
基于嵌入式的视觉跟踪系统的设计与实现
2016-10-18 07:48:08董慧文余必成黄海涛司马鑫
现代计算机 2016年16期
董慧文,余必成,黄海涛,司马鑫
(南京工程学院计算机工程学院,南京211167)
基于嵌入式的视觉跟踪系统的设计与实现
董慧文,余必成,黄海涛,司马鑫
(南京工程学院计算机工程学院,南京211167)
视觉跟踪在工业中有着广泛的应用,基于嵌入式的视觉跟踪系统因使用灵活方便而成为研究的热点。经过对目标跟踪理论基础的研究,给出基于嵌入式技术的目标跟踪系统的软硬件详细设计和实现过程,并基于实现的视觉跟踪进行实例研究,实验结果证明所研究内容的实用性。
视觉跟踪;嵌入式系统;目标跟踪;计算机视觉
0 引言
随着计算机视觉技术的迅猛发展,以实时采集到的图像序列为基础,通过图像处理的方法对图像中的运动目标进行提取、识别和跟踪,获取运动目标的位置和参数等信息,并进一步实现对运动目标的理解和分析,这样的视觉跟踪技术逐渐在军事、工业以及农业生产中得到广泛的应用,成为人们研究的热点。因此,视觉跟踪系统的设计与实现是计算机领域的重要研究课题之一。
当前关于视觉跟踪技术的研究一般是采用PC作为处理平台展开的,但是基于PC平台实现的视觉跟踪系统往往因体积过大、携带不方便、功耗过高等缺点,难以在特定环境中得到广泛应用,这限制了视觉跟踪系统的应用范围。基于嵌入式系统的视觉跟踪系统因结构小巧、使用灵活收到人们的欢迎。因此,本文研究嵌入式视觉跟踪系统的理论模型,给出系统软硬件设计和实现的详细过程,并以实现的系统运行为基础,开展实例实验研究,实验结果表明,本文研究的嵌入式视觉跟踪系统具有一定的工程实用价值,对基于嵌入式的视觉跟踪系统的研究有重要的参考意义。
1 嵌入式视觉系统的设计与实现
基于嵌入式的视觉跟踪系统主要是使用一个基于嵌入式的可移动图像采集与处理平台,实现实时图像中运动物体的目标识别和目标跟踪。视觉跟踪系统以ARM芯片作为系统的硬件处理器,以OpenCV图像处理开发库作为序列图像处理工作,通过Linux操作系统的移植、设备驱动程序的开发进行实现。
视觉跟踪系统实现的关键是目标物体的跟踪策略,实现的过程中,目标对象使用其对应的颜色直方图进行描述,通过直方图统计目标对象灰度级的分布情况,把目标看成中心为x0的矩形区域,假设椭圆的半径为h,矩形区域内的每个为点{xi},i=1,2,…,n,对应直方图颜色级的索引标识为b(xi),那么带空间位置信息的加权直方图即是:给每个点赋予权值,权值大小根据离中心点y的远近用高斯核函数调节。目标跟踪过程就等价为直方图匹配,假设q为当前帧中对象的已知直方图模板,p(y)为表示为以点y为中心的候选区域,直方图匹配的目标就是寻找一个候选区域,使内部的直方图描述和已知模板q相似。如果上一帧的跟踪结果为y0,那么当前帧的初始直方图可以计算得到。把候选区域的直方图看成以中心点y为变量的一个函数,如式(1)所示:

式(1)中前一项为确定值,因此可以用MeanShift求解后一项的最大值即可。
硬件平台方面,研究的视觉跟踪系统除了能够实现多进程调度,还要能够对图像进行实时处理,因此支持内存管理单元MMU的、具有较高频率的ARM核非常关键,系统选择基于ARM920T内核的S3C2440芯片为硬件平台,其具有全性能的MMU、指令和数据Cache以及高速ARBA总线接口。S3C2440提供了一套完整的通用系统外围设备,极大降低了系统消耗,并且其完整的功能模块,提高了配置的效率。
软件平台方面,为了保证系统的快捷性和灵活性,研究中使用嵌入式系统进行管理。嵌入式系统除了具有一般操作系统任务调度、同步机制、中断处理、文件等功能外,还具有可装卸、强实时、可移植、强稳定性、固化代码等优势。其中Linux操作系统由于其突出系统稳定、功能强大、支持多种硬件平台、应用软件多、简单易用等得到了广泛应用。因此,本文选用嵌入式Linux作为视觉跟踪系统的操作系统。视觉跟踪系统的数字图像处理部分采用跨平台OpenCV视觉处理库,其图像处理和计算机视觉相关模块,可以高效实现系统中目标对象的图像处理、结构分析、视觉识别和提取。
系统的机械部分主要是由装有舵机和直流电机的四轮型车底座构成。舵机和直流电机都由PWM波控制,舵机位于车的前部控制转向,直流电机位于车的尾部控制前进和后退。电机驱动部分则由两个并联的电路H-桥MC33886构成,PWM信号氛围两路,一路直接输入,另一路则反向后输入。如果PWM波的占空比高于50%时,电机朝一个方向转,如果占空比低于50%时,电机朝另一个方向转,以此在程序中实现视觉跟踪系统中模型车的前进和后退,电路板机械部分设计如图1所示:
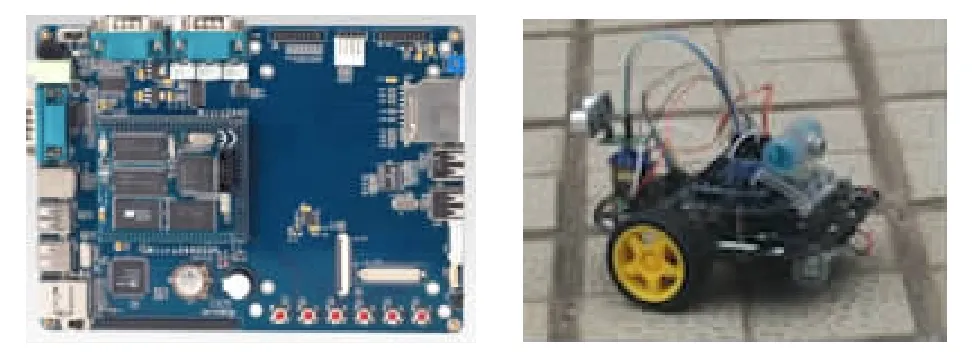
图1 视觉跟踪系统电路板和机械部分实现
2 实验结果演示
通过软硬件平台的设计及视觉图像处理与跟踪功能的实现,该系统有效实现了目标对象的视觉跟踪。以人工移动的不同颜色物体为例,在电机驱动下成功实现了目标跟踪,实验效果如图2所示:
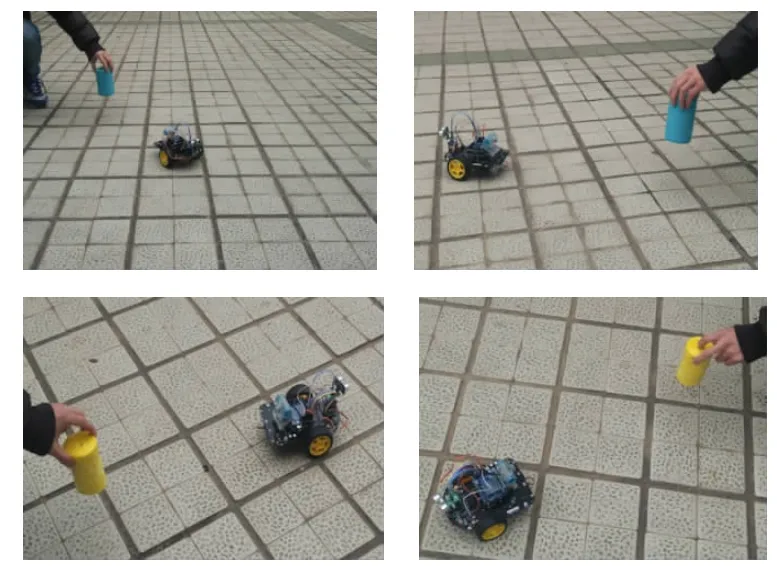
图2 视觉跟踪效果演示
3 结语
本文给出了基于嵌入式的视觉跟踪系统的详细设计过程,并基于开源图像处理库实现了视觉跟踪系统,通过实例实验演示,验证了所实现系统目标跟踪的准确性和有效性,具有一定的工程应用价值,系统的设计与实现方法对于视觉跟踪系统的研究具有重要的参考意义。
[1]鲍华,赵宇宙,张陈斌等.基于自适应分块表观模型的视觉目标跟踪[J].控制与决策,2016,31(3):448-452.
[2]吴迪,唐勇奇,万琴.基于视觉场景复杂度多特征自适应融合的目标跟踪[J].上海交通大学学报,2015,49(12):1868-1875.
[3]吴京辉,唐林波,赵保军等.基于视觉场景复杂度多特征自适应融合的目标跟踪[J].系统工程与电子技术,2015,37(2):428-435.
Design and Implementation of Vision Tracking System Based on Embedded Technique
DONG Hui-wen,YU Bi-cheng,HUANG Hai-tao,SI Ma-xin
(College of Computer Engineering,Nanjing Institute of Technology,Nanjing211167)
Vision tracking technology has applied widely in industry engineering,as its convenient application and flexible structure,the vision tracking system based on embedded technique has become a research focus.Based on the research on theoretical model for vision tracking,presents the design and implementation of software and hardware for the system,discusses the numerical experiments to validate the practical application value of the research.
Vision Tracking;Embedded System;Target Tracking;Computer Vision
1007-1423(2016)16-0036-03DOI:10.3969/j.issn.1007-1423.2016.16.011
2016-03-29
2016-06-03
江苏省大学生科技创新计划项目(No.201511276010z)
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
电子制作(2018年18期)2018-11-14 01:48:20
铁道通信信号(2018年2期)2018-04-18 12:18:23
中国公共安全(2017年8期)2017-10-13 08:12:21
中国公共安全(2017年8期)2017-10-13 08:12:20
电镀与环保(2016年3期)2017-01-20 08:15:32
计算机工程(2015年8期)2015-07-03 12:20:21
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:13
