交流牵引机车库内移车矢量控制系统研究
2016-10-15 11:31:32易吉良刘小文杨晓芳
湖南工业大学学报 2016年3期
张 帅,易吉良,程 焰,刘小文,杨晓芳
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
交流牵引机车库内移车矢量控制系统研究
张帅,易吉良,程焰,刘小文,杨晓芳
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
针对交流牵引电力机车在库内低速移动的工况,提出以机车DC 110 V蓄电池作为动力源,采用基于模糊自适应PI速度控制器的矢量控制系统。通过控制异步电机的转速,从而控制交流牵引电力机车在库内低速、稳定移动。最后,利用MATLAB/Simulink对本控制系统进行建模和仿真实验。仿真结果表明,基于模糊自适应PI速度控制器的矢量控制系统具有电压利用率高、转速误差及超调小、系统速度调节的自适应能力强等优点。
交流牵引;矢量控制;模糊PI;异步电机
0 引言
随着我国铁路建设的快速发展,交流传动电力机车将成为主流机车。交流传动电力机车在运行过程中,由于受腐蚀、振动、摩擦及自然老化等因素的影响,机车各部件会逐渐磨损,超过一定期限就会发生故障,使机车不能正常运行,因此,定期对交流传动电力机车进行保养与检修是非常重要的,可保证机车的安全运行,延长机车的使用寿命[1-2]。电力机车检修车库内没有供电牵引网。在无供电牵引的情况下,库内移动机车主要有以下两种方式。
1)利用外加辅助设备推动机车,例如使用内燃机车或者直流机车推动和谐机车行走。该方法的缺点是成本高,占用空间。
2)使用交流牵车设备,即将AC 380 V电源直接引入电力机车的移车装置上。但是当机车库内移车结束后,需要人为切断电源,收回电源线。该方法的缺点是操作繁琐,且存在安全隐患。
为了解决上述两种方法的缺陷,需要研究一种低成本、高效率、高实用性的电力机车库内移车方式。因此,本文以电力机车DC 110 V蓄电池为机车牵引电机的动力源,设计了库内移车矢量控制系统,以实现电力机车在库内低速移车。该系统先将DC 110 V通过升压电路模块升压至DC 560 V,再接入变流装置,逆变输出AC 380 V电压,再接入驱动电机的电源端,控制电机转速,从而控制机车在库内移动。本文利用MATLAB/Simulink搭建了库内移车矢量控制系统的仿真模型,并进行仿真分析。仿真结果表明,本系统是合理、可行的。
1 移车牵引系统方案
以HXD3型电力机车为例说明库内移车牵引系统的可行性。HXD3型电力机车的蓄电池组容量为170 Ah。蓄电池组的性能如下:蓄电池组能够承受的最大冲击电流为6 100 A;蓄电池组每小时的放电电流最高可达170 A;机车启动时,蓄电池组的冲击电流低于120 A;电力机车以1 km/h低速移动时,蓄电池组的电量消耗低,电流低于60 A。电力机车以1 km/h低速移动,出入库一次的行走时间约为3 min。因此,车载蓄电池组作为机车库内移车动力源,能够满足实际需求。
电力机车在库内移车的过程中,机车的部分用电设备工作会造成蓄电池组的电量显著下降。当蓄电池组的电量过低时,会导致机车无法正常工作,如蓄电池组的电压处于77 V以下,机车的受电弓将无法升起与供电网接触,控制线路的主断路器将闭合,切断供电线路与电源之间的连接。为了解决上述问题,整体方案采用超级电容组与蓄电池组进行能量分配,但能量分配策略将在另外一篇论中文进行说明。
现有的机车库内移车一般采用正弦波脉宽调制方法(sinusoidal pulse width modulation, SPWM),该方法的直流电压利用率偏低,最大只有0.5,而且会产生高次谐波、转矩脉动的问题。而采用空间矢量脉宽调制方法(space vector pulse width modulation, SVPWM),其直流电压利用率比SPWM控制方法高15%。因此,本文采用SVPWM控制方法,并引入模糊控制算法对PI速度控制器进行改进,设计了基于模糊自适应PI速度控制器的矢量控制系统。改进的PI速度控制器能够更好地适应异步电机复杂的动态特性。机车库内移车牵引系统如图1所示。

图1 整体方案结构图Fig. 1 An overall structure of the program
2 库内移车牵引系统控制策略
2.1SVPWM控制原理
异步电机的SVPWM控制,就是对电机的转速进行控制。如果要对电机的转速进行实时控制,必须要完全解耦电机的磁通电流分量和转矩电流分量。而磁通电流分量和转矩电流分量的完全解耦,可采用转子磁场定向矢量控制方法。转子磁场定向矢量控制方法的关键,是确保转子磁链与d轴的方向保持同步[1]。在同步旋转坐标系d-q下,异步电机的转子磁链r、转差角频率Δ、电磁转矩Te分别为:

式(1)~(3)中:Lm, Lr分别为电机的自感和互感;isd, isq分别为定子电流d, q轴分量;Tr为转子时间常数;P为微分算子;np为电机的极对数。
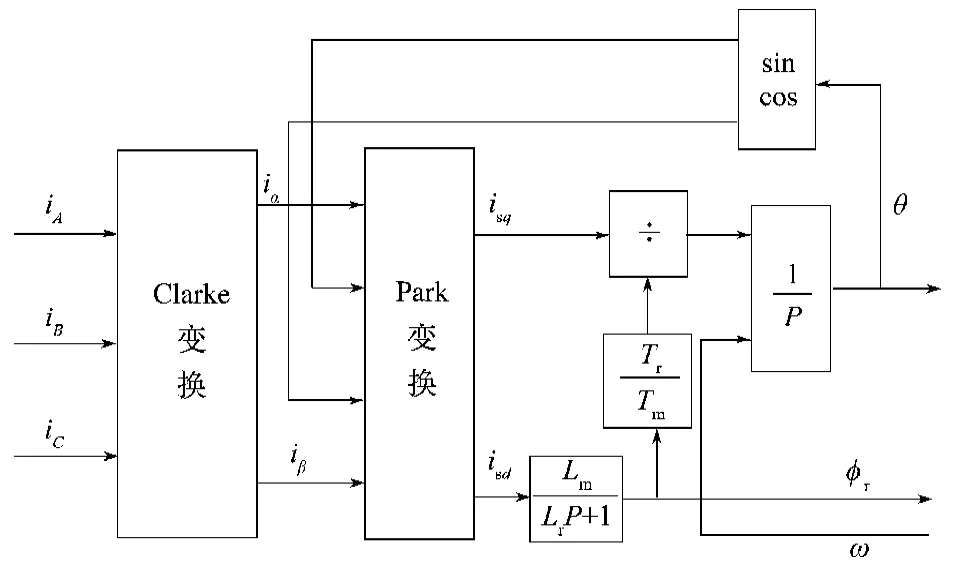
图2 计算, Δ,的结构图Fig. 2 Structure diagram of the calculation of, Δand
2.2模糊自适应PI速度控制器
结构简单、稳定性好、适应强是常规PI控制器的特性,但若要整定出一组最佳的控制器参数非常困难。如当系统参数有变动时,常规PI控制器无法及时调整控制器的参数,就会导致控制器的性能不能满足系统的要求,使整个系统出现紊乱现象。高阶次、多变量、强耦合以及非线性是异步电机的动态数学模型特征[3]。对于这种状态下,常规PI控制器整定一组最佳的PI参数极其困难,即使能够整定出最佳的,其控制效果并不能适应异步电机复杂的动态特性[4]。因此,本文采用模糊控制理论的自校正特性与常规的PI控制理论相结合的模糊自适应PI控制器[5]。该控制器的结构如图3所示,图中,nref为速度给定量,nω为电机转子实际转速。

图3 模糊自适应PI控制器的结构图Fig. 3 Structure diagram of the fuzzy adaptive PI controller
由图3可知,模糊推理模块的两个输入量,分别是电机的转速误差e和误差变化率ec,根据专家知识建立的输出修正量Δ Kp,Δ Ki与速度误差e、误差变化率ec之间的模糊规则(见参考文献[6]),推理出最优的ΔKp,ΔKi。经过推理修正的PI参数,可以适应不同时刻的转速误差e和误差变化率ec,因而控制器的适应性能与系统的稳定性都有很大提升[6]。通过式(4)~(5)可以获得整定的模糊自适应PI控制器的PI参数。

2.3基于模糊自适应PI速度控制器的矢量控制系统
在本文所设计的基于模糊自适应PI速度控制器的SVPWM控制系统中,模糊自适应PI控制器的转速环为系统外环,常规PI控制器的转矩、励磁电流环为系统内环[7]。系统结构如图4所示。
由图4可知,模糊自适应PI控制器的输入量为电机的给定转速nref与实际转速nω的差值,经ASR输出,其为转矩控制器ATR的输入量;给定磁链经计算模块得到励磁电流,其为磁链控制器APhiR的输入量[8];实测的定子电流i, i, i经Clarke变换和Park
ABC
变换输出d-q坐标系的转矩电流isd和励磁电流isq,经转子磁链计算模块算出θ,并送至坐标变换环节。分别与对应的进行差值运算,经转矩控制器、磁链控制器输出电压指令;再将得到的电压指令接入Park逆变换模块,输出静止坐标系 -下的;最后,经SVPWM模块得到可控制的电压脉冲,控制三相逆变器的开关时间和三相交流电压的幅值,从而控制异步电机的转速。
3 建模与仿真分析
3.1系统建模
在MATLAB/Simulink中,建立模糊自适应PI速度控制器的SVPWM控制系统的仿真模型。该系统中的各个仿真模块具体设计如下。
1)模糊自适应PI速度控制器的仿真模块如图5所示[6]。该模块是将电机转速的误差e和误差变化率ec通过建立的模糊规则,输出修正量ΔKp, ΔKi,对Kp,Ki进行在线整定,得到适应瞬时时刻电机动态特性的最佳参数。
2)转矩ATR控制器与磁链APhiR控制器均是带输出限幅的常规PI控制器,具有相同的结构,只是参数不同。转矩ATR控制器仿真模块,磁链APhiR控制器仿真模块分别如图6、图7所示。

图5 模糊自适应PI速度控制器仿真模块Fig. 5 Emulation modules for a fuzzy adaptive PI speed controller

图6 转矩ATR控制器仿真模块Fig. 6 Emulation modules for the torque ATR controller

图7 磁链APhiR控制器仿真模块图Fig.7 Emulation modules for the APhiR controller
3)异步电机的转差角频率Δ ω可由式(2)得到。转差角频率Δ ω与检测出的转子角频率ωr两者之和为电机实际定子频率。由相位角与定子频率之间的数学关系可得,转子磁链的相位角θ等于定子频率的积分值[8],关系式如式(6)~(7)。

由式(1)、式(3)和式(7)建立的计算磁链Phir、励磁转矩Te、转子磁链的相位角的仿真模块如图8所示。

图8 磁链观测仿真模块Fig. 8 Flux observer emulation modules
4)SVPWM模块由电压矢量扇区判定模块、扇区基本电压矢量工作时间计算模块、PWM波开关切换时间模块、SVPWM波形生成模块构成[1],如图9所示[9]。图中X, Y, Z是计算电压矢量工作时间引入的中间变量。

图9 SVPWM仿真模块Fig. 9 SVPWM emulation modules
5)矢量坐标变换是一种非常重要的数学方法,它可以将交流电机的复杂模型转换、等效为简单模型,是交流电机矢量控制的基础。根据坐标变换的关系,Park变换、Clarke变换、Park逆变换的模块结构都是一样的,只是它们的输入输出变量和Fcn函数表达式不同。Park变换的仿真模块如图10所示。

图10 Park变换模块Fig. 10 Park transformation modules
图10中,Fcn,Fcn1函数分别为:

将搭建的各个仿真子模块按相互作用关系连接起来,就构成了采用模糊自适应PI速度控制器的SVPWM控制系统[10],如图11所示。
3.2仿真结果及分析
对图11所示的系统分别采用常规PI速度控制器和模糊自适应PI速度控制器进行仿真对比。设置电机空载启动,转速达到给定值后,在t=0.8 s时,以阶跃信号的形式突加TL=200 N·m的负载,仿真时间为1.5 s。电机参数为:额定容量为560 kW,额定电压为2 750 V,额定频率为138 Hz,Rs=0.106 5,Lsα= 1.31 mH,Rr=0.066 3, Lrσ=1.93 mH,Lm=53.6 mH,转动惯量J=1.5 kg·m2,极对数np=2,转子磁链的给定值φ=0.45 Wb。机车DC 110 V蓄电池经升压模块后,为三相逆变桥、直流母线提供DC 560 V电压。
当给定转速n*=30 r/min时,两种速度控制器的速度响应对比如图12所示。当给定转速n*=100 r/min时,两种速度控制器的速度响应对比如图13所示。

图11 系统仿真模型图Fig. 11 A system emulation diagram

图12 n*=30 r/min,常规PI与模糊自适应PI仿真速度响应对比图Fig. 12 n*=30 r/min,A contrast diagram for the simulation speed responses between the conventional PI and fuzzy PI


图13 n*=100 r/min,常规PI与模糊自适应PI仿真速度响应对比图Fig. 13 n*=100 r/min,A contrast diagram for the simulation speed responses between the conventional PI and fuzzy PI
从电机转速的启动超调值、到达给定转速的时间、突加负载转速值、最终转速值以及定子电流所含谐波的成分5个方面,对采用常规PI速度控制器与模糊自适应PI速度控制器的仿真结果进行对比,分析结果如表1所示。

表1 常规PI与模糊PI控制器对比Table 1 A comparison between the controllers of the conventional PI and the fuzzy PI
由表1可以看出,采用模糊自适应PI速度控制器的调速系统具有转速超调小、稳态误差小、定子电流中含有的高次谐波少以及系统的自适应调节能力提升等优点,验证了设计方案的合理性与可行性。
4 结语
根据交流牵引电力机车库内低速移动的工况,本文以电力机车车载DC 110 V蓄电池作为动力源,设计基于模糊自适应PI速度控制器的矢量控制系统。该系统具有直流电压利用率高,转速误差及超调小,数字控制实现容易,系统速度调节的自适应能力强等优点,是一种低成本高效率的控制系统,具有很好的应用前景。
[1]高梅梅. 异步电机矢量控制变频调速系统效率优化控制研究[D]. 长沙:中南大学,2012. GAO Meimei. Research on Efficiency Optimization Control of Induction Motor Vector Control Variable Frequency Speed Regulation System[D]. Changsha:Central South University,2012.
[2]朱智勇,余世明,施金培. 基于模糊PI控制的三相异步电机Simulink建模与仿真[J]. 机电工程,2012,29(1):53-57. ZHU Zhiyong,YU Shiming,SHI Jinpei. Modeling and Simulation on Simulink for Three-Phase Asynchronous Motor Based on Fuzzy-PI Control[J]. Journal of Mechanical & Electrical Engineering,2012,29(1) :53-57.
[3]郭燚,张晓旭,李硕. 异步电机矢量控制系统模糊PI控制器设计[J]. 通信电源技术,2014,31(4) :71-74. GUO Yi,ZHANG Xiaoxu,LI Shuo. The Dssign of the Fuzzy PI Controller for the Asynchronous Motor Vector Control System[J]. Telecom Power Technology,2014,31(4) :71-74.
[4]王宝忠,薛玮珑,许林军. 基于模糊PI的异步电机矢量控制系统仿真[J]. 现代电子技术,2011,34(7) :186-192. WANG Baozhong,XUE Weilong,XU Linjun. Simulink of Asynchronous Induction Motor Vector Control System Based on Fuzzy PI[J]. Modern Electronics Technique, 2011,34(7) :186-192.
[5]朱建渠,张罡. 三相异步电机模糊控制的研究[J]. 电力电子技术,2012,46(7) :81-83. ZHU Jianqu,ZHANG Gang. Study of Fuzzy Control of Three-Phase Asynchronous Motor[J]. Power Electronics,2012,46(7) :81-83.
[6]陈爽,段国艳,王 静,等. 基于模糊自适应速度调节器的异步电机矢量控制系统研究[J]. 制造业自动化,2011,33(5) : 49-52. CHEN Shuang,DUAN Guoyan,WANG Jing,et al. The Research of Induction Motor Vector Control System Based on Fuzzy Self-Adaptive Speed Controller[J]. Manufacturing Automation,2011,33(5) :49-52.
[7]孙霞,王威,张新忠,等. 模糊自适应控制的异步电动机系统研究[J]. 煤矿机械,2013,34(1) :183-184. SUN Xia,WANG Wei,ZHANG Xinzhong,et al. Research of Mine Asynchronous Motor System Based on Fuzzy Self-Adaptive Control[J]. Coal Mine Machinery,2013,34(1) :183-184.
[8]张云红,曾成碧,吴传来,等. 模糊控制在永磁同步电机调速系统中的应用[J]. 微电机,2012,45(7) :69-73. ZHANG Yunhong,ZENG Chengbi,WU Chuanlai,et al. Speed Regulating System of Permanent Magnet Synchronous Machine Based on Fuzzy Control[J]. Micromotors,2012,45(7) :69-73.
[9]黄钦,李祥飞,李文峰,等. 改进电压模型的异步电机矢量控制系统仿真[J]. 湖南工业大学学报,2013,27(1) :53-57. HUANG Qin,LI Xiangfei,LI Wenfeng,et al. Simulation of Asynchronous Motor Vector Control System Based on Improved Voltage Model[J]. Journal of Hunan University of Technology,2013,27(1) :53-57.
[10]冯鹏辉,谭 兮,刘国营,等. 基于模型参考自适应的异步电机矢量控制系统[J]. 湖南工业大学学报,2012,26(4) :46-51. FENG Penghui,TAN Xi,LIU Guoying,et al. Vector Control of Asynchronous Motor Based on Model Reference Adaptive System[J]. Journal of Hunan University of Technology,2012,26(4) :46-51.
(责任编辑:邓彬)
On the Vector Control System for the Stall Parking of AC Traction Locomotives
ZHANG Shuai,YI Jiliang,CHENG Yan,LIU Xiaowen,YANG Xiaofang
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,Chin a)
Based on the operating mode of the stall parking of AC traction electric locomotives, a vector control system, with DC 110 V accumulator its power source, has been designed of a fuzzy self-adaptive PI speed controller. By controlling the rotational speed of the induction motor, a slow and steady movement of the AC traction locomotives has been realized in the process of stall parking. The final result of a modeling and simulation test for the control system based on MATLAB/Simulink shows that the vector control system based on the fuzzy self-adaptive PI has the following advantages: more efficient voltage utilization, less rotational speed errors and smaller overshoot, greater self-adaptive capacity for the system speed regulator, etc.
AC traction;vector control;fuzzy PI;induction motor
TM343
A
1673-9833(2016)03-0071-06
10.3969/j.issn.1673-9833.2016.03.013
2016-03-02
国家自然科学基金资助项目(61503131),湖南省教育厅科学研究基金资助项目(14C0327)
张帅(1987-),男,安徽蚌埠人,湖南工业大学硕士生,主要研究方向为现代电力电子技术,E-mail:325115875@qq.com
易吉良(1972-),男,湖南株洲人,湖南工业大学副教授,主要从事电能质量分析,数字信号处理方面的教学与研究,E-mail:yi.jiliang@163.com
猜你喜欢
制冷与空调(2022年3期)2022-08-01 02:35:20
减速顶与调速技术(2021年3期)2021-03-09 03:14:56
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
技术与市场(2020年5期)2020-05-21 00:47:06
水利规划与设计(2016年10期)2017-01-15 14:01:10
西藏科技(2015年10期)2015-09-26 12:10:27
焊接(2015年1期)2015-07-18 11:07:33
机电产品开发与创新(2014年4期)2014-03-11 16:42:22
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:10