当空间碎片成为泡沫球体后,清除卫星使用电推进系统使其脱离轨道并加快进入大气层速度,清除卫星在任务结束后也会使用电推进系统脱离轨道[8]。
1.1.2膨胀增阻离轨
膨胀增阻离轨是使用膨胀球代替了泡沫球,在此方法中,低层轨道游丝网(GossamerOrbitLoweringDevice,GOLD)是一个有效的工具。GOLD是一个非常大且轻的“气球”,当它膨胀到足够大时,开始吸附空间碎片,使得空间碎片在再入大气层过程中,弹道系数减小一到两个量级。与电推进系统脱离轨道方法比较,对于大空间碎片和已损毁的其他在轨卫星而言,GOLD方法风险更小[9]。然而,如果小空间碎片撞到了GOLD上,那么清除任务就会失败,这是碰撞增阻离轨的一大弊端。为了解决这一问题,提出了一种先使用3个膨胀机械爪抓住空间碎片再使用GOLD清除碎片的方法[10]。图2为泡沫增阻离轨和碰撞增阻离轨示意图。

图2 泡沫、膨胀增阻离轨示意图
1.1.3基于纤维的增阻离轨
此方法与上述方法类似,只是材质由泡沫变为了纤维。基于纤维的增阻离轨清除技术是将纤维从清除卫星的热源喷出,包裹并拦截住空间碎片,使空间碎片的面质比增大,从而使空间碎片再入大气层[11]。
1.2电动力绳系捕获离轨清除技术
电动力绳系(Electro-dynamicTether,EDT)捕获离轨方法最初是用作轨道转移和轨道机动[12]。它运用在地磁场运动的优势使空间碎片完成再入大气层过程。图3为电动力绳系示图和工作原理图。EDT捕获离轨方法中,电动力绳系以轨道速度在地磁场中运动,系绳上产生了电动势,电离层中的带电粒子在系绳顶端被收集起来,并从末端发射出去,形成了稳定的电流,地磁场则对系绳产生了洛伦兹力并垂直于系绳上电流的方向,由于洛伦兹力与空间碎片运动速度方向相反,使得卫星的轨道能量减少,轨道高度下降[13-14]。与利用电推进使目标离轨相比,由于电磁场强度的限制,电动力绳系无法清除轨道高度高于LEO的空间碎片,并且由于通过电动力绳系的电流较低,导致所受洛伦兹力较小,绳系不具备足够的力实现轨道的转移[15]。当使用电动力绳系进行碎片清除时,首先使用机械臂或者“鱼叉”抓取空间碎片,接着伸出系绳与碎片连接起来。EDT是由两个场发射阵列阴极(一个用作收集电子,另一个用作产生电流)和一个可控绳系构成[16]。当绳系连接到一个碎片上后,机械臂可以抓取另一个碎片。为了探究EDT的稳定性和动力调度能力,Kawamoto进行了数值仿真,建立了系绳的模型并且研究了系绳的灵活性[17]。由于空间环境的复杂,电动力系绳在椭圆轨道上并不稳定,而是处于振动状态。Zhong建立了数值仿真模型表明,通过模型耦合证明,轨道面外的振动比面内的振动对系绳的稳定性具有更大的影响,因此可以通过控制轨道面外的振动来保持系绳的稳定[18]。由于空间环境的极端条件,系绳的材质也是需要重点研究的内容[19]。

图4 地基激光推移离轨清除系统的组成
1.3非接触推移离轨清除技术
如果通过清除卫星与空间碎片的近距离接触实现推移,可能造成两者的不可控,破坏两个目标间的稳定性,本节先描述的推移离轨是非接触的推移方法,利用激光、太阳辐射、离子束等能量粒子将空间碎片推离原运行轨道,达到清除目的。非接触的推移离轨技术用时较长,目前提出的非接触推移离轨方法主要包括太阳辐射光压推移也被称为太阳帆(SolarSail)推移、离子束(IonBeam)推移、激光(Laser)推移以及人工大气(ArtificialAtmosohere)方法。
1.3.1激光推移离轨
激光推移离轨方法适用于大空间碎片(直径>10cm)和小空间碎片(直径<1mm)。激光清除一般分为烧毁和推移两种方法,推移方法是利用高能脉冲激光束照射碎片表面,降低碎片运行速度和轨道高度;烧毁是使用强大的连续波激光照射碎片,使碎片温度升高乃至升华[6]。Phipps等人在1996年首次表明被20kW、530nm且连续不断的地基高能脉冲激光束照射能将空间碎片推离原轨道。NASA和美国空军资助的ORION研究中,采用了Phipps等人的方案,该系统拥有一个高精度的监测系统以及发射激光束的地基激光清除系统。根据研究表明,该系统能够清除1 500km轨道高度上的所有碎片以及能够利用4年左右时间清除轨道高度低于1 000km、质量小于500kg的所有空间碎片[20]。LODR系统(LaserOrbitalDebrisRemoval)基于ORION系统进行改进,它能够每8个星期将Envisat卫星推离轨道40km。该激光系统能够被装载,能够放置于赤道区域和极地区域[21]。当激光照射到碎片表面上时,碎片的行为受激光束形状影响,Liedahl研究了不同的喷射形状如圆筒形、球形等对碎片行为的影响[22]。图4为地基激光推移离轨清除系统的组成。

图3 EDT示意图和工作原理图
1.3.2离子束推移离轨
离子束推移离轨(IonBeamShepherd)利用远距离发射的高能离子束与空间碎片产生作用力,降低碎片的轨道高度。由于离子束推移也是非接触的推移离轨方法,因此在清除过程中不会与碎片发生直接接触,并且远离中心线的大角度传播的等离子体非常稀少,动量可忽略不计,所以不会对空间环境造成更多污染。离子束用于产生碎片的离轨力,是离子束推移离轨清除技术的核心。离子束推移离轨方法为:首先产生离子束并将其向碎片射出,接着与空间碎片产生作用力使碎片脱离原轨道。由于离子束推移与激光推移技术一样都受到形状影响,针对该问题Bombardelli研究了球形、圆柱形碎片在受到离子束作用时的行为[23];Merino建立了IBIS(BeamInteractionSimulator)仿真模型用来分析、测试、验证IBS系统的理论设计,制定离轨计划,同时还针对推进器需求,分析了离子束特性以及离子束连接清除卫星和空间碎片时的动量转移效率[23-24]。对于GEO区域的空间碎片,Kitamura使用数值分析法以及试验,证明了6种GEO空间碎片可以被179天连续不断的离子束推移离轨[25]。图5为离子束推移离轨系统示意图。
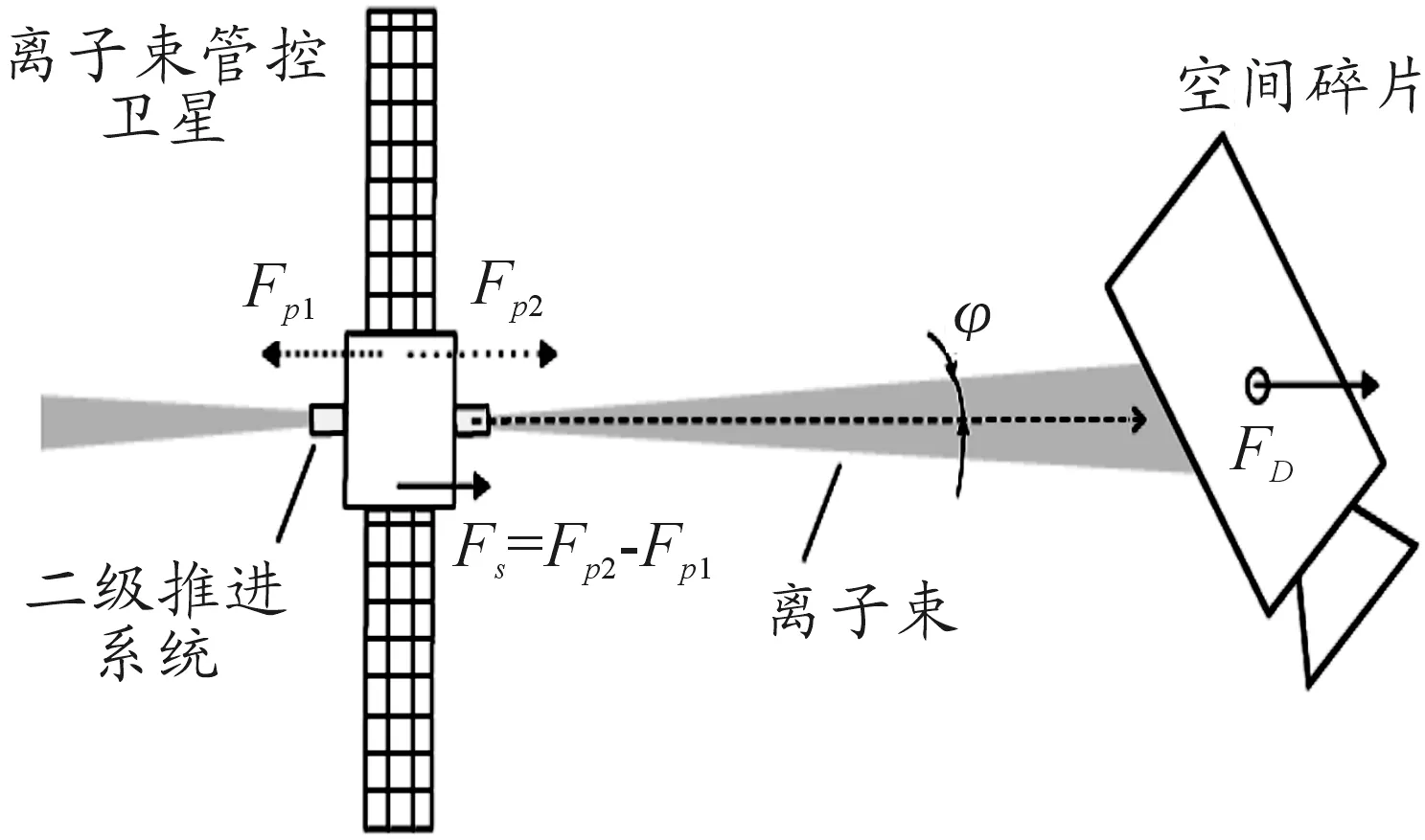
图5 离子束推移离轨示意图
1.3.3人工大气推移离轨
人工大气推移离轨是推动大气粒子向空间碎片移动,致使碎片速度减小,轨道高度降低。大气粒子可以是以羽状气态形式喷出,也可以是涡流式,但喷射方向是朝向碎片方向[26]。Kofford设计出由一个点火装置和易燃推进剂构成的人工大气传输系统[27]。为了使空间碎片再入大气层,在空间碎片周围如何产生足够密度的瞬时气态云也是需要讨论的内容,文献[28]对此进行了研究。由于大气粒子不会对卫星造成损害,在接触碎片之后也会进入大气层,所以人工大气推移离轨技术不会对空间环境造成污染,该方法也被认为是比较有发展前景的空间碎片清除技术之一[29]。
1.3.4太阳辐射光压推移离轨
太阳辐射光压推移离轨技术是在2010年由JAXA首次验证的[30]。当某些卫星的推进系统失效或者推进剂不足以使卫星完成再入大气层过程,而所装载或者附着的太阳帆控制系统仍正常时,太阳光压推移离轨方法就可以用于清除这些卫星。当目标的太阳帆被太阳光照射时,太阳光光子持续不断地撞击太阳帆,太阳帆反射太阳光光子产生推力,随着力的不断累积,空间碎片就能被推移出原轨。当空间碎片沿着轨道运行并远离太阳时,卫星轨道的长半轴a会增大,反之则会减小,在一个轨道周期完成时,长半轴的净变为零。根据上述变化,可以在卫星处于轨道上某个合适的点时,旋转太阳帆获得太阳辐射光压,使轨道降低。Borja在研究中表明,如果要利用太阳光压方法将一颗地球同步卫星推移到轨高235km的新轨道,用时不会超过5.8年[31]。然而该方法的缺点是高度依赖太阳帆控制的准确性,因此Lucking针对该缺点提出了利用太阳光压、大气阻力和地球扁率共同作用来进行清除工作[32]。由于大气密度的影响,太阳辐射光压方法适用于轨道高度高于750km轨道处的卫星。Macdonald在研究中表明,太阳辐射光压推移离轨技术对极轨道碎片的清除效果比对赤道轨道碎片的清除效果要好[33]。Johnson和Young在文献[34]中对几种太阳帆推移离轨清除技术进行了详细的介绍。
1.4接触推移离轨清除技术
接触清除技术是在清除过程中,清除卫星与空间碎片直接接触从而对空间碎片产生力的作用,将空间碎片推离原轨。“弹弓”方法和黏附方法是经典的接触离轨清除技术。图6为上述两个方法的示意图。
1.4.1“弹弓”推移离轨
4S(Sling-SatSpaceSweeper)是典型的“弹弓”推移离轨清除技术工具。它是由Texas大学设计的一个可以在空间碎片清除过程中节省耗能的卫星。该卫星能够将抓取到的空间碎片朝向地球扔出,通过扔出动作获得的动量进行下一个碎片的抓取清除工作,因此可以一次性清除多个碎片[35]。4S装置有两个相连的收集器,当卫星上的吊索向空间碎片伸出时,4S接下来就会进行抓取、自旋加速、驱逐以及返回4个动作来完成清除工作。Missel针对4S清除碎片方法,建立了一个基于角动量守恒定律的数学模型[36]。文献[37]中利用遗传算法分析了4S在不同碎片间移动的机动顺序。
1.4.2黏附推移离轨
黏附推移离轨技术也是能够一次清理多个空间碎片的方法,由AstroScale提出。该方法中,一个装载着推进系统的离轨推移结构将被清除卫星释放并黏附到旋转的空间碎片上,将碎片推移出原轨道。清除卫星将配备6个上述结构,当一个离轨推移结构被释放之后,清除卫星就会转向另一个碎片,重复上述动作,由此多个空间碎片就能一次性清除。推移离轨结构的前部是一个置有硅黏附混合物的金属盘,用于与空间碎片的平坦表面进行粘附。该过程适用于旋转角速度低于0.017~0.035rad/s的空间碎片。推移离轨结构接近旋转空间碎片的两种典型方法为:① 沿着碎片的旋转轴;② 垂直于碎片的旋转轴。但无论使用哪种方法,在黏附碎片前,结构与碎片的高度必须同步[38]。
2 非合作目标分析
各国的航天任务包括卫星发射、空间站建立、轨道运输等,空间碎片清除任务也是航天任务的一种并且与轨道服务任务相似。然而大多轨道服务任务的目标都为合作目标,空间碎片清除任务操作的对象却是非合作性目标,包括火箭上面级、已失效的卫星以及由于卫星碰撞或解体而产生的残骸等等。由于它们都是非合作性目标,因此清除卫星并不能获得碎片的详细信息,而不同的清除技术适用于大小、形状、轨道区域不同的碎片,所以空间碎片清除任务显得更加复杂和困难。因此为了有效、合理地清除空间碎片,针对不同碎片制定不同清除任务是非常重要的。
本节基于非合作目标的物理特性、特点是否已知来对其进行分类。分类结果如表2,在表中总共有4类非合作目标,通过对每一类目标的分析制定清除计划,才能够有效地实施清除任务。

图6 “弹弓”、黏附推移离轨示意图
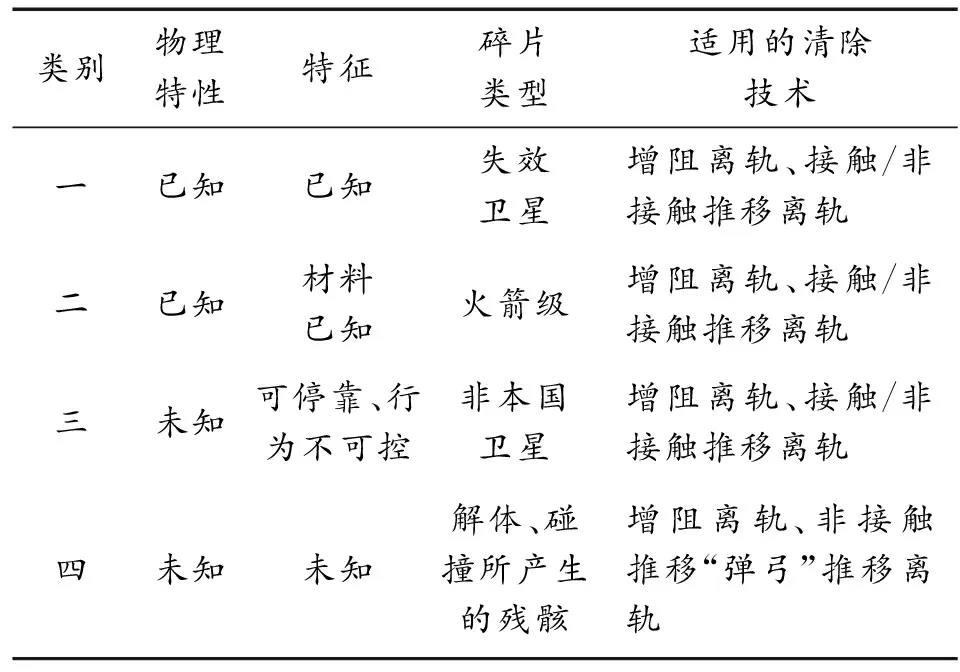
类别物理特性特征碎片类型适用的清除技术一已知已知失效卫星增阻离轨、接触/非接触推移离轨二已知材料已知火箭级增阻离轨、接触/非接触推移离轨三未知可停靠、行为不可控非本国卫星增阻离轨、接触/非接触推移离轨四未知未知解体、碰撞所产生的残骸增阻离轨、非接触推移“弹弓”推移离轨
对于类别一的目标,由于是失效卫星,可以在进行捕捉后使用电动力系绳使其离轨,如果卫星所装载或附着的太阳帆控制没有失效,则可以用太阳辐射光压推移离轨技术将其推出原轨;对于类别四的目标,由于碎片物理特性和碎片特征都是未知的,所以在没有进行捕捉的前提下,使用增阻离轨或者是“弹弓”方法等。
3 结语
由于受限于当今的技术条件,空间碎片清除技术虽然原理可行但却无法真正实施,空间环境的安全威胁仍将越来越大。在今后的研究中,更多有效的空间碎片清除技术方法会被提出、分析和实践,对每一种方法如何进行、受力特点、操作对象等内容也会进行更加详细的讨论,对于非合作目标分类和决定对应清除方法的依据也会更加细致。相信空间碎片清除技术能够在将来为空间安全、航天任务安全作出重要的贡献。
[1]KESSLERDJ,COUR-PALAISBG.Collisionfrequencyofartificialsatellites:Thecreationofadebrisbelt[J].JournalofGeophysicalResearch:SpacePhysics,1978,83(A6):2637-2646.
[2]王国语.空间碎片国际机制发展趋势分析[J].航天器环境工程,2015(2):147-152.
[3]VENIAMINOVSS,CHERVONOVAM.Kosmicheskiimusor-ugrozachelovechestvu[J].SpaceDebris:ThreattoHumanity),Moscow:InstituteofSpaceResearchofRussianAcademyofSciences,2012:192.
[4]BONNALC,RUAULTJM,DESJEANMC.Activedebrisremoval:Recentprogressandcurrenttrends[J].ActaAstronautica,2013,85:51-60.
[5]WIEDEMANNC,FLEGELM,MOCKELM.Activespacedebrisremoval,in:DeutscherLuft-undRaumfahrtKongress[Z].Berlin,Germany,2012.
[6]李怡勇,王卫杰,李智,等.空间碎片清除[M].北京:国防工业出版社,2014.
[7]PERGOLAP,RUGGIEROA,ANDRENUCCIM,etal.Expandingfoamapplicationforactivespacedebrisremovalsystems[C]//Proceedings,62ndInternationalAstronauticalCongressIAC11,IAC-11A.2011,6.
[8]PERGOLAP,RUGGIEROA,ANDRENUCCIM,etal.Low-thrustMissionsforExpandingFoamSpaceDebrisRemoval[C]//InternationalElectricPropulsionConference.2011.
[9]NOCKKT,GATESKL,AARONKM,etal.GossamerOrbitLoweringDevice(GOLD)forsafeandefficientde-orbit[C]//AIAAAstrodynamicsSpecialistsConference.2010.
[10]ROBINSONEY.Spacecraftforremovalofspaceorbitaldebris[P].U.S.Patent:6,655,637,2003-12-2.
[11]WRIGHTRJ.Orbitaldebrismitigationsystemandmethod[P].U.S.Patent:US8567725,2013-05-13.
[12]WILLIAMSP.OptimalOrbitTransferwithElectrodynamicTether[J].JournalofGuidanceControl&Dynamics,2005,28(2):369-371.
[13]ESTESRD,LORENZINIEC,SANMART-EGRAVEJ,etal.BareTethersforElectrodynamicSpacecraftPropulsion[J].JournalofSpacecraft&Rockets,2000,37(2):205-211.
[14]NRL.NRLscientistsproposemitigationconceptofLEOdebris[EB/OL].[2012-06-22].http://www.nrl.navy.mil/media/news-releases/2012/nrl-scientists-research-new-technique-clean-leo-debris.
[15]TRAGESSERSG,SANH.OrbitalManeuveringwithElectrodynamicTethers[J].JournalofGuidanceControl&Dynamics,2003,26(5):805-810.
[16]NISHIDASI,KAWAMOTOS,OKAWAY,etal.Spacedebrisremovalsystemusingasmallsatellite[J].ActaAstronautica,2009,65(1/2):95-102.
[17]KAWAMOTOS,MAKIDAT,SASAKIF,etal.Precisenumericalsimulationsofelectrodynamictethersforanactivedebrisremovalsystem[J].ActaAstronautica,2006,59(1):139-148.
[18]ZHONGR,ZHUZH.Long-TermLibrationDynamicsandStabilityAnalysisofElectrodynamicTethersinSpacecraftDeorbit[J].JournalofAerospaceEngineering,2012,27(5):04014020.
[19]DONGX,LIY,ZHANGZ,etal.Researchonthematerialandstructureofspaceelectrodynamictether[C]//40thCOSPARScientificAssembly.Moscow,Russia,2014.
[20]PHIPPSCR,ALBRECHTG,FRIEDMANH,etal.ORION:Clearingnear-Earthspacedebrisusinga20-kW,530-nm,Earth-based,repetitivelypulsedlaser[J].Laser&ParticleBeams,1996,14(1):1-44.
[21]PHIPPSCR.Alaser-opticalsystemtore-enterorlowerlowEarthorbitspacedebris[J].ActaAstronautica,2014,93(1):418-429.
[22]LIEDAHLDA,RUBENCHIKA,LIBBYSB,etal.Pulsedlaserinteractionswithspacedebris:Targetshapeeffects[J].AdvancesinSpaceResearch,2013,52(5):895-915.
[23]AIAA.SpaceDebrisRemovalwithanIonBeamShepherdSatellite:target-plasmainteraction[C]//47thAIAA/ASME/SAE/ASEEJointPropulsionConference&Exhibit,2011.
[24]MERINOM,AHEDOE,BOMBARDELLIC,etal.Ionbeamshepherdsatelliteforspacedebrisremoval[C]//ProgressinPropulsionPhysics.EDPSciences,2013:789-802.
[25]KITAMURAS,HAYAKAWAY,KAWAMOTOS.AreorbiterforlargeGEOdebrisobjectsusingionbeamirradiation[J].ActaAstronautica,2014,94(2):725-735.
[26]GREGORYDA,MERGENJF.Spacedebrisremovalusingupperatmosphereandvortexgenerator[P].U.S.Patent:8657235B2,2014-07-15.
[27]KOFFORDA.Systemandmethodforcreatinganartificialatmospherefortheremovalofspacedebris[P].U.S.Patent20130082146A1,2013.
[28]DUNNMJ.SpaceDebrisRemoval[P].U.S.Patent:8,800,933,2014.
[29]KAUSHIKG,SHARMAM,YADAVK.SpaceDebrisEliminationTechniques[J].InternationalJournalofResearch,2014,1(10):784-787.
[30]TSUDAY,MORIO,FUNASER,etal.FlightstatusofIKAROSdeepspacesolarsaildemonstrator[J].ActaAstronautica,2011,69(s9/10):833-840.
[31]BORJAJA,TUND.DeorbitProcessUsingSolarRadiationForce[J].JournalofSpacecraft&Rockets,2006,43(3):685-687.
[32]LÜCKINGC,COLOMBOC,MCINNESCR.APassiveDe-orbitingStrategyforHighAltitudeCubeSatMissionsusingaDeployableReflectiveBalloon[C]//IaaSymposiumonSmallSatellitesforEarthObservation,2011.
[33]MACDONALDM,MCINNESCR,LüCKINGC,etal.Needsassessmentofgossamerstructuresincommunicationsplatformend-of-lifedisposal[C]//AIAAGuidance,NavigationandControlConference,2013.
[34]JOHNSONL,YOUNGR,BARNESN,etal.SolarSails:TechnologyAndDemonstrationStatus[J].InternationalJournalofAeronautical&SpaceSciences,2012,13(4):421-427.
[35]MISSELJ,MORTARID.RemovingSpaceDebrisThroughSequentialCapturesandEjections[J].JournalofGuidanceControl&Dynamics,2013,36(3):743-752.
[36]MISSELJ,MORTARID.SlingSatelliteforDebrisRemovalwithAggieSweeper[J].AdvancesintheAstronauticalSciences,2011:60-64.
[37]MISSELJ,MORTARID.PathoptimizationforSpaceSweeperwithSling-Sat:Amethodofactivespacedebrisremoval[J].AdvancesinSpaceResearch,2013,52(7):1339-1348.
[38]OKADAN.Activedebrisremovalusingcarrierandmultipledeorbitingkits[C]//3rdEuropeanWorkshoponSpaceDebrisModellingandRemendiation.2014.
(责任编辑杨继森)
AnalysisandComparisonofSpaceDebrisRemovalTechnology
HUOYu-rong,LIZhi
(AcademyofEquipmentofPLA,Beijing101416,China)
Inordertoensurethesmoothprogressofthespacemissionsandthesecurityofspacecraft,spacedebrisremovaltechnologywaspresentedanditisgrowingrichwithspaceenvironmentalpollutionmoreserious,andsomeofthetechnologyhasbeentestedontheground.Duetothespacedebrisarenon-cooperativegenerallyandnocontrollablepowerplanet,thereisnospacedebrishadbeenclearedyet.Howtoremovethespacedebriseffectivelyandreasonablythatcanavoidthecreationofnewdebrisisachallengeanddifficultyfortheremovalmethod.Theexistingremovaltechnologiesofspacedebriswereanalyzedandcomparedhere,andwedescribedtheframeworkofremovalmethods,andlistedtheadvantagesanddisadvantagesofeachtechnology,anddiscussedthetoolsofeachremovaltechnologyandsummarizedthetrendsofeachmethod.
spacedebris;debrisremoval;non-cooperativeness
2016-05-03;
2016-05-20
空间碎片清理体系与天基清理新技术研究(2015SQ704102)
霍俞蓉(1992—),女,硕士,主要从事空间碎片研究。
10.11809/scbgxb2016.09.041
format:HUOYu-rong,LIZhi.AnalysisandComparisonofSpaceDebrisRemovalTechnology[J].JournalofOrdnanceEquipmentEngineering,2016(9):181-187.
V4
A
2096-2304(2016)09-0181-07
本文引用格式:霍俞蓉,李智.空间碎片清除技术的分析与比较[J].兵器装备工程学报,2016(9):181-187.
猜你喜欢
都市人(2022年3期)2022-04-27
军民两用技术与产品(2021年10期)2021-11-25
国际太空(2021年8期)2021-11-05
大科技·百科新说(2021年1期)2021-03-29
动漫界·幼教365(中班)(2020年8期)2020-06-29
环球时报(2019-12-05)2019-12-05
科学家(2019年3期)2019-08-18
科学与财富(2016年28期)2016-10-14
太空探索(2014年4期)2014-07-19
新东方英语(2014年1期)2014-01-07
