
空间机械臂绳索式末端执行器柔顺抓捕策略研究
2016-10-19 09:24张晓东梁常春
载人航天 2016年5期
潘 冬,李 娜,张晓东,梁常春
(1.北京空间飞行器总体设计部空间智能机器人系统技术与应用北京市重点实验室,北京100094;2.北京卫星制造厂,北京100194)
空间机械臂绳索式末端执行器柔顺抓捕策略研究
潘 冬1,李 娜2,张晓东1,梁常春1
(1.北京空间飞行器总体设计部空间智能机器人系统技术与应用北京市重点实验室,北京100094;2.北京卫星制造厂,北京100194)
针对机械臂抓捕非合作目标过程碰撞冲击大易造成基体偏转或目标逃逸的问题,提出并实现了快速接近-慢速接触-速度跟踪(FA-SC-VT)的末端捕获策略,并基于建立的系统全数字仿真模型对捕获策略进行了仿真验证,结果表明FA-SC-VT捕获策略与匀速捕获策略相比,可大幅减小机械臂捕获目标过程末端产生的冲击力,并可有效解决目标捕获过程中的逃逸问题。
末端执行器;非合作目标;捕获策略;柔顺捕获
1 引言
在轨服务技术是航天技术领域当前的一个研究热点,以空间精细操作为核心的空间智能机器人技术的飞速发展为航天器在轨维修、模块更换、燃料加注、碎片清理等提供了契机,而对目标载荷的成功抓捕则是进行操作的关键。
大型空间机械臂的臂杆及关节柔性导致末端定位精度低、跟踪速度稳定性差,机械臂进行目标的捕获操作时,必然在机械臂末端引起冲击[1]。冲击不仅有可能造成机械臂损坏以及基体位姿的变化,还可能造成目标逃逸导致抓捕失败。
针对此问题,学者们对于机械臂抓捕目标的捕获策略和控制进行了众多研究,Yoshida[2-3]等提出姿态无扰零空间、自适应阻抗控制等方法,减小捕获冲击以及对基体姿态的影响,并在日本ETS-VII卫星上进行了验证;W.L.Xu[4]讨论了柔性机械臂预冲击构型对于减小抓取过程碰撞冲击的影响;Matsumoto[5]针对在轨服务航天器Hyper-OSV的抓取策略进行研究,分析了整个飞行器的构型,并对不同卫星实施抓取的策略进行了分类讨论;魏承[6-7]对基于机械臂抓取空间漂浮目标的抓取策略以及捕获后目标的转移控制进行了研究,提出了动态抓取域概念,并基于滑模控制实现对目标的软硬性抓取;谭益松[8]针对空间机械臂对运输舱的捕获问题,提出了基于Loop/Contact控制模型的捕获控制策略,试验验证了此策略可有效减小捕获过程对系统的冲击;税海涛[9]对空间机器人捕获目标过程的运动规划问题进行了研究,提出了零扰动和自适应运动规划算法。以上研究均从机械臂系统整体出发,而对于机械臂末端执行器捕获机构抓捕过程的控制研究还较少。
本文以一种具有大容差捕获能力的空间大型末端执行器(Large End Effector,LEE)为研究对象,以建立的并经试验验证的末端执行器多体系统动力学模型为基础[10],针对LEE捕获机构的捕获过程,提出了FA-SC-VT(Fast Ppproach-Slow Contact-Velocity Tracking)捕获策略,以解决机器人捕获目标过程中冲击大、易逃逸的问题。
2 末端执行器绳索捕获原理
末端执行器(LEE)由三部分组成[11-12]:捕获模块、拖动模块和锁定模块,本文主要研究捕获模块。捕获模块采用驱动组件+捕获机构的实现方案。由转动环、固定环、钢丝绳、驱动组件、视觉相机等组成,末端执行器实物见图1。

图1 末端执行器实物图Fig.1 Picture of the end-effector
柔性捕获机构的执行部件是由三根具有较大柔性的钢丝绳组成的柔性捕获环。伺服电机的输出轴经过谐波减速器和内齿轮组减速后,带动旋转环旋转。柔性钢丝绳的一端固定在固定环上,另外一端通过铰链固定在旋转环上,3根钢丝绳的两端分别在固定环和旋转环上均匀分布,且首尾相连,形成一个封闭的圆环,即为捕获环,通过旋转环旋转带动钢丝绳逐步收缩完成对目标载荷的捕获,捕获过程示意图如图2所示。

图2 绳索捕获过程示意图Fig.2 Diagram of the rope capture process
3 末端捕获策略
根据绳索式末端执行器的工作原理可知,机械臂通过捕获绳索与目标捕获杆之间接触碰撞完成对目标的软捕获,是拖动、锁紧并最终实现机械臂与目标的刚性连接操作的基础,捕获环节是大型末端执行器进行目标在轨捕获的最重要环节,但捕获过程中存在以下几方面问题有待研究:1)捕获环绳索收缩速度过慢,对相对速度偏差较大的目标进行捕获时,目标容易逃逸;2)捕获环绳索收缩速度过快,对于质量惯量大的目标则会使得机械臂和基座所受冲击过大,使得机械臂破坏或者产生较大的基体姿态偏差;3)由于机械臂空间操作过程众多因素限制,捕获目标过程时间有一定限制,需在规定时间内完成。
由以上分析可知,必须研究相应的捕获策略,对末端执行器绳索捕获过程加以控制,以求既可以提高捕获的成功率(防止目标逃逸),又可以减小捕获过程中对机械臂末端的冲击。
3.1 FA-SC-VT捕获策略
通过对捕获过程分析制定如下的捕获策略:快速接近-慢速接触-速度跟踪(FA-SC-VT)。FASC-VT捕获策略将捕获过程分为三个阶段:
1)快速接近:当目标捕获杆进入捕获域后,控制末端执行器与目标适配器在捕获杆轴线方向上速度接近于0,开始捕获操作,捕获电机启动带动钢丝绳运动,收缩包围捕获杆,初始时绳索与捕获杆间未接触,绳索以最快速度收缩接近目标。
2)慢速接触:当绳索与目标间距离达到一定阈值后,捕获电机降速,以最小速度带动绳索运动,以保证绳索与捕获杆间以较小相对速度接触,减小接触碰撞力,并可防止小目标由于大冲击而逃逸,其中切换阈值的大小由捕获电机伺服控制响应速度决定,理想情况为当绳索与目标接触瞬间速度刚好降为最低。
3)速度跟踪:通过监视末端力传感器以确定绳索与捕获杆间相接触,并根据末端力传感器测量力信号对捕获电机进行速度补偿控制,以保证绳索跟踪目标捕获杆运动,直至收缩到位完成捕获,目标无法逃逸,实现目标的软捕获。
根据上述捕获策略,捕获阶段分区如图3所示:

图3 捕获阶段分区Fig.3 Capture phase partition
图中QC为捕获绳索与捕获杆潜在接触点,r为捕获接触点到绳索捕获中心的距离,R为末端绳索等效捕获域半径,d为设定的变速距离阈值。而实现此捕获策略的关键,是如何根据已知条件确定三个阶段的切换时间。
3.2 捕获策略参数求取
3.2.1 捕获容差定义
捕获容差用来表征机械臂初定位后空间捕获目标与末端执行器的捕获环之间的相对位姿关系。末端执行器抓捕坐标系∑e定义见图4,坐标系∑e的原点oe位于末端执行器捕获环上端面中心,ze方向垂直于端面向外;xe在捕获环平面内指向相机安装方向,ye由右手定则确定。目标适配器的目标坐标系为∑t,在末端执行器捕获锁紧目标适配器的情况下,坐标系∑t和∑e重合,坐标原点Ot位于目标适配器底面中心。捕获容差定义为目标适配器的目标坐标系为∑t相对于末端执行器抓捕坐标系∑e位姿,分别是Δx、Δy、Δz、Δφ、Δψ,当机械臂完成对目标的跟踪后,目标适配器已进入末端执行器的捕获域,此时可通过视觉相机测量确定捕获容差具体数值。

图4 捕获容差定义Fig.4 Definition of the capture tolerance
其中:Δz为抓捕初始轴向捕获容差;Δx为抓捕初始x方向捕获容差;Δy为抓捕初始y方向捕获容差;Δφ为抓捕初始俯仰角捕获容差;Δψ为抓捕初始偏航角捕获容差;Δw为抓捕初始残余角速度偏差;Δv为抓捕初始残余速度偏差;R为抓捕初始捕获环半径;L为捕获杆长度;QC为捕获绳索与捕获杆接触点;QE为捕获杆末端点;QP为目标坐标系原点在捕获环上端面内投影。
3.2.2 捕获平面内捕获杆位置计算
根据捕获容差的定义,设捕获接触点到目标坐标系原点Ot距离为l,则接触点QC在目标坐标系∑
t中齐次坐标表示为式(1):

末端执行器与目标间存在捕获容差Δx、Δy、Δz、Δφ、Δψ后,捕获接触点QC在末端抓捕坐标系中表示为式(2):


经变换后得基于捕获容差的齐次变换矩阵为式(4):
则捕获接触点QC在末端抓捕坐标系中表示为式(5):

且根据实际情况,捕获接触点位于捕获平面内,则可知点QC在末端抓捕坐标系中沿z轴坐标为0,则可得到式(6):

则捕获接触点在末端抓捕坐标系中表示为式(7):

由此可知捕获接触点到捕获环中心距离如式(8):

3.2.3 末端绳索捕获环包络半径计算
根据绳索式末端执行器捕获机构工作原理,捕获环是由3根钢丝绳组成的网状捕获机构,由于钢丝绳具有一定的柔性,其挠度会在抓取过程中发生变化,因此,捕获环包络不是严格的圆形,捕获环的包络半径R为捕获模块转动环角位移的非线性函数,如图5所示。现假设钢丝绳随转动环转动时保持圆弧状,且存在内切圆,本文通过求取内切圆半径作为末端绳索捕获环的等效包络半径。
以AA′段钢丝绳为例,初始状态时点A′与点B重合,顺时针旋转,由于钢丝绳具有柔性,圆弧AA′的曲率随着A′的移动而变化,假定某一时刻,转动环转过角度θ,此时圆弧AA′的圆心为o,圆心角为α,半径为lOA,圆弧AA′的长度为LAA′,根据圆弧与弦长关系,可得到式(9):


图5 绳索等效包络半径Fig.5 Equivalent envelope radius of the rope
通过式(9)可以求得圆心角α的数值解,且根据图5中几何关系,有式(10)~(12)成立:

联立式(9)~(12),可得到末端绳索捕获环包络半径R的数值解。
3.3 捕获过程控制
捕获过程采用图6所示分层控制策略,上层为决策层控制,根据绳索与捕获杆之间相对距离进行捕获阶段控制,底层为捕获环速度控制,根据末端力传感器信号进行速度补偿控制,可同时实现在自由空间的速度控制和约束空间的力控制,该捕获控制策略可以将反馈的力信号转换为速度修正量,使末端捕获绳索像弹簧一样工作,以降低捕获绳索与目标间的瞬时接触力,使捕获过程更加柔顺。
3.4 捕获策略仿真验证
为了验证文中捕获策略的有效性,以文献[10]建立的末端捕获动力学模型为对象,与传统捕获环匀速收缩控制策略进行对比分析。初始捕获容差Δx为100 mm,其余为0。仿真结果如图7~11:

图6 捕获控制框图Fig.6 Block diagram of capture control
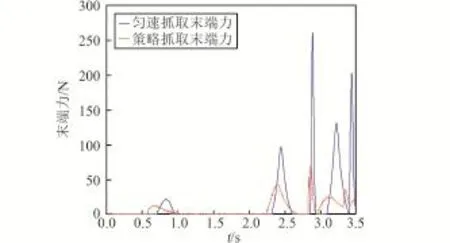
图7 末端冲击力(grid on)Fig.7 End force
图7为FA-SC-VT捕获与匀速捕获过程中对机械臂末端产生的冲击力,由图中可明显看出,在相同时间内完成捕获操作,FA-SC-VT捕获可大幅减小对末端的冲击力,最大幅值对比缩减了4倍。

图8 捕获环速度(grid on)Fig.8 Speed of the capture ring
图8、9分别为两种捕获策略下转动环转速曲线与角位移曲线,在FA-SC-VT捕获策略下转动环速度与转角分为明显的三段,如图所示,分别为快速接近段(0~0.2 s)、慢速接触段(0.2~0.4 s)以及速度跟踪段(0.4~3.5 s);通过与图7对比可知,当绳索与捕获杆接触时,通过末端力的速度补偿控制,转动环转动速度降低,冲击力减小;当目标捕获杆脱离绳索后,转动环加速,追赶捕获杆,既可防止目标逃逸,又可缩短捕获时间;在捕获终止时刻3.5 s时两种捕获策略下的转动环角位移相同,说明在捕获时间内绳索均收缩到位,软捕获成功完成。
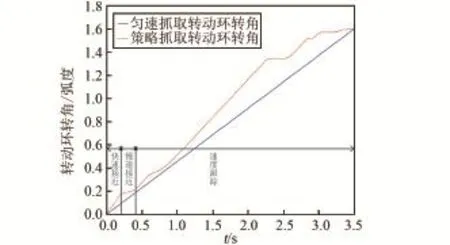
图9 捕获环转角(grid on)Fig.9 Angle displacement of the rotation ring

图10 目标质心移动速度(grid on)Fig.10 Velocity of the target centroid

图11 目标质心线位移(grid on)Fig.11 Displacement of the target centroid
图10、11分别为捕获目标质心运动的线速度和线位移曲线,FA-SC-VT策略捕获时,目标所受冲击力小,运动速度慢,且与绳索间的反复碰撞冲击频率低,与传统控制中阶跃信号跟踪响应曲线相似,超调缩小,稳定时间缩短。通过以上分析可知,文中提出的FA-SC-VT捕获策略与传统匀速捕获相比可有效减小碰撞冲击力,并防止目标逃逸。
4 结论
FA-SC-VT捕获策略相对于传统匀速捕获策略可有效减小目标与机械臂间的碰撞冲击力幅值和碰撞频率,并可在更短的时间内成功完成捕获任务,对于保证捕获过程的安全和提高捕获成功率具有相当的优势。并且本文虽然仅是针对绳索式末端执行器的研究,但文中方法还可扩展应用到两指或者三指型等不同形式的末端执行机构的抓捕控制中(将手指构成的抓取域与绳索构型的捕获域等效),具有较大的工程应用价值。
(References)
[1]Dong P,Yang Z,Yue Z,et al.Dynamic modeling and analysis of space manipulator considering the flexible of joint and link[J].Advanced Materials Research,2013,823(10):270-275.
[2]Yoshida K,Hashizume K,Abiko S.Zero reaction maneuver:flight validation with ETS-VII space robot and extension to kinematically redundant arm[C]//Robotics and Automation,2001.Proceedings 2001 ICRA.IEEE International Conference on.IEEE,2001,1:441-446.
[3]Nakanishi H,Yoshida K.Impedance control for free-flying space robots-basic equations and applications[C]//2006 IEEE/RSJ International Conference on Intelligent Robots and Systems.IEEE,2006:3137-3142.
[4]Xu W L,Yue S.Pre-posed configuration of flexible redundant robot manipulators for impact vibration alleviating[J].IEEE Transactions on Industrial Electronics,2004,51(1):195-200.
[5]Matsumoto S,Ohkami Y,Wakabayashi Y,et al.Satellite capturing strategy using agile orbital servicing vehicle,Hyper-OSV[C]//Robotics and Automation,2002.Proceedings.ICRA′02.IEEE International Conference on.IEEE,2002,3:2309-2314.
[6]Cheng W,Tianxi L,Yang Z.Grasping strategy in space robot capturing floating target[J].Chinese Journal of Aeronautics,2010,23(5):591-598.
[7]魏承,赵阳,田浩.空间机器人捕获漂浮目标的抓取控制[J].航空学报,2010,31(3):632-637.Cheng W,Yang Z,Hao T.Grasping Control of space robot for capturing floating target[J].ACTA Aeronautica Et Astronautica Sinica,2010,31(3):632-637.(in Chinese)
[8]谭益松,刘伊威,刘宏,等.大型空间末端执行器在轨操作运输舱策略[J].机械工程学报,2011,47(3):109-115.Yisong T,Yiwei L,Hong L,et al.Transfer vehicle cargo manipulating strategy in orbit using large-scale space end-effector[J].Journal of Mechanical Engineering,2011,47(3):109-115.(in Chinese)
[9]税海涛.空间机器人目标捕获的运动规划研究[D].长沙:国防科学技术大学,2010.Haitao S.Motion Planning of Space Robot Capture Target[D].Changsha:National University of Defense Technology,2010.(in Chinese)
[10]潘冬,魏承,田浩,等.空间大型末端执行器捕获动力学与实验研究[J].宇航学报,2014,35(10):1120-1126.Dong P,Cheng W,Hao T,et al.Capturing dynamics and experiment of the space large end effector[J].Journal of Astronautics,2014,35(10):1120-1126.(in Chinese)
[11]介党阳,倪风雷,谭益松,等.基于分布式控制系统的空间大型末端执行器抓捕策略[J].机器人,2011,33(4):434-439.Dangyang J,Fenglei N,Yisong T,et al.Capture strategy based on a distributed control system for a large-scale space end-effector[J].Robot,2011,33(4):434-439.(in Chinese)
[12]谭益松,刘伊威,刘宏,等.大型空间末端执行器在轨操作运输舱策略[J].机械工程学报,2011,47(3):109-115.Yisong T,Yinwei L,Hong L,et al.Transfer vehicle cargo manipulating strategy in orbit using large-scale space end-effector[J].Journal of Mechanical Engineering,2011,47(3):109-115.(in Chinese)
Study on Flexible Capture Strategy of Rope End Effector in Space Manipulator
PAN Dong1,LI Na2,ZHANG Xiaodong1,LIANG Changchun1
(1.The Beijing Key Laboratory of Intelligent Space Robotic Systems Technology and Applications of Institute of Spacecraft System Engineering,Beijing 100094,China;2.Beijing Spacecraft Manufacturing Factory,Beijing 100194,China)
Successful target capturing is the key to the on-orbit servicing such as the large structure assembly,satellite maintenance and refueling.The excessive impact force when capturing the noncooperative target by the manipulator may result in the attitude deviation of the base and even lead to the target escape.Accordingly,the fast approach-slow contact-velocity tracking(FA-SC-VT)end capture strategy was proposed and realized for the target capturing.Based on the capture dynamic model,the simulation analysis was carried out.The results showed that compared with the traditional uniform capture strategy,the FA-SC-VT capture strategy reduced the impact force generated at the end of manipulator significantly and solved the escape problem efficiently for light weight target.
end effector;non-cooperative target;capture strategy;flexible capture
V423.7
A
1674-5825(2016)05-0564-06
2015-11-06;
2016-08-10
国家自然科学基金(61573058)
潘冬(1984-),男,博士,工程师,研究方向为空间智能机械计算与控制。E-mail:pan_dong501@163.com
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
汽车实用技术(2022年15期)2022-08-19
科技与创新(2022年13期)2022-07-14
客联(2022年3期)2022-05-31
散文诗世界(2022年1期)2022-01-13
汽车维修技师(2019年2期)2019-08-23
孩子(2019年7期)2019-07-29
当代陕西(2019年10期)2019-06-03
中国科技纵横(2016年10期)2016-12-01
