基于STM32的智能答疑机器人设计
2016-10-14 02:37:08王春荣黄凌山熊昌炯夏尔冬郑飞杰
三明学院学报 2016年4期
王春荣,黄凌山,熊昌炯,夏尔冬,郑飞杰
(1.三明学院 机电工程学院,福建 三明 365004;2.机械现代设计制造技术福建省高校工程研究中心,福建 三明 365004;3.绿色铸锻及其高端零部件制造福建省2011协同创新中心,福建 三明 365004;4.福建省铸锻零部件工程技术研究中心,福建 三明 365004)
基于STM32的智能答疑机器人设计
王春荣1,2,3,4,黄凌山1,熊昌炯1,2,3,4,夏尔冬1,2,3,4,郑飞杰1,2,3,4
(1.三明学院 机电工程学院,福建 三明 365004;2.机械现代设计制造技术福建省高校工程研究中心,福建 三明 365004;3.绿色铸锻及其高端零部件制造福建省2011协同创新中心,福建 三明 365004;4.福建省铸锻零部件工程技术研究中心,福建 三明 365004)
研究了一种具有语音识别技术的智能机器人,以PRO/E对答疑机器人进行三维建模,STM32为机器人的控制系统核心,设计答疑机器人所需要的各个电源转换模块。答疑机器人能通过LD3320对接收到的语音进行识别处理,并根据识别结果发出相应解答以及配合一定的动作。为提高机器人的语音识别效果,利用卡尔曼算法进行降噪处理。通过实验表明,卡尔曼算法具有一定的降噪作用,该系统能移植到各种示教机器人、迎宾机器人以及智能玩具等。
机器人;STM32;语音识别
随着计算机技术的发展,人们对人工智能的开发越来越深入,其中包括各种各样的智能探测机器人、高精度室内、室外定位机器人以及工业机械手等。但是人们发现语言是人与人工智能最简单、最迅速、最直接的交流方式,语音控制[1-2]就是实现人机对话的基本方法。国内外有许多研究机构和学者对语音机器人做出了相应的研究,如国外的IBM、微软、三星等都对语音识别技术投入大量的研究经费,国内的清华大学、北京大学、中科院声学所等也对语音识别技术展开的相关的研究,如清华大学的邓侃等[3]利用神经网络算法对语音识别技术进行的研究,宋青松等[4]提出了一种对孤立语音识别降维方法,文献[5]采用动态时间规整对语音识别进行了研究等,但是将语音识别技术应用于课堂答疑机器人的研究还比较少。
因此本文设计了一种语音答疑机器人,通过提问者发出语音,从而机器人对语音做出识别,并控制机器人完成一定的动作以及发出相应的解答声音。
1 机械结构设计
利用PRO/E对答疑机器人的面部进行三维实体建模,机器人的机械本体包括眉毛、眼睛、眼睑、鼻子以及下巴等。其中眉毛具有两个自由度(旋转)、眼脸具有两自由度(水平与垂直转动)下巴具有一个自由度 (上下运动),9个自由度均以12V直流电机作为驱动控制。本文所设计的答疑机器人机械结构本体如图1所示。
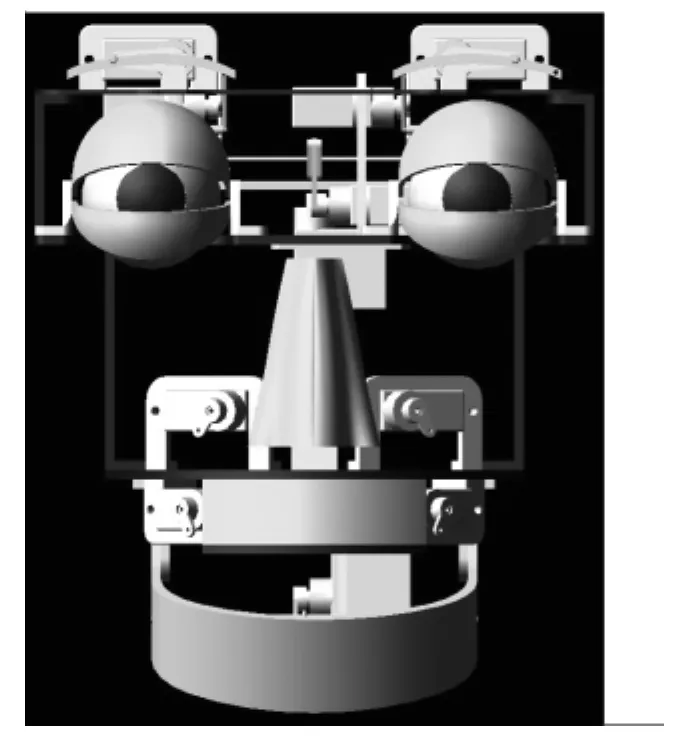
图1 答疑机器人
2 硬件控制系统设计
2.1 STM32简介
STM32F103ZET6[6-7]是一种高性能、低功耗、抗干扰能力强、运算速度快、成本低的嵌入式处理器。工作频率可达72MHz、内置Flash存储器可达512K、具有7个定时/计数器、3个USART接口、I2C接口以及SPI接口等众多资源,并且可以使用KeilC软件利用C语言进行编程,无需操作系统具有极大的方便性。STM32F103ZET6最小系统电路图,如图2所示。

图2 STM32F103ZET6最小系统
2.2控制系统原理
本文采用STM32的TIMERS产生PWM信号,用于控制眉毛、眼睛、眼睑、鼻子以及嘴巴等关节处的12V电机,实现答疑机器人的脸部表情,总体的硬件控制框图,如图3所示。
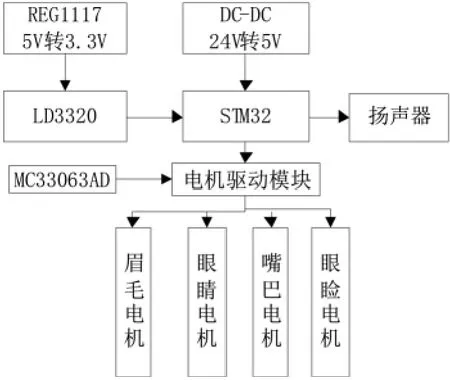
图3 硬件控制框图
2.3电源模块的设计
⑴5V电压源设计
STM32F103ZET6正常工作电压为 5 V,选择SPD10-24S05为其提供电压。SPD10-24S05的基本参数:输入电压范围:18~36 V;输出:5 V,2A;输出电压精度:+1.0%;源效应:+0.2%;负载效应:+ 0.5%;隔离电压:2500 V(普通型);开关频率:300 kHz。SPD10-24S05精度高,稳定性好,能提供稳定的工作电压。电路图如图4所示。
⑵12V电压源设计
MC33063是Motololar公司的产品。主要用做汽车电子设备的电源变换。可用做升压变换,也可用于降压变换。输入电压从5~40V,可适用于绝大多数的汽车蓄电池。输出电压由用户自己设计,几乎适用于所有的电子设备。输出电流最高可达1A。效率较高,较为理想情况下,效率可高于85%。图5为24V转12V的降压设计,提供电机正常工作所需的电压。
(3)3.3V电压源设计
REG117是一款可以输出高精度电压的三端稳压器,具有输出电流最高可达1A、过热保护、限流保护等特点,电路图如图6所示。为语音芯片LD3320提供3.3V的电压,图中的C23电容,对输入的瞬时过电流可以起到抑制作用;同理,的C29对负载的高频相应也具有一定的改善作用。

图4 24V转5V

图5 24V转125V
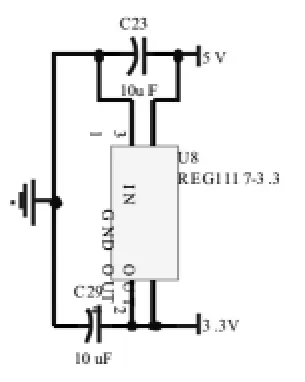
图6 5V转3.3V
(4)LD3320模块设计
LD3320[8-9]是一款功能强大的非特定人语音识别芯片,支持SPI通信与并行通信,具有高准确度、无需录音训练等优点,其电路图如图7所示。
3 软件系统设计
语音机器人的系统软件是利用KEIL编程软件编写的,KEIL能够兼容ANSI标准的C语言的编程,其使用操作方便、功能适用、技术支持性能好,它能够在Windows软件系统的平台下正常运作,编写并编制C语言代码;在工程之中能够搜集到全部的源文件,在这个平台中能够执行并实施“文件的编辑”和“工程的构筑”;能生成“hex”格式的文件下载到单片机中运行,并且可以在Proteus软件中实现仿真等特点。
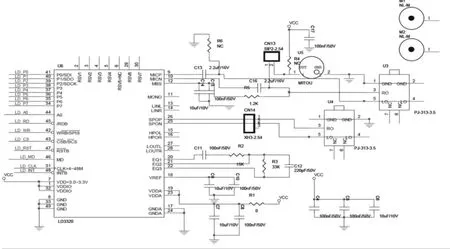
图7 LD3320控制电路
采用中断方式进行工作,程序流程为STM32初始化、LD3320初始化、采集语音信号、语音识别、根据识别信息相应中断从而产生相应的动作与应答。程序流程图,如图8所示。
4 实验分析
为了提高机器人的语音识别效率,采用了卡尔曼算法对语音进行滤波降噪处理。卡尔曼滤波算法是一种以最小均方误差来做预测,能对语音信号做线性无偏估计。提取了在安静环境下所识别的到的语音,图9所示,对其进行加噪以验证卡尔曼算法的降噪效果,如图10所示,而图11为经过卡尔曼滤波算法处理后的语音。分析实验结果可知,卡尔曼滤波算法能对语音具有一定的降噪作用,提高机器人的语音识别效果。
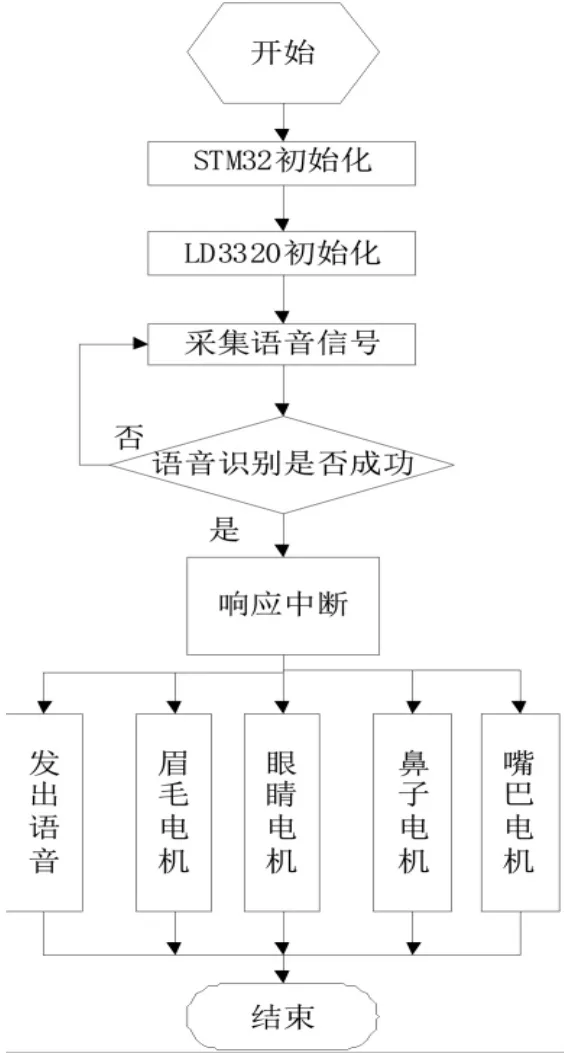
图8 程序流程图

图9 原始纯净语音
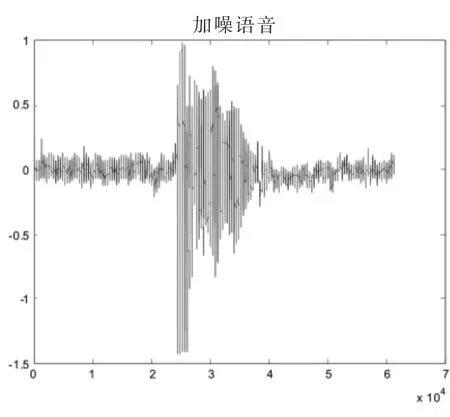
图10 加噪语音
5 结束语
基于语音机器人是当前的研究热点,将语音识别技术与课堂答疑相结合,采用PRO/E对答疑机器人进行三维建模,以STM32F103ZET6为核心控制器,设计了STM32、LD3320以及电机所需的电源转换模块,并通过软件实现机器人具有非特定的语音识别。教师可以事先把一些难题、学生比较薄弱的知识点,详细讲解录音之后存储到答疑机器人里,之后学生可以在课余时间与答疑机器人进行交流,对薄弱的知识点进一步巩固,这不仅解决了大学里下课难找到任课老师请假问题,而且还能激起学生的学习兴趣。此外,该系统具有可移植性,可以用在各种智能机器人上,因此本文所设计的语音机器人具有低成本,可以被广泛应用。
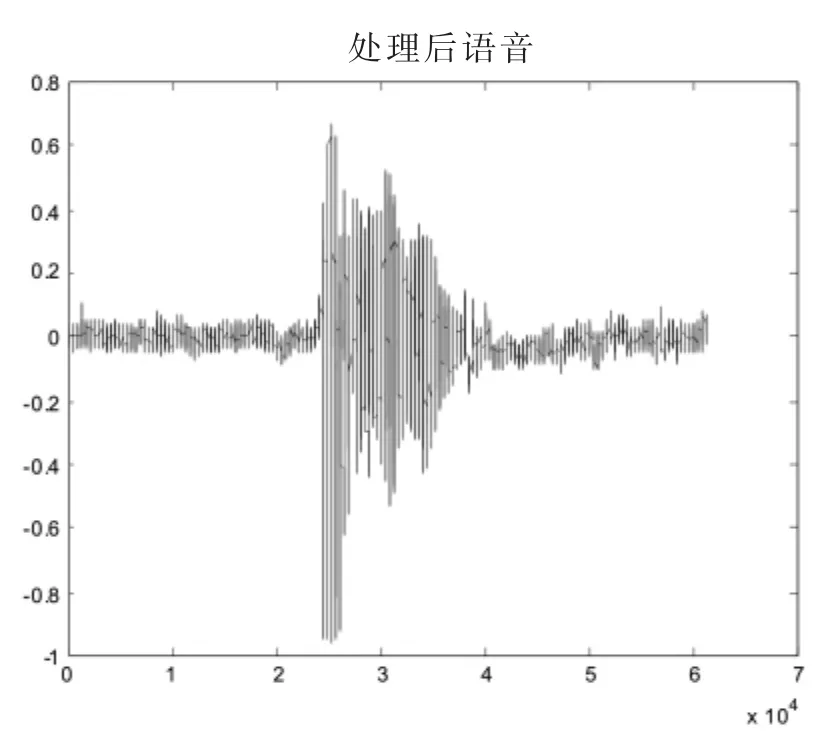
图11 滤波处理后语音
[1]张汝波,刘冠群.移动机器人语音控制技术研究与实现[J].华中科技大学学报,2013,10(41):348-351.
[2]何湘智.语音控制的应用研究[D].长沙:国防科学技术大学,2002.
[3]邓侃,欧智坚.深层神经网络语音识别自适应方法研究[J].计算机应用研究,2016(7):1-6.
[4]宋青松,田正鑫,孙文磊,等.用于孤立数字语音识别的一种组合降维方法[J].西安交通大学学报,2016(6):1-5.
[5]宋亚男,林锡海,徐荣华,等.机器人语音识别实验设计与实现[J].实验技术与管理,2013(2):36-38.
[6]饶连周,林惠川,谢金涛,等.基于STM32F103VC和CAN总线的汽车仪表系统的设计[J].三明学院学报,2014,29 (2):56-60.
[7]张旭,元学广.基于STM32电力数据采集系统的设计[J].电子测量技术2011,33(11):90-94.
[8]杜希栋,王志伟.基于 LD3320的非特定语音控制小车设计[J].信息技术,2011(1):53-55.
[9]施艳艳,于文英,杨凌霄.空调的非特定语音辨识与控制[J].河南师范大学学报(自然科学版),2015(3):51-55.
(责任编辑:朱联九)
Intelligent Voice of the Robot Design Based on STM32
WANG Chun-rong1,2,3,4,HUANG Ling-shan1,XIONG Chang-jiong1,2,3,4,XIA Er-dong1,2,3,4,ZHENG Fei-jie1,2,3,4
(1.School of Mechanical&Electronic Engineering,Sanming University,Sanming 365004,China;2.Engineering Research Center in Fujian Province University for Modern Mechanical Design and Manufacturing Technology,Sanming 365004,China;3.Collaborative Innovation Center of Green Casting-Forging Industry and High-End Parts in Fujian Province,Sanming 365004,China 4.Engineering Technology Research Center of Casting-Forging Parts Manufacturing in Fujian Province,Sanming 365004,China)
A kind of speech recognition technology robot was studied. The three-dimensional mode of answering robot was established by Proe/E and the control system was consisted of STM32. The power conversion module of answering robot was designed. According to the received speech, the corresponding solutions and a certain action are obtained by the answering robot for the questioner. In order to improve the effect of speech recognition, the Kalman algorithm was used to noise reduction processing. The experiment results show that kalman algorithm has the effect of noise reduction, which,therefore, can be transplanted into all kinds of teaching robots, robot receptionists and intelligent toys.
robot; STM32; speech recognition
TP242.6
A
1673-4343(2016)04-0067-05
10.14098/j.cn35-1288/z.2016.04.011
2016-02-23
大学生创新创业训练计划项目(201311311029);三明市科技项目(2014-G-6);福建省教育厅科技项目(JA14293);福建省教育厅科技项目(JK2015046);福建省自然科学基金项目(2016J01741)
王春荣,男,福建漳州人,讲师。主要研究方向:机器人控制技术。
猜你喜欢
巴蜀史志(2021年2期)2021-09-10 13:17:04
老年教育(老年大学)(2020年3期)2020-06-02 12:34:40
海峡姐妹(2020年2期)2020-03-03 13:36:30
海峡姐妹(2019年11期)2019-12-23 08:42:20
海峡姐妹(2018年1期)2018-04-12 06:44:32
海峡姐妹(2017年1期)2017-02-27 15:22:17
中国卫生(2016年11期)2016-11-12 13:29:20
中国卫生(2016年11期)2016-11-12 13:29:20
中国卫生(2016年11期)2016-11-12 13:29:14
福建质量管理(2016年5期)2016-02-27 10:29:33