
舰船轴频电场的轴地有源补偿技术
2016-10-13 01:28:59张安明张海鹏程峥华
中国舰船研究 2016年2期
张安明,张海鹏,程峥华
1海军驻大连船舶重工集团有限公司军事代表室,辽宁大连116005
2海军潜艇学院动力操纵系,山东青岛266042
3中国人民解放军92730部队,海南三亚572016
舰船轴频电场的轴地有源补偿技术
张安明1,张海鹏2,程峥华3
1海军驻大连船舶重工集团有限公司军事代表室,辽宁大连116005
2海军潜艇学院动力操纵系,山东青岛266042
3中国人民解放军92730部队,海南三亚572016
为了有效减少舰船轴频电场的影响,降低舰船的暴露率,在分析轴频电场产生机理和相关电学特性的基础上,提出舰船轴频电场的轴地有源补偿方法,分析轴地有源补偿系统的原理,设计系统的控制框架和功能框架。研究舰船轴地微弱信号监测与调理技术以及电场抑制系统的判断与控制技术,设计轴地有源补偿系统的驱动和功率输出模块,开展轴频电场抑制效果的模拟测试。试验结果表明:除去环境电场的影响,该系统对轴频电场的抑制能力超过75%,可以有效降低舰船轴频电场对舰船隐蔽性的影响。
轴频电场;电势补偿;电场抑制;舰船
0 引 言
舰船的腐蚀电场和阴极保护系统会在轴系中产生电流,轴系转动时,其阻抗周期性变化,产生轴频电场。轴频电场已成为显著的舰船特征信号[1],俄、美、英、加等国已在轴频电场抑制研究中取得相当成就,并已将消除舰船电场列入其舰船建造规范[2-4]。舰船轴频电场衰减规律符合麦克斯韦电磁理论,它的传播距离远,易被敌方探测到,其特征信号容易被识别并用于对舰船的探测、跟踪、定位和打击[5-7]。所以,抑制舰船轴频电场成为目前亟待解决的问题。
本文将在研究与轴频电场相关的舰船电学等效模型和电学特性的基础上,分析轴地有源补偿系统的原理,设计轴地有源补偿系统产生模块,研制舰船轴频电场的闭环实时抑制系统,并在实验室模拟舰船电场实时抑制试验,验证该技术能否有效抑制舰船的轴频电场强度,减小舰船轴频电场的影响,削弱远程探测舰船的特征信号,以增强舰船隐蔽性,提高舰船生命力。
1 舰船轴频电场特性分析
组成现代舰船的不同金属,在海水中会表现出不同的电极电位,形成腐蚀原电池,产生腐蚀电流。为提高防腐能力,舰船都会采用有源阴极保护系统[8],而有源阴极保护系统提供的直流大电流和腐蚀电流却是产生舰船电场的主要源头。
要研究舰船轴频电场特性,主要需要研究舰船轴系。舰船结构部件主要包括转轴、支承轴承、中间轴承、推力轴承、螺旋桨、滑环、电刷和轮机系统。
在舰船轴系结构的电学分析中,海水是重要的组成部分,而轮机的影响则不大。转轴上的滑环和电刷之间的接触电阻对舰船轴频电场相关结构电学特性的影响很大,是舰船电学特性的重要组成部分。
深入分析舰船轴系的电学特性可知,轴系变化电阻随着舰船转轴的周期性变化,会引起电路各处电流发生波动,其中海水电流的周期性变化,会辐射出轴频电场。此外,舰船电刷接触电阻使电刷两端存在波动电压,并与海水中的电流变化密切相关。
2 舰船轴频电场抑制方法
2.1轴地有源补偿方法的提出
在常规的舰船保养和维护方式下,舰船电刷接触电阻总是很显著,即便是采取严格的保养和维护制度,舰船电刷接触电阻也无法避免,电刷两端依然存在波动电压。为此,本文提出在舰船电路的大轴与接地船壳之间加入一个轴地有源补偿系统Ek,如图1所示。该轴地有源补偿电势Ek可以由一个渐变可控的直流电动势实现。引入合适的轴地有源补偿系统可以抑制舰船的轴频电场。
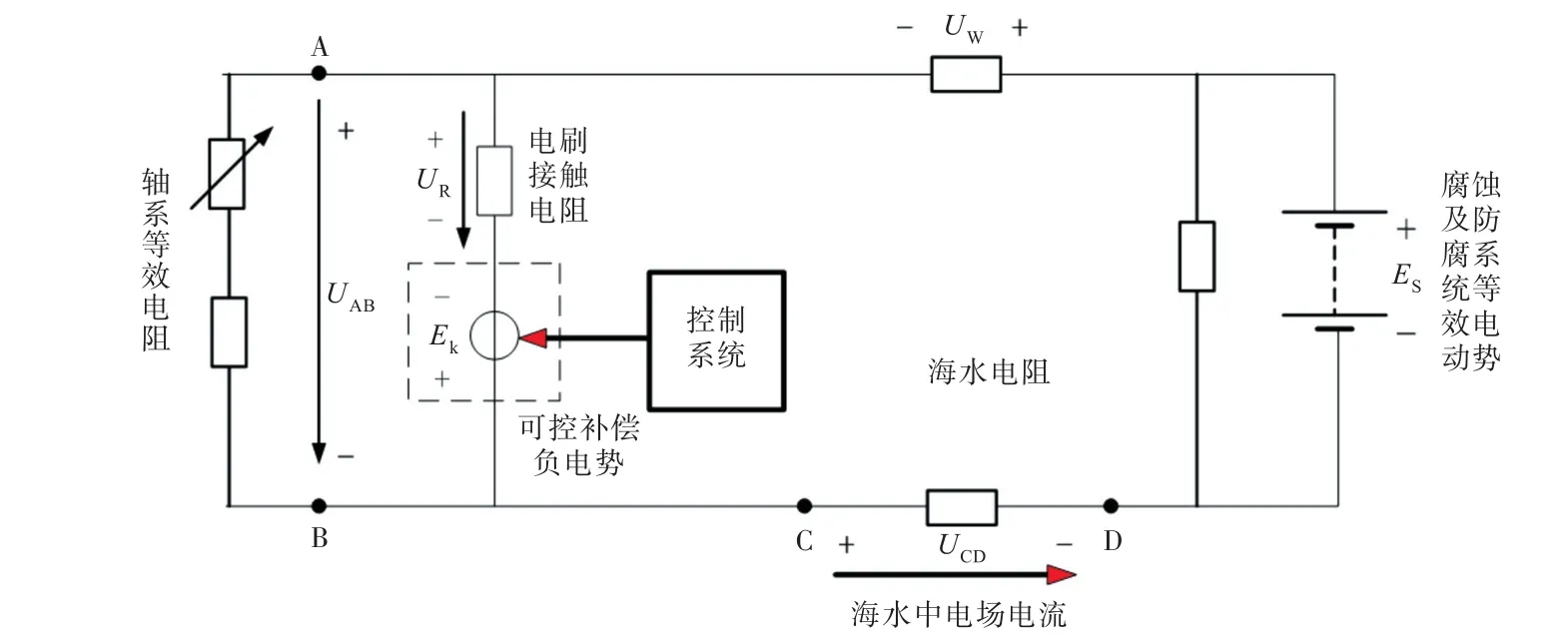
图1 轴系电路加入轴地有源补偿系统示意图Fig.1 Schematic diagram of shaft system with compensation circuit
2.2轴地有源补偿系统原理分析
以渔船JC的轴频电场为例,其轴与轴承之间的接触电阻发生变化引起电压变化,产生周期性变化的电场(也就是说Rb是一个可变的电阻)。若在大轴转动时,保证大轴和船壳之间等电位,即可保证轴地电压的波动为0,从而达到减小轴频电场的目的。在此思路的指导下,提出了轴地有源补偿系统,图2为该系统的原理示意图。图中:Rx为线路电阻值;Rb1为电刷或滑环的接触电阻值;Rb为轴承和齿轮电阻值;Rw为螺旋桨到船体的电阻值;Ew为船壳和螺旋桨之间的腐蚀或防腐电位差。
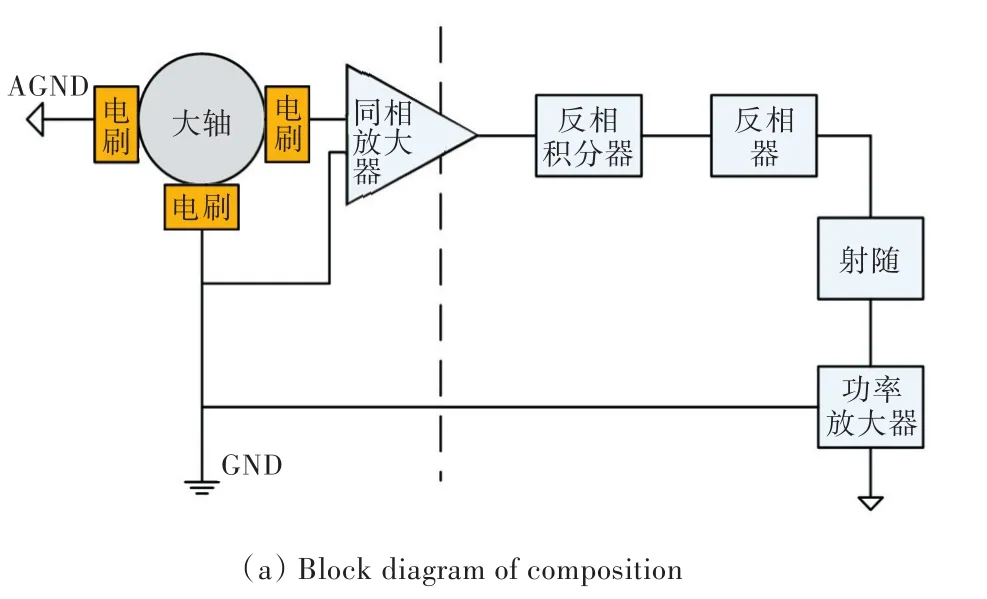
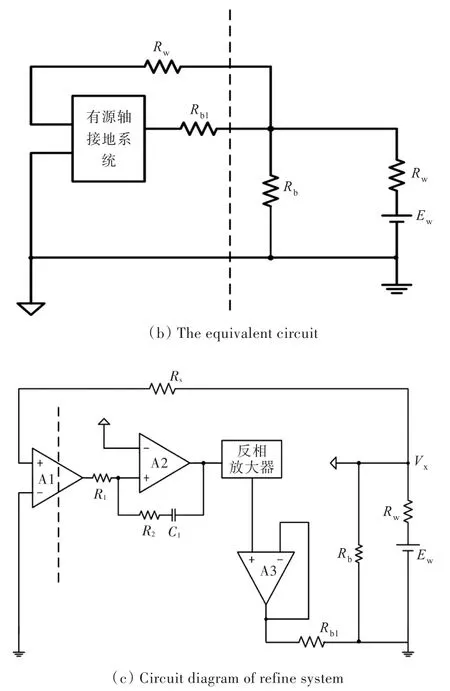
图2 轴地有源补偿系统原理示意图Fig.2 Schematic diagram of compensation circuit
根据基尔霍夫定律,若要使轴地电压Vx为0,只需满足Ew≈IwRw,而Iw=I1+I2,其中,I1为电化学腐蚀或防腐产生的电流,I2为补偿系统的输出电流。根据戴维南电路等效定律,则
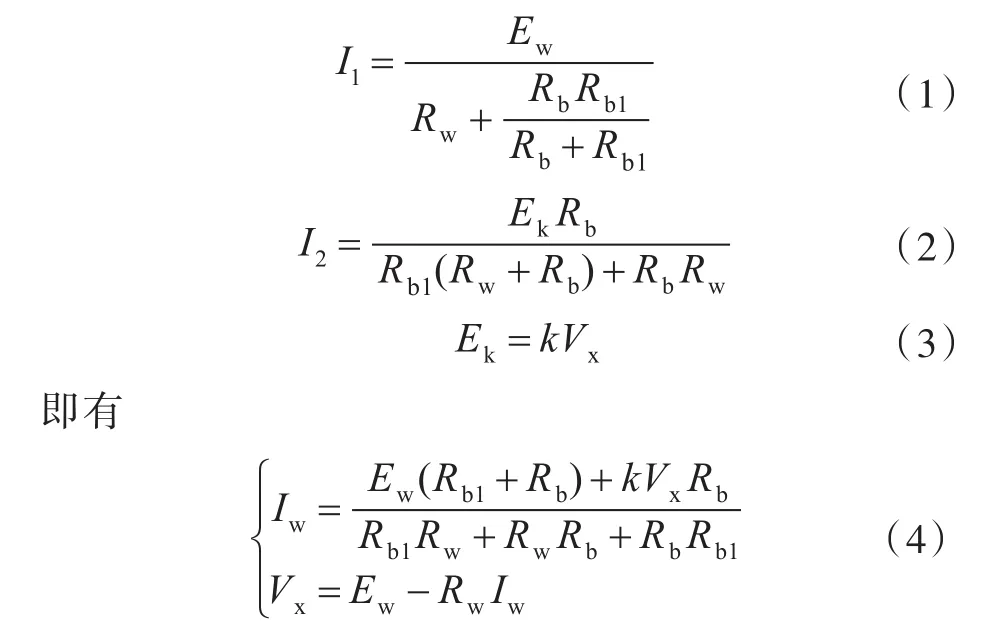
从式(4)中可发现,Vx与 Iw建立了联系,将Iw的表达式代入Vx=Ew-RwIw中,可计算出:

从式(5)中可发现,随着补偿增益k的增大,Vx逐渐减小,即若要求Vx为0,则k→∞。为了研究k值取多大时Vx可近似为0,利用俄罗斯文献提供的参数进行模拟计算,计算条件为:Ew=0.7 V,Rw=0.07 Ω ,Rb=0.03 Ω ,假定Rb1=0.01 Ω,则Vx随k的变化如图3所示(纵坐标中,1 μV为0 dB)。从图3可以发现,若要将Vx控制在100 μV范围内,k应达到1 700以上。
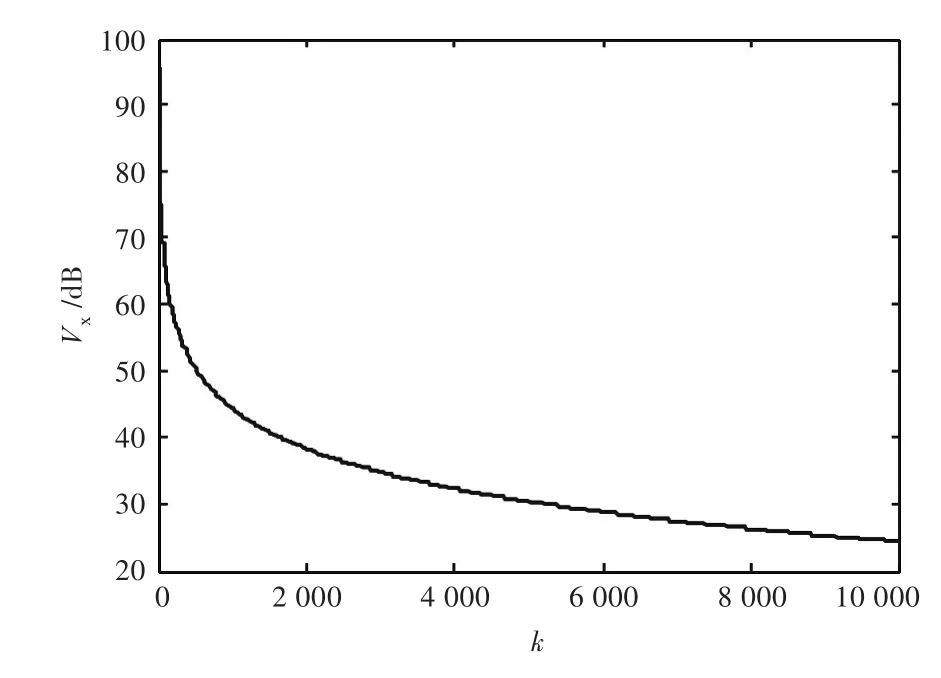
图3 轴地电压与增益的关系曲线Fig.3 Relation curve of the shaft-ground votage and the gain
3 轴地有源补偿系统设计
3.1控制框架
应用轴地有源补偿系统的概念设计实际的舰船轴频电场抑制系统,根据控制系统组成原理(图2),需要考虑如下几点:
1)控制器需要设计可靠的控制系统,使之能够适时调节轴地有源补偿系统Ek,使之自动适应电刷电压UR的变化。
2)为实现轴地有源补偿系统自动适应电刷电压的变化,传感器需要监测某一个能够反映电刷电压变化的物理量。本系统选择监测舰船转轴与舰船壳体之间的电压,因电器外壳常作为电路的参考电位点(也叫接地点),所以通常将舰船转轴与舰船壳体之间的电压简称为轴地电压。
轴地电压通常在毫伏级左右,需要选用精度较高的监测电路。
3)对于执行机构,由于轴频电场抑制系统要求轴地有源补偿系统Ek提供一个反向的电动势,故考虑由反接的可控直流电源作为执行模块,实现轴地有源补偿系统的自适应调节。
3.2功能框架
基于轴地有源补偿系统的舰船轴频电场抑制系统在实现过程中,需要结合具体的舰船轴系结构来完成。
按功能划分,该轴频电场抑制系统包括电压监测、信号调理、判断、控制、驱动、电源输出等功能模块。需要说明的是,因目前出现的许多电路模块集成度高,功能强大,该系统的结构模块不一定与功能模块一一对应,有时一个电路结构模块可能同时实现两个或多个功能模块。
该轴频电场抑制系统的输入接口,是舰船轴系结构中转轴与舰船壳体之间的波动电压,且电压信号微弱,波动量更加微小,需要对微小的电压波动敏感的电压传感器才能满足要求。
对于轴地有源补偿系统的输出接口,需要设计为可控直流电源模块。
4 基于轴地有源补偿系统的轴频电场抑制技术
4.1舰船轴地微弱信号监测与调理
目前,图4(a)所示TMxxxxCP系列隔离变送器是性能优良的微弱信号监测器件,其前级采用毫伏级正负双极性信号输入的有源隔离模块,后级采用正负双极性信号输出的有源隔离模块。
轴频电场抑制系统的轴地微弱信号监测与调理部分的核心部件选用TM1630CP芯片(图4(b)),配合外围辅助电路实现微弱信号的监测与调理功能。
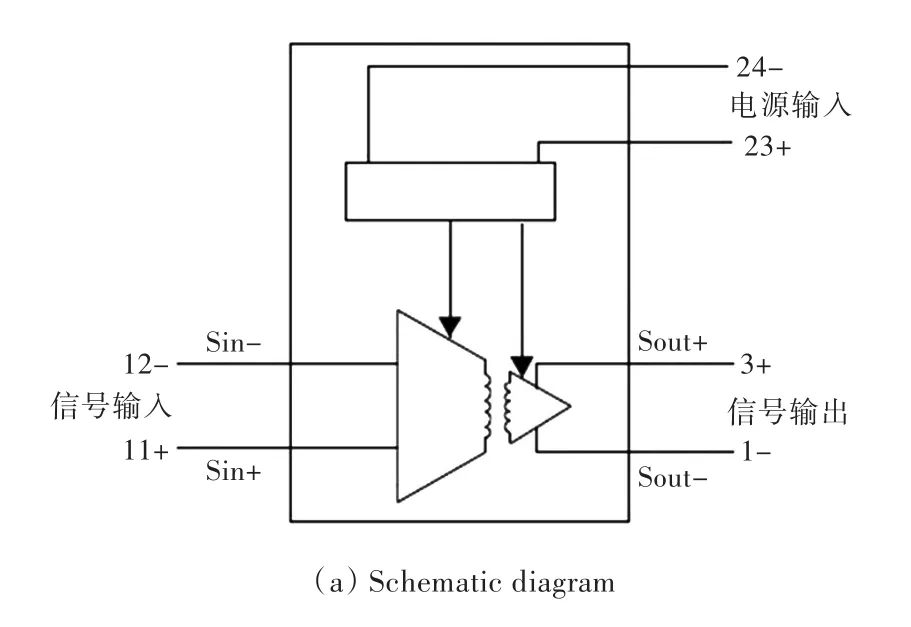
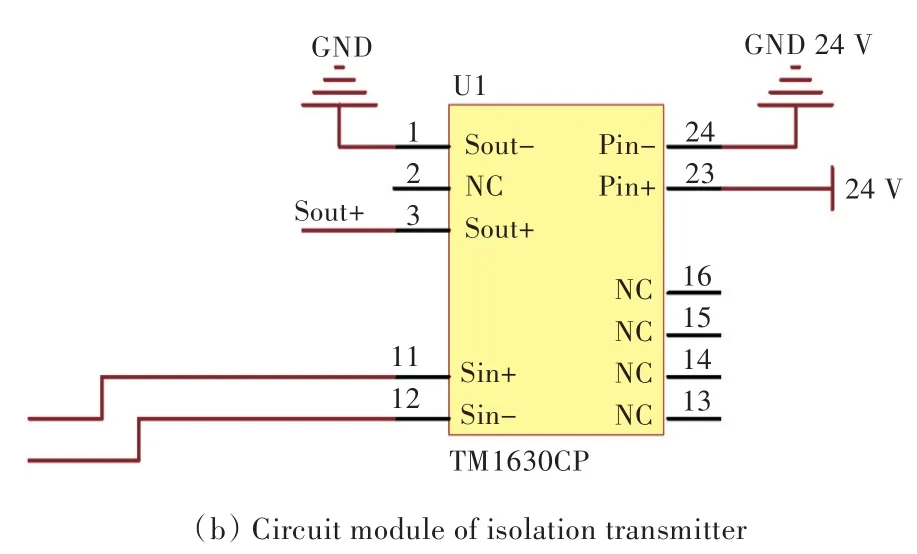
图4 轴地微弱信号监测与调理模块Fig.4 Weak signal monitoring and control module
4.2轴频电场抑制系统判断与控制
图5所示为实现轴频电场抑制系统的逻辑判断与信号控制电路。
图中,Sout+为测得的舰船大轴与船体之间的轴地电压,信号来自轴地微弱信号监测与调理模块。如果Sout+电压升高,电路电流值会因回路电阻的增大而减小。为保证海水电流恒定,需要经过逻辑判断,控制Vsc输出信号。驱动轴地有源补偿系统的值反向增大。一方面,可以拉低轴承两端的电压Sout+回到平衡位置,另一方面,可以增大滑环支路的电流,补偿总电路中因回路电阻增大而减小的电流量,从而维持海水中电流的恒定。反之,如果该Sout+电压降低,电路就会按照相反的逻辑驱动轴地有源补偿系统,控制Vsc输出信号,维持海水中电流恒定。
其中,DAC和FB_AD信号接口与DSP数字信号处理系统连接,当轴承电阻变化对轴频电场的影响被消除到极低的程度时,由DSP系统通过先进的算法,估算出舰船螺旋桨桨叶与电极间海水电阻的变化规律,由DAC接口与控制电路连接通信。
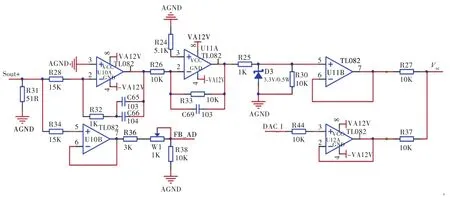
图5 系统逻辑判断与信号控制模块Fig.5 System logic judgment and signal control module
4.3轴地有源补偿系统模块的驱动与功率输出
舰船轴频电场抑制系统需求作为轴地有源补偿系统的可控电源,具有电压低、电流大、负载反应速度高的特点,Vicor公司提出的分比式功率架构(FPA)以及整合功率V·I晶片,可以满足本系统的要求。如图6所示,电压转换模块(VTM)是分比式功率架构的一个基本元件,而预稳压模块(PRM)可将不稳定的电压输入转换为稳压的输出,利用降压—升压稳压器的控制架构,提供精确而稳定的升压、降压电压调节。
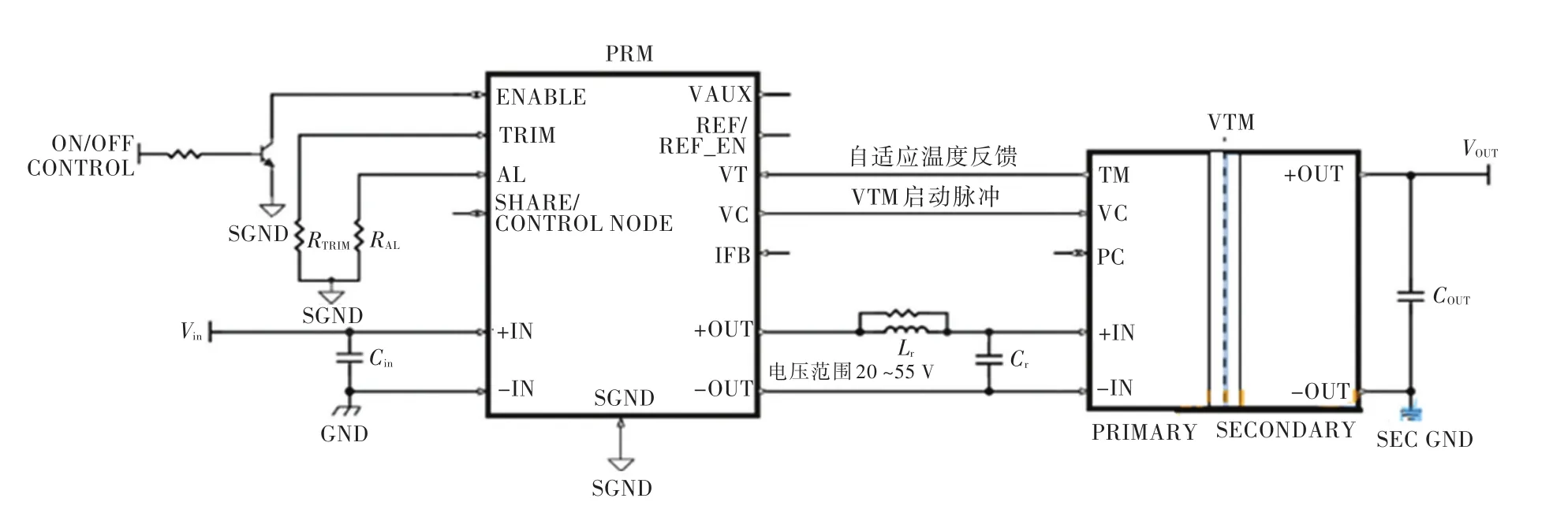
图6 驱动与功率输出核心部件Fig.6 Drive core components and power output
PRM和VTM组合使用便可提供可隔离、稳压输出的DC-DC转换器。PRM只有稳压功能,VTM具有变压和隔离功能。
本系统的驱动和电源模块选用PRM_P045F048与VTM48EF012T130A00组成的高效率、低电压、大电流、负载反应速度快的可控电源,产生舰船电场抑制系统中的轴地有源补偿系统。
5 轴频电场抑制模拟测试试验
5.1试验设备
采用某型舰船的缩比模拟模型进行试验,如图7所示。该缩比模型模拟了实船中与轴频电场关系最为密切的部件。轴承、电刷、滑环及轴系均按比例缩小,螺旋桨用铜质金属片代替,在螺旋桨端放置一个金属容器,容器中装有海水,海水与螺旋桨接触。

图7 某型舰船的缩比模型Fig.7 Scale model of ship shaft system
电场测量电极是一对Ag/AgCl电极,分别固定在2 m长的木棍两端,即测量电极的间距为2 m。在木棍两端加上重物,使木棍保持水平并沉入水中。使电极距离水面1 m,测量电极与螺旋桨间隔3 m,参考电极距2个测量电极1 m。
电场测量装置由信号调理电路、功率放大电路和USB-6216采集卡组成。信号调理电路包括滤波电路和电压放大电路2部分,其中,滤波电路为由二阶低通滤波器和六阶高通滤波器级联组成的带通滤波器,通频带范围1~7 Hz,放大电路对该频带范围内的信号放大约5 000倍。USB-6216采集卡对信号调理电路输出信号进行A/D转换,然后将转换后的数字信号送至计算机,计算机则通过软件控制数据采集与存储。
5.2试验方法
试验中,利用小型电机驱动螺旋桨,转速保持在150 r/min。先在未启动轴频电场轴地有源补偿系统的状态下,测量轴频电场信号,约10 min后,启动轴地有源补偿系统,继续对舰船轴频电场信号进行测量。
5.3数据分析
对试验测试数据进行频谱分析。取启动轴地有源补偿系统前后一段时间内的测量数据进行分析,其频域分布如图8所示。其中,图8(a)为未启动轴频电场抑制电路时测量数据的频域分布,图8(b)为启动轴频电场抑制电路后测量数据的频域分布。
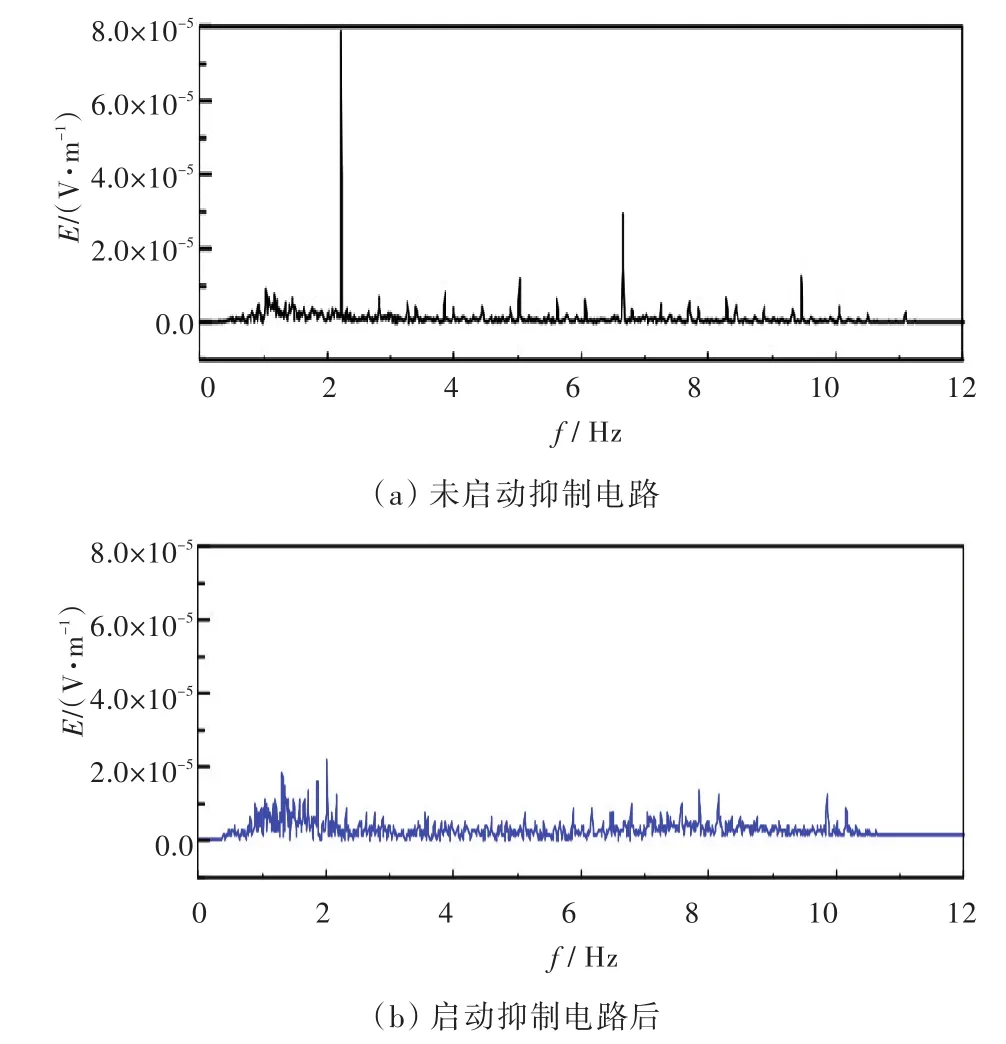
图8 测量数据频域分布Fig.8 Frequency distribution of measurement data
综合分析数据时域和频域特征可知,在启动轴地有源补偿系统前,分布在1~7 Hz的舰船交变电场强度平均值约为2.86×10-4V/m,在启动轴地有源补偿系统后,该频域的交变电场强度值明显降低,平均值约为0.72×10-4V/m。
图8(a)的频域分布显示,未启动轴频电场抑制电路时,舰船电场的测量数据中含有显著频率2.2 Hz的交流分量,很容易换算出该频率对应的舰船转轴转速为132 r/min,而电机启动时我们期望的转速是150 r/min。由于舰船模型存在的制作误差、电机转矩非零、系统摩擦力、电机驱动电压误差等影响,可以认为电场实测数据的频率分量值2.2 Hz与实际电机驱动转速一致。此外,舰船电场的测量数据中还含有显著频率6.6 Hz的交流分量,该频率为基频2.2 Hz的倍频,同样有力地证明了舰船辐射电场与轴频的密切关系。
图8(b)的频域分布显示,启动轴频电场抑制电路后,舰船电场测量数据中原有的显著频率2.2 Hz及其倍频消失了,各频率的能量相当,不含显著频率。这表明启动抑制电路后,测得的舰船辐射电场基本都是频率杂散的环境电场,而舰船轴频电场基本被消除。
6 结 语
本文在研究舰船轴频电场机理及其电学等效模型的基础上,提出了一种基于轴地有源补偿系统的轴频电场抑制技术,分析了轴地有源补偿系统的工作原理,设计了系统的信号处理模块、逻辑控制模块和功率驱动模块。并在实验室采用舰船缩比模型模拟了电场抑制试验。试验表明:本轴地有源补偿系统可以抑制75%以上的舰船轴频电场,是一种有效的舰船轴频电场抑制技术。
[1]林春生,龚沈光.舰船物理场[M].北京:兵器工业出版社,2007.
[2]张海鹏,陈新刚,敖晨阳,等.舰船轴频电场的负电势补偿抑制方法研究[J].电力电子技术,2015,49 (2):24-27. ZHANG Haipeng,CHEN Xingang,AO Chenyang,et. al.Research on the cancellation method of compensat⁃ed negative potential for ship shaft-rate electric field [J].Power Electronics,2015,49(2):24-27.
[3]李俊.舰船电场隐身技术研究[D].武汉:海军工程大学,2010.
[4]DYMARKOWSKI K,UCZCIWEK J.Ships detection based on measurement of electric field in disturbance existing region[C]//Proceeding of the Conference on UDT.London,UK,2000.
[5]张海鹏,陈新刚,敖晨阳,等.基于轴频电场机理的船体结构电学特性分析[J].电气自动化,2015,37 (2):24-26. ZHANG Haipeng,CHEN Xingang,AO Chenyang,et. al.An analysis on electrical properties of ship structure based on the mechanism of shaft-rate electric field [J].ElectricaI Automation,2015,37(2):24-26.
[6]孙明.舰船感应电场和极低频电场研究[D].武汉:海军工程大学,2003.
[7] 周士弘,孙玉兰,刘永志.水中目标非声特性研究及其应用技术[C]//水中目标特性研究论文集.大连,2002.
[8]龚沈光,卢新城.舰船电场特性初步分析[J].海军工程大学学报,2008,20(2):1-4,26. GONG Shenguang,LU Xincheng.Pilot study of elec⁃tric field characteristics of warship[J].Journal of Na⁃val University of Engineering,2008,20(2):1-4,26.
Shaft-ground active compensation technology of the ship shaft-rate electric field
ZHANG Anming1,ZHANG Haipeng2,CHENG Zhenghua3
1 Navy military Representative Office in Dalian Shipbuilding Industry Co.Ltd.,Dalian 116005,China
2 Department of Power Control,Navy Submarine Academy,Qingdao 266042,China
3 The 92730thUnit of PLA,Sanya 572016,China
In order to reduce marine shaft-rate electric field influence and the exposure rate of the ship,the mechanism of the electric field is analyzed in this paper,along with the principle of the active compen⁃sation system.Specifically,the electrical properties are studied based on the analysis of the mechanism of shaft-rate electric field of the ship.The ship shaft-rate electric field suppression is proposed according to the compensated negative potential.The framework and function framework of the system are designed.The weak signal monitoring and processing technology of ship shaft is investigated,and the judgment and con⁃trol technology of the system is studied.The driving and power output module of the negative potential is de⁃signed,where the simulation results show that the ship shaft-rate electric field can be suppressed effective⁃ly with the proposed system,and the stealth property of the ship is simultaneously enhanced.
shaft-rate electric field;potentials compensation;electric field suppression;naval ship
U674.7
A
10.3969/j.issn.1673-3185.2016.02.017
2015-07-01网络出版时间:2016-3-17 10:56
国家自然科学基金资助项目(51377169)
张安明(通信作者),男,1976年生,硕士,工程师。研究方向:电气工程。
E-mail:zhanganming@tsinghua.org.cn
张海鹏,男,1977年生,博士,副教授。研究方向:精密仪器及机械。E-mail:fdrk@163.com
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18 05:46:08
舰船科学技术(2021年12期)2021-03-29 01:28:44
通信电源技术(2018年3期)2018-06-26 08:05:48
新高考·高一物理(2016年7期)2017-01-23 02:52:50
中学生数理化·高二版(2016年9期)2016-05-14 13:19:35
舰船科学技术(2016年1期)2016-02-27 15:39:26
火控雷达技术(2016年3期)2016-02-06 02:30:40
广西文学(2015年9期)2015-10-24 03:53:14
电子设计工程(2014年12期)2014-02-27 11:58:19
